Понятие об управлении. Система автоматического управления
Практически во всех областях техники нормальный ход технологических и производственных процессов может быть обеспечен только тогда, когда те или иные величины, определяющие эти процессы, удовлетворяют определенным требованиям.
Например: - в прокатных устройствах толщина прокатываемого металла должна находиться в определенных пределах.
- в различных нагревательных устройствах температура должна поддерживаться в определенных пределах;
- в авиации и мореплавании курс должен выдерживаться постоянным или изменяться по заданному закону
- в ракетной технике и космонавтике вывод ракеты на заданную орбиту должен осуществляться по определенной траектории и т.д.
Практически всегда объект, в котором протекают интересующие нас процессы, сам по себе не способен обеспечить их нужный ход. Даже, если объект способен выдерживать некоторый номинальный режим, то он не может справиться с отклонениями режима от заданного. Эти отклонения вызываются различными причинами, и такие причины всегда найдутся. Воздействия, вызывающие отклонение от номинального режима, назовем возмущающими.
Примеры: автомобиль, генератор напряжения, химический реактор и т.д.
Поэтому такие объекты снабжаются управляющим или регулирующим органом. Этот орган влияет на ход процесса., т.е. управляет им. Примеры: рулевое управление автомобиля, рулевое управление корабля, обмотка возбуждения генератора и т.д.
Организация процесса, обеспечивающая требуемые значения его характеристик, называется управлением.
Исходя из сказанного, можно представить следующую схему (см. рис.1):
 |
Рис. 1.
Управление может быть ручным или автоматическим. При ручном управлении выработку регулирующего воздействия осуществляет человек, наблюдающий за ходом процесса, определяющий отклонение процесса от требуемого и вырабатывающий регулирующее воздействие в зависимости от этого отклонения так, чтобы процесс удовлетворял заданным требованиям.
Примеры: управление автомобилем, оператор аэродинамической трубы и т.д.
При автоматическом управлении выработку регулирующего воздействия осуществляет специальное управляющее устройство. В частном случае, когда задачей управления является поддержание постоянного уровня какой-либо величины, управляющее устройство называют автоматическим регулятором.
Рассмотрим несколько простых примеров, иллюстрирующих необходимость введения управляющих устройств.
Генератор напряжения.
Принципиальная схема генератора показана на рис.2
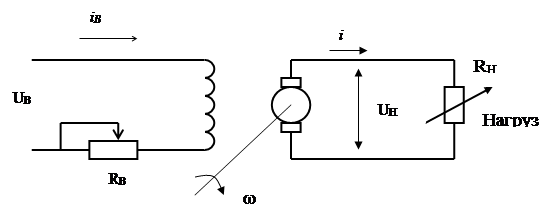 |
Рис. 2
При постоянных Uн, Rн имеем Uн=const .
Однако при изменении нагрузки напряжение Uн изменяется. Соответствующие зависимости имеют вид :
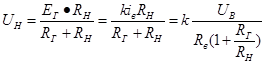
Пусть, например, Rн увеличилось. Тогда Uн при неизменных Uв , Rв также увеличивается (см.рис.3). Однако, если Rн вернется к прежнему значению , то и величина Uн вернется к прежнему значению.
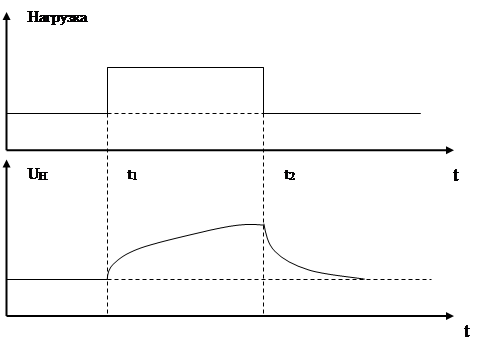 |
Рис.3
Объекты, обладающие свойством возвращатся к прежнему состоянию после устранения причин, вызвавших изменения этого состояния, называются устойчивыми. В принципе, они могут работать и без регуляторов. Однако и в таких объектах применение управляющих устройств (регуляторов) может существенно улучшить их свойства.
 |
Движение корабля.
Рис.4.
Величина φ определяет курс корабля (см. рис.4). Предположим что возникает возмущающий момент , изменяющий курс корабля, при этом руль (регулирующий орган) своего положения не изменяет. Из-за возмущающего момента курс начинает изменятся . После устранения возмущения курс перестает изменяться , но к прежнему значению он не возвращается , новое его значение зависит от времени действия возмущающегося момента (см. рис. 5)
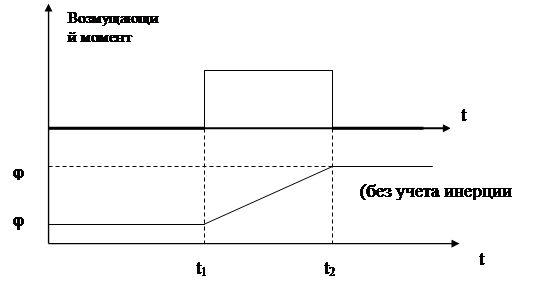 |
Рис.5.
Такие объекты называют нейтральными . Нейтральный объект не может обеспечить требуемый режим работы без управляющего устройства (регулятора).
Некоторые объекты – ядерный реактор, самолет в режиме штопора – таковы что изменения их входных величин (мощности, скорости и т.п.) после устранения возмущений не остаются постоянными , но возрастают с течением времени . Эти объекты можно назвать неустойчивыми . Неустойчивые объекты принципиально не могут работать без управляющего устройства.
Таким образом, чтобы обеспечить нормальный рабочий режим необходимо в зависимости от отклонений рабочего режима от заданного воздействовать на регулирующий орган так, чтобы ликвидировать эти отклонения.
Объект, которым управляют, называется объектом управления (ОУ). Величины, характеризующие протекающие в ОУ процессы, т.е. величины , которые нужно поддерживать постоянными или изменять их по некоторому , называются управляемыми или регулируемыми величинами.
Совокупность объекта управления и управляющего устройства образует систему автоматического управления (САУ).
Объекты управления различны по своему назначению и по физическому содержанию (электрические, гидравлические и т.д.). Соответственно конкретные управляющие устройства будут различными для разных объектов управления. Однако формирование таких устройств, формирование процессов управления различными объектами основывается на общих законах и правилах. Изучением таких общих законов и правил и занимается теория автоматического управления. Иначе говоря ТАУ изучает принципы и методы построения систем автоматического управления относительно к их физическому содержанию.
Краткий очерк развития ТАУ.
Задача создания автоматических регуляторов возникла сразу после появления относительно сложных технических устройств. Таковыми оказались паровые машины. В 1765 году И.И. Ползунов изобрел регулятор,
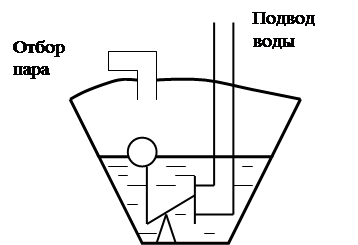 |
поддерживающий постоянство уровня воды в котле паровой машины. Принципиальная схема регулирования показана на рис.6.
Рис.6.
Регулируемой величиной является уровень воды в топке H.
Причиной, вызывающей отклонения уровня от требуемого значения, является изменение величины отбора пара.
В 1784 Д. Уатт изобрел автоматический регулятор скорости вращения вала паровой машины (см.рис.7).
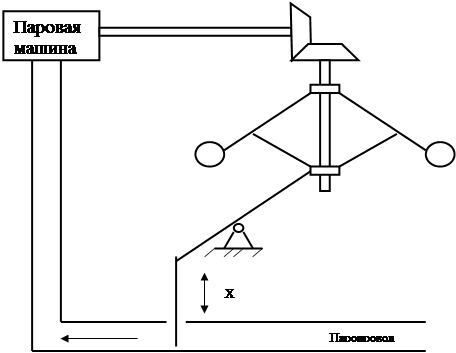 |
Рис.7.
При увеличении скорости ω величина x уменьшается, заслонка прикрывается, что ведет к уменьшению количества поступающего в машину пара и уменьшению начавшей возрастать скорости. Аналогичная картина будет наблюдаться при уменьшении угловой скорости ω.
Теория автоматического управления была заложена в 19 веке работами ученых ряда стран. Среди них можно выделить работы русского математика И.В. Вышнеградского “Об общей теории регуляторов “ и “О регуляторах не прямого действия “. Выдающую роль в развитии ТАУ сыграл А.М. Ляпунов, работы которого по устойчивости движения определили многие направления ее развития.
Активное развитие ТАУ начинается с 30-х годов 20в. Период до конца 50-х годов можно назвать классическим – в это время формируется окончательно та ее часть, которая рассматривается в нашем курсе.
Крупными учеными, внесшими большой вклад в развитие ТАУ явились А.А. Андронов, Я.З. Цыпкин, А.А. Фельдбаум, А.М. Лешов, Е.П.Попов, Б.Н. Петров и др. Крупнейшими центрами развития ТАУ явились Институт проблем управления, МВТУ им. Н.Э. Баумана, МАИ и др.
Период с начала 60-х годов можно назвать современным. Это время, когда создается теория сложных систем, одновременно управляющих несколькими величинами, теория дискретных систем, управляемых ЦВМ, адаптивных систем, систем с искусственным интеллектом, использующие сложные алгоритмы идентификации и оценивания и т.п.
| <== предыдущая лекция | | | следующая лекция ==> |
| Распределение интенсивности в дифракционной картине от одной щели. Метод диаграмм. | | | Частотные характеристики линейных САУ. |
Дата добавления: 2017-10-04; просмотров: 1520;
Поиск по сайту
Узнать еще
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- CRM - стратегия управления взаимоотношениями с клиентом
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
