Движения плоскости, их свойства
Преобразование плоскости, сохраняющее расстояния, называется движением (перемещением) плоскости.
Примеры движений
1. Тождественное преобразование.
2. Параллельный перенос.
Параллельным переносом  на вектор
на вектор  называется отображение плоскости в себя, при котором каждой точке
называется отображение плоскости в себя, при котором каждой точке  плоскости ставится в соответствие точка
плоскости ставится в соответствие точка  такая, что
такая, что  .
.
a) Отметим, что параллельный перенос определяется как отображение и, следовательно нужно доказать, что он является преобразованием плоскости, то есть проверить биективность отображения. Сделайте это самостоятельно.
b) Имеем  . Тогда
. Тогда  и
и  , то есть параллельный перенос сохраняет расстояния, а значит, является движением плоскости.
, то есть параллельный перенос сохраняет расстояния, а значит, является движением плоскости.
3. Центральная симметрия.
Центральной симметрией  относительно точки
относительно точки  называется отображение плоскости в себя, при котором каждой точке плоскости ставится в соответствие точка такая, что
называется отображение плоскости в себя, при котором каждой точке плоскости ставится в соответствие точка такая, что  .
.
a) Аналогично нужно показать, что центральная симметрия является преобразованием плоскости.
b) Из условий  и
и  получаем, что
получаем, что  . Тогда
. Тогда  , то есть центральная симметрия сохраняет расстояния, а значит, является движением плоскости.
, то есть центральная симметрия сохраняет расстояния, а значит, является движением плоскости.
Самостоятельно следует рассмотреть доказательство следующих важных теорем
Т е о р е м а 1. При движении образом репера является репер. Образом оротнормированного репера является ортонормированный репер.
Т е о р е м а 2. (о задании движения парой соответствующих ортонормированных реперов) Пусть  и
и  два ортонормированных репера. Существует единственное движение плоскости, которое репер
два ортонормированных репера. Существует единственное движение плоскости, которое репер  переводит в репер
переводит в репер  . При этом движении каждая точка
. При этом движении каждая точка  с координатами
с координатами  в репере
в репере  переходит в точку
переходит в точку  с теми же координатами в репере
с теми же координатами в репере  .
.
Теоремы 1-2 позволяют доказать следующие свойства движений:
1. Движение переводит прямую в прямую, праллельные прямые в параллельные прямые.
2. Движение переводит полуплоскость в полуплоскость.
3. Движение сохраняет простое отношение трех точек прямой, а значит, сохраняет отношение «лежать между», поэтому переводит отрезок в отрезок, луч в луч, угол в угол.
4. Движение переводит угол в равный угол, перпендикулярные прямые в перпендикулярные прямые.
5. Любое движение либо сохраняет ориентацию плоскости (любой репер переводит в одинаково ориентированный с ним репер), либо меняет ориентацию плоскости (любой репер переводит в противоположно ориентированный с ним репер).
Отсюда имеем два вида движений: движения I рода (сохраняющие ориентацию плоскости) и движения II рода (меняющие ориентацию плоскости).
Формулы движений
Пусть  – движение плоскости. Задав на плоскости прямоугольную систему координат
– движение плоскости. Задав на плоскости прямоугольную систему координат  , сможем найти формулы движения
, сможем найти формулы движения  – это формулы, выражающие координаты
– это формулы, выражающие координаты  точки
точки  через координаты
через координаты  точки
точки  – прообраза точки
– прообраза точки  .
.
Пусть при движении  ортонормированный репер
ортонормированный репер  переходит в ортонормированный репер
переходит в ортонормированный репер  . Тогда по теореме 2 о задании движения парой ортонормированных реперов следует, что
. Тогда по теореме 2 о задании движения парой ортонормированных реперов следует, что  имеет координаты
имеет координаты  в репере
в репере  .
.
Рассматривая  и
и  как старую и новую системы координат, получаем, что точка
как старую и новую системы координат, получаем, что точка  имеет соответственно старые координаты
имеет соответственно старые координаты  относительно репера
относительно репера  и новые координаты
и новые координаты  относительно репера
относительно репера  . Используя формулы преобразования координат при переходе от одной системы координат к другой, получим
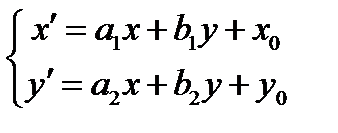
. Используя формулы преобразования координат при переходе от одной системы координат к другой, получим
 (*),
(*),
где  , если
, если  и
и  одинаково ориентированы, то есть
одинаково ориентированы, то есть  – движение первого рода, и
– движение первого рода, и  , если
, если  и
и  противоположно ориентированы, то есть
противоположно ориентированы, то есть  – движение второго рода.
– движение второго рода.
Формулы (*) это и есть формулы движения. Можно заметить, что матрица, составленная из коэффициентов при  и
и  в этих формулах, является ортогональной (сумма квадратов элементов одного и того же столбца равна 1, а сумма произведений соответствующих элементов разных столбцов равна 0); определитель этой матрицы равен 1 в случае движения первого рода и равен -1 в случае движения второго рода.
в этих формулах, является ортогональной (сумма квадратов элементов одного и того же столбца равна 1, а сумма произведений соответствующих элементов разных столбцов равна 0); определитель этой матрицы равен 1 в случае движения первого рода и равен -1 в случае движения второго рода.
Имеет место следующая теорема
Т е о р е м а 3. (об аналитическом задании движения) Пусть  – ортонормированный репер. Формулы
– ортонормированный репер. Формулы
 (**),
(**),
где  – ортогональная матрица, определяют движение первого рода, если определитель
– ортогональная матрица, определяют движение первого рода, если определитель  этой матрицы равен 1 и второго рода, если определитель этой матрицы равен -1.
этой матрицы равен 1 и второго рода, если определитель этой матрицы равен -1.
При доказательстве этой теоремы следует обосновать три момента:
1. Формулы действительно задают преобразование  плоскости (проверить биективность).
плоскости (проверить биективность).
2. Преобразование  сохраняет расстояния (вычисляя расстояние между точками
сохраняет расстояния (вычисляя расстояние между точками  и
и  , использовать формулы (**) и условие ортогональности матрицы, составленной из коэффициентов, показать, что
, использовать формулы (**) и условие ортогональности матрицы, составленной из коэффициентов, показать, что  ).
).
3. Показать, что реперы  и
и  одинаково ориентированы, то есть
одинаково ориентированы, то есть  является движением первого рода, если
является движением первого рода, если  и противоположно ориентированы, то есть
и противоположно ориентированы, то есть  – движение второго рода, если
– движение второго рода, если  . Для этого, используя формулы (**) нужно найти координаты точек
. Для этого, используя формулы (**) нужно найти координаты точек  образов точек
образов точек  , определяющих репер
, определяющих репер  . Далее найти координаты векторов
. Далее найти координаты векторов  и
и  и убедиться, что матрица перехода от базиса
и убедиться, что матрица перехода от базиса  к базису
к базису  имеет вид . Знак определителя этой матрицы характеризует одинаковость ориентации этих базисов, а значит и реперов
имеет вид . Знак определителя этой матрицы характеризует одинаковость ориентации этих базисов, а значит и реперов  и
и  .
.
Примеры движений
У п р а ж н е н и е 1. Найти формулы параллельного переноса. Доказать, что праллельный перенос является движением первого рода. Определить неподвижные точки и неподвижные прямые при параллельном переносе. Доказать, что множество всех праллельных перносов является группой.
У п р а ж н е н и е 2. Поворотом  плоскости вокруг точки
плоскости вокруг точки  на угол
на угол  называется отображение плоскости в себя, при котором точка
называется отображение плоскости в себя, при котором точка  переходит сама в себя, любая другая точка
переходит сама в себя, любая другая точка  плоскости переходит в точку
плоскости переходит в точку  такую, что расстояния
такую, что расстояния  и
и  равны и угол
равны и угол  равен
равен  .
.
Задав на плоскости прямоугольную систему координат  , выразите косинус и синус угла
, выразите косинус и синус угла  через косинусы и синусы углов
через косинусы и синусы углов  и
и  , образованных векторами
, образованных векторами  и
и  с вектором
с вектором  . Далее выразите косинусы и синусы углов и через координаты точек
. Далее выразите косинусы и синусы углов и через координаты точек  и
и  . Убедитесь, что
. Убедитесь, что
 ,
,  , где
, где  .
.
Решая систему 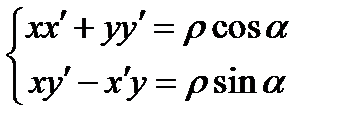 относительно
относительно  и
и  , получим формулы поворота вокруг начала координат:
, получим формулы поворота вокруг начала координат: 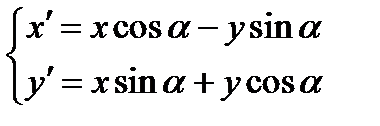 .
.
Убедитесь, что поворот вокруг точки является движением первого рода. Определите неподвижные точки при повороте. Выясните, что представляет собой поворот на угол  . Докажите, что множество всех поворотов с общим центром является группой. Найдите формулы поворота вокруг точки
. Докажите, что множество всех поворотов с общим центром является группой. Найдите формулы поворота вокруг точки  .
.
У п р а ж н е н и е 3. Осевой симметрией  с осью
с осью  называется отображение плоскости в себя, при котором каждой точке плоскости ставится в соответствие точка, симметричная ей относительно прямой
называется отображение плоскости в себя, при котором каждой точке плоскости ставится в соответствие точка, симметричная ей относительно прямой  .
.
Напомним, что каждая точка прямой  симметрична сама себе. Точка, не лежащая на прямой
симметрична сама себе. Точка, не лежащая на прямой  , и симметричная ей точка определяют отрезок, перпендикулярный прмой
, и симметричная ей точка определяют отрезок, перпендикулярный прмой  , середина которого лежит на прямой
, середина которого лежит на прямой  .
.
Найдите формулы симметрии относительно оси  , убедитесь, что осевая симметрия является примером движения второго рода. Найдите неподвижные точки, неподвижные прямые при осевой симметрии. Выясните, что представляет собой композиция двух осевых симметрий с параллельными осями, с пересекающимися осями.
, убедитесь, что осевая симметрия является примером движения второго рода. Найдите неподвижные точки, неподвижные прямые при осевой симметрии. Выясните, что представляет собой композиция двух осевых симметрий с параллельными осями, с пересекающимися осями.
У п р а ж н е н и е 4. Скользящей симметрией называется композиция осевой симметрии и параллельного переноса на вектор, параллельный оси симметрии:  .
.
Покажите, что скользящая симметрия является движением второго рода, отличным от осевой симметрии.
Определите неподвижные точки и неподвижные прямые при скользящей симметрии.
Дата добавления: 2021-09-25; просмотров: 854;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- I. Товар и его свойства.
- II. Ситуационные (нестандартные) движения
- II.3. Физико-химические свойства нефтей и природных газов
- II.4. Классификация нефтей и газов по их химическим и физическим свойствам
- X. Электроповерхностные свойства дисперсных систем
- А) Определяется механическими и тепловыми свойствами
- А. Уравнения движения точки в декартовых координатах

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
