Способы математических описаний САУ.
При составлении математических описаний САУ используют три основных способа. Это:
1.Поэлементный в физических переменных вход-выход на базе физических законов, действующих в простейших частях системы.
2.С помощью уравнений, разрешенных относительно выходных переменных системы (управляемых величин).
3.С помощью уравнений состояния системы.
Третий способ мы пока оставим в стороне и сосредоточимся на первых двух.
1.При первом способе уравнения САУ представляют собой совокупность входящих в систему элементов. Эти элементы могут иметь различную физическую природу (механические, электромеханические, пневматические и т.д.). Для составления их уравнений используются законы Ньютона, Кирхгоффа, Ома и т.д. Методика составления уравнений разработана в таких дисциплинах, как механика, гидравлика, электромеханика.
Пример поэлементного описания САУ.
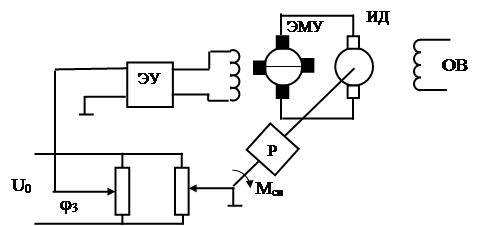 |
Рассмотрим пример поэлементного описания системы на постоянном токе. Принципиальная схема системы приведена на рисунке 29.
Рис.29
ЭУ - электронный усилитель
ЭМУ – электромашинный усилитель
ИД – исполнительный двигатель
aвх, Мс – входные переменные (задающее воздействие и нагрузка)
aвых – выходная переменная (управляемая величина)
В данной САУ можно выделить: блок потенциометров, ЭУ, ЭМУ, исполнительный двигатель с редуктором и объектом управления.
1.Блок потенциометров:
 , k- коэффициент передачи потенциометра.
, k- коэффициент передачи потенциометра.
2.ЭУ:

3.ЭМУ – это 2 генератора, соединенных последовательно:
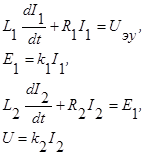
Здесь Uэу – входная переменная ЭМУ, U – выходная переменная, I1,I2,E1 – промежуточные переменные. Исключая их, получаем уравнение ЭМУ, содержащее только входную и выходную переменные:

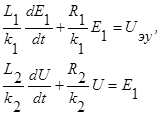
Исключены I1,I2, осталось исключить E1.
Продифференцируем второе уравнение и проведем последовательные преобразования:
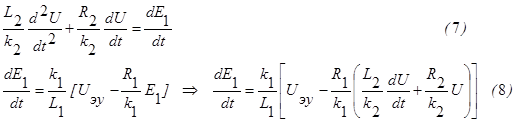
Подставляя (8) в (7), получим:
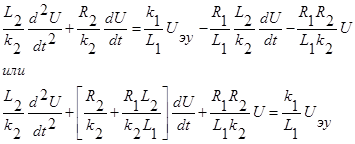
Обычно в ТАУ уравнение приводят к виду, когда коэфф. при U равен 1, т.е. 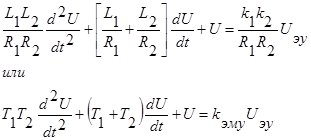
где 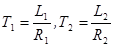 - постоянные времени, характеризующие нарастание токов в обмотке ЭМУ, kэму – коэффициент передачи ЭМУ. Обычно T1*T2<<T1+T2 ЭМУ приближенно описывается дифференциальным уравнением:
- постоянные времени, характеризующие нарастание токов в обмотке ЭМУ, kэму – коэффициент передачи ЭМУ. Обычно T1*T2<<T1+T2 ЭМУ приближенно описывается дифференциальным уравнением:

4.Исполнительный двигатель с редуктором. Входная величина – U, выходная – угол поворота вала двигателя a.
Уравнение ЭДС в цепи якоря двигателя:

где  - противоэдс, возникающая при вращении якоря;
- противоэдс, возникающая при вращении якоря;
Уравнение моментов

 - вращающий момент электродвигателя.
- вращающий момент электродвигателя.
I – основной момент инерции двигателя и ОУ, приведенный к двигателю.
Mс – момент сопротивления, приведенный к двигателю.

Здесь нужно исключить переменные i и w. Покажем, как это делается с помощью преобразований Лапласа. Перейдем от (10)-(12) к уравнениям в изображениях. Тогда
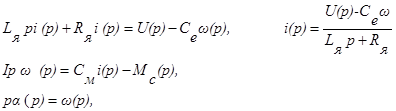
откуда
или

Приводя уравнение к стандартному для ТАУ виду и переходя к оригиналам, получим

Будем считать, что Lя » 0. Это педположение позволяет упростить уравнение двигателя:
или

где 
Редуктор – это безинерционное звено:

Таким образом САУ дает следующую систему уравнений:

В общем случае систему дифференциальных уравнений, получающуюся в результате поэлементного описания можно представить в следующей матричной операторной форме:

где  - матрица выходных переменных элементов,
- матрица выходных переменных элементов,
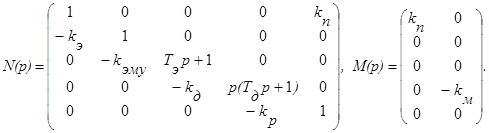
 - матрица входных переменных системы, N(p) – неособая квадратная (r*r) полиномная матрица,
- матрица входных переменных системы, N(p) – неособая квадратная (r*r) полиномная матрица,  - оператор дифференцирования.
- оператор дифференцирования.
В нашем случае  ,
,  ,
,
Математическое описание САУ с помощью уравнений, разрешаемых относительно выходных переменных.
Уравнения САУ в форме (14) или (15) удобны для первоначального составления математического описания по исходным физическим данным, но они не удобны для исследования. В них входят промежуточные “лишние” переменные, что делает матрицы N(p) и M(p) более громоздкими. Поэтому форма (15) является промежуточной для перехода к более удобным формам.
Переход к уравнению, содержащему только одну переменную Xi, (например X1) проводится исключением остальных переменных. Это исключение может быть выполнено традиционными способами теории дифференциальных уравнений, но наиболее удобно выполняется с использованием записи уравнений в операторной форме (15).
Для этого переменные Xi, i=1,r рассматриваем как неизвестные, входные переменные Uj, j=1,m – как известные переменные, полиномы Nij(p),Mij(p) – как функции комплексного переменного. Система (15) рассматривается как система уравнений с r неизвестными, которая разрешается относительно интересующих нас переменных, т.е.

где Di(p) – полином, Xi – скалярная переменная, Mi(p) – матрица-строка.
Уравнение (16)можно получить непосредственно используя способ Крамера. При этом полиномы Di(p) будут одинаковы для всех i,

В рассмотренном примере получим уравнение для переменной aвых. Тогда

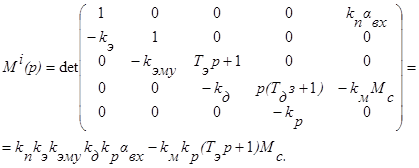
Обозначим К=  . Тогда уравнение (16) для данной САУ примет вид
. Тогда уравнение (16) для данной САУ примет вид 
Это уравнение для выходной величины aвых, записанное в операторной форме. В своей обычной форме оно имеет вид:  Уравнение (17) представляет собой уравнение следящей системы, разрешенное относительно выходной переменной aвых. Аналогичные уравнения могут быть получены и для величин Uп,Uэу,U,w,a.
Уравнение (17) представляет собой уравнение следящей системы, разрешенное относительно выходной переменной aвых. Аналогичные уравнения могут быть получены и для величин Uп,Uэу,U,w,a.
Отметим, что при переходе от системы уравнений (15) к уравнению (16), в принципе могут быть получены эквивалентные математические описания и нужно следить, чтобы этого не произошло.
Прежде всего при решении (15) если det N(p) и элементы Mi(p) для некоторого i имеют общий множитель, то его обычно сокращают и получают уравнение (16), в котором степень Di(p) меньше степени det N(p). Эта операция неверна: при этом не всякое решение (15) будет решением уравнения (16).
Покажем, как это может произойти. Исходная система имеет вид:
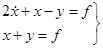
Решаем ее обычным способом:
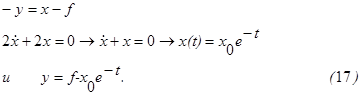
Пусть, например, f=1, x0=1. Тогда 
Запишем, что при f=1, x=0 y=1.
С другой стороны, применяя способ Крамера, получим:

Это, безусловно, решение исходного уравнения, но только одно решение из множества, определяемое выражением (17).
Запишем также, что при переходе от поэлементного САУ к уравнениям высокого порядка относительно выходных переменных (или любой другой интересующей нас переменной) необходимо согласовывать начальные условия по тем переменным, которые участвуют в этих описаниях. В противном случае решения системы (15) и уравнения (16) могут не совпадать.
В общем случае дифференциальное уравнение, определяющее изменение выходного сигнала САУ x(t) при некотором входном воздействии f(t) (задающем или возмущающем) имеет следующий вид:

Именно такие уравнения мы будем рассматривать в дальнейшем. Учет возможного наличия нескольких входных сигналов может проводиться непосредственно в правой части уравнения (18) или с помощью принципа суперпозиции.
| <== предыдущая лекция | | | следующая лекция ==> |
| Классификация САУ. Математическое описание линейных стационарных САУ. | | | Решение дифференциальных уравнений линейных стационарных САУ. Свободный и вынужденный режим движения САУ. |
Дата добавления: 2017-10-04; просмотров: 2944;
Поиск по сайту
Узнать еще
- I. Способы представления переменного синусоидального тока и напряжения.
- MS Word. Выделение текста. Понятие фрагмента текста. Способы форматирования фрагментов, работа с фрагментами (копирование, удаление, перемещение).
- V. СПОСОБЫ ПОЛУЧЕНИЯ И ХИМИЧЕСКИЕ СВОЙСТВА АЦЕТИЛЕНОВЫХ И ДИЕНОВЫХ УГЛЕВОДОРОДОВ
- VII. Риски и способы их минимизации
- Yandex_direct_print() Теплоизоляция - требования, способы крепления
- Абсолютные и относительные показатели вариации и способы их расчёта.
- Абсолютные и средние показатели вариации и способы их расчета
- Автоматизация построения математических моделей оптимизации.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
