Тема 6.5. Настройка контура регулирования тока ДПТ без учета влияния ЭДС.
Правильная настройка регулятора тока РТ является необходимым условием получения нужного качества переходных процессов в замкнутых системах автоматического регулирования. Быстродействие контура регулирования тока (внутреннего контура) определяет предельно возможное быстродействие контура регулирования скорости (внешнего контура).
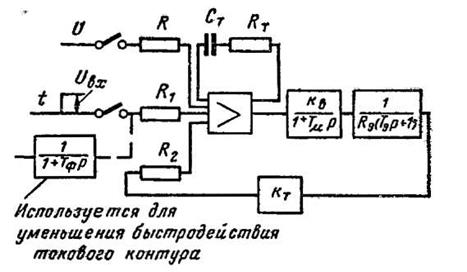
Рис. 8-76. Структура контура якорного тока:
Rэ, Тэ — сопротивление и электромагнитная постоянная времени якорной цепи: KB, КT — коэффициенты усиления преобразователя и датчика тока; Тµ, — сумма малых постоянных времени токового контура.
В ходе наладочных работ для выбора нужного значения быстродействия контура регулирования тока необходимо рассчитать и выбрать значение сопротивления резисторов R2 и Rт и емкость конденсатора Ст. При этом в этой теме рассматривается методика выбора этих значений в предположений что ЭДС двигателя не оказывает существенного влияния на качество динамических процессов контура регулирования тока (обмотка возбуждения отключена).
Определение параметров контура регулирования тока проводится в следующей последовательности:
1. Задаются емкостью конденсатора Ст = 0,2 ÷ 1 мкФ.
2. Расчитывают сопротивление резистора Rт =  , где Тэ- электромагнитная постоянная времени якорной цепи (принимается равной 1 ÷ 5 мсек или определяется экспериментально).
, где Тэ- электромагнитная постоянная времени якорной цепи (принимается равной 1 ÷ 5 мсек или определяется экспериментально).
Рассчитанные значения Ст и Rт в цепи обратной связи регулятора тока РТ обеспечивают компенсацию электромагнитной постоянной времени якорной цепи.
3. Ориентировочно определяют сопротивление резистора R2: R2 =  ,
,
где Тµ - сумма малых постоянных времени контура регулирования тока (принимается равной
4 ÷10 мсек); Кв =  – коэффициент усиления ТУВ;
– коэффициент усиления ТУВ;  - напряжение управления, соответствующее значению
- напряжение управления, соответствующее значению  ; Кт – коэффициент усиления (передачи) датчика тока; Rэ – сопротивление якорной цепи двигателя.
; Кт – коэффициент усиления (передачи) датчика тока; Rэ – сопротивление якорной цепи двигателя.
Вычисленное значение сопротивления R2 обязательно должно быть проверено экспериментально, так как все составляющие, входящие в эту формулу, могут иметь значительную погрешность.
4. Собирают схему контура якорного тока (рис.8-76), отключая при этом цепь возбуждения двигателя и цепь обратной связи по скорости вращения двигателя.
5. На вход регулятора тока через резистор R подают такой входной сигнал U, чтобы по якорной цепи протекал начальный непрерывный ток для исключения влияния зоны нечувствительности на быстродействие контура РТ.
6. Затем входной сигнал увеличивают скачком, подавая через резистор R1 сигнал Uвх. При этом установившиеся значение якорного тока должно также увеличится.
По осциллографу, подключенному к выходу датчика тока ДТ, наблюдают график переходного процесса изменения тока якоря. Значение сопротивления резистора R2 считается правильно выбранным, если перерегулирование выходного значения тока находится на уровне 5 ÷ 8 % от установленного значения. Если перерегулирование окажется больше, то сопротивление R2 необходимо увеличить. Если перерегулирование имеет значение меньше 5 %, то значение сопротивления R2 необходимо уменьшить (см. рис.8-77, а).
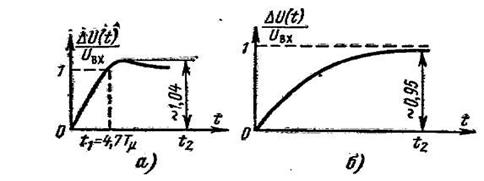
Рис. 8-77. Переходный процесс  (t) для выходной величины датчика тока:
(t) для выходной величины датчика тока:
а — оптимальная настройка; б — апериодическая настройка
7. Оптимальное быстродействие в контуре регулирования тока будет в том случае, если время нарастания выходной величины до первого установившегося значения примерно равняется 4,7Тµ. По экспериментальным данным величина Тµ обычно составляет 4 ÷10 мсек.
8. В том случае, если отношение  < Тэ, то имеет место недокомпенсация электромагнитной постоянной времени Тэ и время нарастания якорного тока возрастает по сравнению со значением 4,7Тµ. В том случае, когда динамические параметры якорной цепи неизвестны, целесообразно выбирать величину заведомо больше, чем Тэ. Незначительная перекомпенсация при этом не приведет к существенному искажению графика переходного процесса. Если перекомпенсация окажется существенной, то график переходного процесса оказывается искаженным и в этом случае необходимо уменьшить сопротивление резистора Rт.
< Тэ, то имеет место недокомпенсация электромагнитной постоянной времени Тэ и время нарастания якорного тока возрастает по сравнению со значением 4,7Тµ. В том случае, когда динамические параметры якорной цепи неизвестны, целесообразно выбирать величину заведомо больше, чем Тэ. Незначительная перекомпенсация при этом не приведет к существенному искажению графика переходного процесса. Если перекомпенсация окажется существенной, то график переходного процесса оказывается искаженным и в этом случае необходимо уменьшить сопротивление резистора Rт.
9. После настройки и выбора элементов контура входной сигнал Uвх устанавливается таким, при котором ток якоря двигателя находится на уровне (0,3÷0,4)·Iн. Время нахождения двигателя под таким током должно быть минимальным, а обратная связь по скорости вращения двигателя обязательно должна быть отключена во избежание аварийного нарастании скорости вращения двигателя.
10. Иногда по условиям работы установки приходится уменьшать быстродействие контура тока. Для этого на входе контура устанавливается дополнительный фильтр (см. рис.8-76).
СР Тема 6.6. Настройка контура регулирования тока ДПТ с учетом влияния ЭДС.
Влияние ЭДС двигателя при подключенной к схеме обмотке возбуждения сказывается на росте коэффициента колебательности контура РТ и уменьшении коэффициента усиления РТ. Переходный процесс контура РТ при ступенчатом увеличении входного сигнала Uвх, полученный с учетом влияния ЭДС двигателя (рис.8-78) отличается от процесса полученного без учета влияния ЭДС двигателя (рис.8-77 в теме 6.5): при одном и том же значении Uвх уменьшается установившееся значение якорного тока и растет перерегулирование якорного тока. 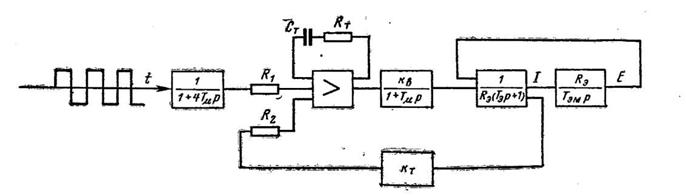
Рис. 8-78. Структура контура якорного тока при учете влияния э. д. с.
Степень уменьшения установившегося значения тока якоря зависит от эквивалентной постоянной интегрирования контура В и электромеханической постоянной времени электропривода Тэм. Коэффициент усиления контура РТ при этом будет равен
К =  где В =
где В = 
Колебательность переходного процесса тока якоря (количество колебаний тока якоря от старого установившегося значения до нового установившегося значения) возрастает с ростом соотношения  , где Тя –полная постоянная времени якорной цепи. Чем больше это соотношение, тем больше перерегулирование якорного тока.
, где Тя –полная постоянная времени якорной цепи. Чем больше это соотношение, тем больше перерегулирование якорного тока.
Уменьшение коэффициента усиления регулятора тока должно быть в ходе наладочных работ скомпенсировано соответствующим увеличением усиления контура РС (операционного усилителя – регулятора скорости). Коэффициент усиления РС зависит от величины резистора Rс , включенного в цепь отрицательной обратной связи этого операционного усилителя. При увеличении сопротивления резистора Rс коэффициент усиления увеличивается, а при уменьшении - коэффициент усиления уменьшается. Таким образом, подобрав величину сопротивления Rс компенсируют уменьшение коэффициента усиления регулятора тока.
Повышенный коэффициент колебательности контура РТ ограничивает возможное быстродействие контура РС. Опыт проведения наладочных работ свидетельствует о том, что для современных систем импульсно - фазового управления при соотношении 4Тя < Тэм не возникает необходимости компенсации ЭДС вообще, так как ухудшение характера переходного процесса при этом незначительно. В этом случае настройку контура регулирования тока двигателя выполняют при неподвижном якоре двигателя по методике изложенной в предыдущей теме.
Если же 4Тя  Тэм, а СИФУ достаточно быстродействующая, то параметры РТ выбираются из следующих соотношений: Rт· Ст = 4 Тµ;
Тэм, а СИФУ достаточно быстродействующая, то параметры РТ выбираются из следующих соотношений: Rт· Ст = 4 Тµ;  .
.
При выполнении этих условий (установка в эти схемы новых рассчитанных значений Rт, Ст и R2) максимальное перерегулирование контура РТ будет составлять 43%. Для дальнейшего снижения перерегулирования в ходе наладочных работ необходимо установить на входе контура РТ специальный фильтр с постоянной времени 4Тµ (см. рис.8-76).
Далее выбранные и рассчитанные значения параметров РТ должны быть экспериментально проверены по следующей методике:
1. Предварительно на неподвижном приводе и при отключенной обмотке возбуждения вновь проверяется настройка контура РТ по методике изложенной в теме 6.5. При этом экспериментально определяются окончательные величины Rт, Ст и R2, а также величина соотношения 
2. При отсутствии якорного тока устанавливается номинальное напряжение возбуждения на обмотке возбуждения двигателя.
3. На вход регулятора тока кратковременно подают сигнал задания по току Uвх такой продолжительности, при которой якорный ток достигает установившегося значения, после этого полярность этого сигнала меняют на противоположную (для исключения разгона двигателя до большой частоты вращения).
4. Сохраняя неизменным соотношение  одновременно уменьшают значение Rт, R2 и R1 до такого уровня, при котором ток якоря имеет перерегулирование ниже 43 % при ступенчатом выходном сигнале Uвх.
одновременно уменьшают значение Rт, R2 и R1 до такого уровня, при котором ток якоря имеет перерегулирование ниже 43 % при ступенчатом выходном сигнале Uвх.
5. После подбора необходимого значения резистора Rт принимают значение резистора Rзт , равное Rт.
6. При проведении вышеперечисленных наладочных работ системы управления ТУВ обоих направлений (при различных полярностях входного сигнала Uвх) должны быть настроены идентично, чтобы практически отсутствовала зона нечувствительности.
Для подбора величины сопротивлений резисторов в ходе наладочных работ как правило используются лабораторные магазины сопротивлений.
Дата добавления: 2017-10-04; просмотров: 2600;
Поиск по сайту
Узнать еще
- A ... метка (без метки) на шатуне (стрелка) для 26.20b Измерение внутреннего диаметра
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
