Теленаведение методом накрытия
Для осуществления управления полетом ЛА в пространстве необходимо измерять угловые координаты цели в двух взаимно перпендикулярных плоскостях и вырабатывать в каждой плоскости параметр рассогласования  (или
(или  ) измерением углового отклонения ЛА от оси луча РЛС, следящей за целью (см. п. 3.2.2 лекции 8). Функциональная схема аппаратуры управления показана на рис. 5.4. Аппаратура, расположенная на командном пункте, состоит из РЛС слежения за целью, излучение которой формирует также управляющий радиолуч.
) измерением углового отклонения ЛА от оси луча РЛС, следящей за целью (см. п. 3.2.2 лекции 8). Функциональная схема аппаратуры управления показана на рис. 5.4. Аппаратура, расположенная на командном пункте, состоит из РЛС слежения за целью, излучение которой формирует также управляющий радиолуч.
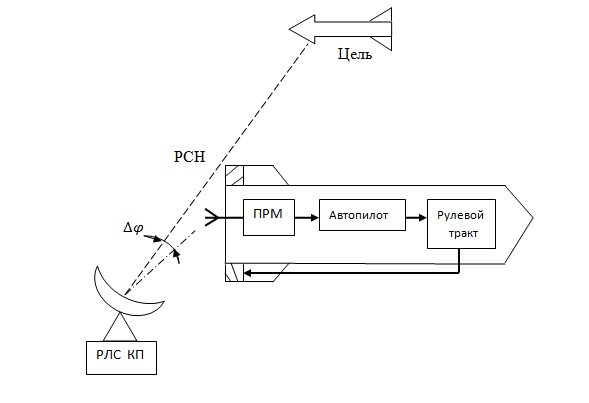
Рисунок 5.4 - Принцип теленаведения в луче
На борту ЛА размещается приемная аппаратура устройства измерения углового параметра рассогласования с приемной антенной и автопилот с рулевым трактом. Измерение дальности до цели при управлении не требуется. Это большое преимущество теленаведения методом накрытия, так как обеспечивается высокая помехозащищенность. При включении, например, на цели генератора помех угловые координаты могут быть измерены методом пассивной радиолокации по помеховому излучению.
Для измерения текущих угловых координат цели может быть использован любой метод автоматического сопровождения по направлению (АСН), однако в системах теленаведения по лучу используется метод конического сканирования. При этом измерить параметр рассогласования можно непосредственно на борту. На рисунке 5.5 представлена функциональная схема координатора теленаведения, состоящая из РЛС с коническим сканированием луча диаграммы направленности. Она отличается от обычной импульсной РЛС сопровождения целей только использованием дополнительной кодоимпульсной или частотно-импульсной модуляции излучения ПРД для передачи опорного напряжения в бортовое устройство.
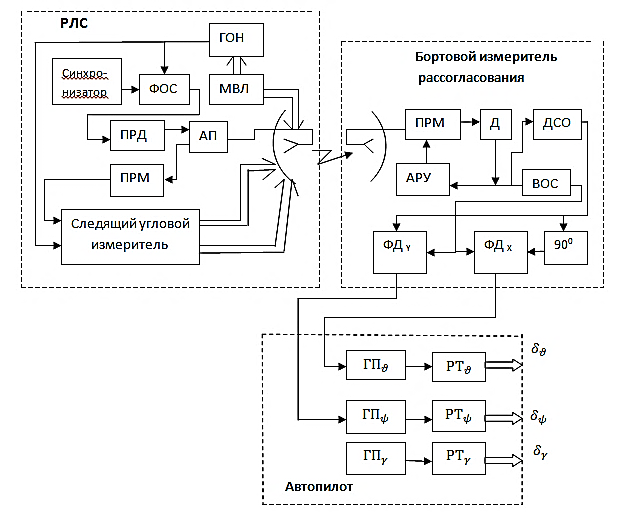
Рисунок 5.5 - Функциональная схема координатора теленаведения
Функциональная схема бортового измерителя рассогласования (БИР) отличается от такого же устройства РЛС на КП лишь наличием канала выделения опорного сигнала.
Функциональная схема РЛС КП содержит блок формирования опорного сигнала (ФОС), в котором производится модуляция импульсной последовательности синхроимпульсов напряжением опорного генератора (ГОН), вращаемого синхронно с излучателем мотором вращения луча (МВЛ).
Функциональная схема БИР содержит ПРМ со схемой АРУ, детектор сигнала ошибки (ДСО), блок выделения опорного сигнала (ВОС) и фазовые детекторы (ФД), на выходах которых образуются напряжения, пропорциональные углу рассогласования  и
и  ЛА относительно равносигнальной линии управляющей РЛС. Применение АРУ определяется большим динамическим диапазоном сигналов на входе ПРМ БИР, пропорциональным (если не учитывать амплитудных флюктуаций) отношению
ЛА относительно равносигнальной линии управляющей РЛС. Применение АРУ определяется большим динамическим диапазоном сигналов на входе ПРМ БИР, пропорциональным (если не учитывать амплитудных флюктуаций) отношению
 . (5.10)
. (5.10)
В автопилот входят гироскопы (ГП), измеряющие углы тангажа, рыскания и крена, и соответствующие рулевые тракты (РТ). Измерение угловых координат методом конического сканирования подробно изучено вами в дисциплине «Радиолокационные системы».
Несмотря на отсутствие необходимости в измерении дальности до цели, РЛС слежения снабжается автоселектором дальности, что позволяет открывать ПРМ только на время прихода сигнала от одной цели. В случае, если цель несет на себе помеху самоприкрытия, селекция целей по дальности становится невозможной, но где бы не находился строб дальности, открывающий ПРМ РЛС, напряжение помехи поступит на блоки системы АСН, и благодаря модуляции помехи сканированием ДН приемной антенны носитель помех будет сопровождаться по направлению практически с той же точностью, что и отражающая цель.
Как уже отмечалось, для передачи опорного сигнала на борт ЛА используют дополнительную модуляцию зондирующего сигнала по любому параметру, кроме амплитуды, так как амплитудная модуляция несет информацию о рассогласовании по углу. Может быть использована частотно-импульсная модуляция или, например, передача в моменты перехода опорной синусоиды через нуль специальных синхроимпульсов, отличающихся от зондирующих либо длительностью, либо кодированием.
ПРМ БИР принимает сигналы КП антенной, расположенной в хвостовой части ЛА, что создает трудности из-за прохождения ЭМИ через ионизированную плазму факела двигателя. Характеристики ослабления сигнала зависят от длины волны излучения, вида сжигаемого топлива, типа реактивного двигателя и ряда иных параметров. Среднее значение ослабления может достигать нескольких десятков децибел. Существенное влияние на точность наведения оказывают флюктуации сигнала при ослаблении в факеле, вызываемые рысканием ЛА на курсе, турбулентностью газов внутри факела и другими причинами, причем глубина паразитной модуляции может существенно превышать 50%, а интенсивная часть спектра флюктуаций может лежать вблизи частоты сканирования, создавая заметный уровень флюктуационных помех в полосе пропускания контура управления.
К числу еще одной особенности работы радиоаппаратуры в радиолуче относится работа на стартовом участке. После пуска снаряда, когда действует автономная система управления, устойчивый переход на радиоуправляемый полет в узком радиолуче возможен лишь при определенных углах подхода снаряда к лучу. При больших углах возможен «проскок» снаряда через луч, при малых – длительное пребывание в зоне действия боковых лепестков. Последние могут образовывать ложные равносигнальные направления, препятствующие сближению снаряда с главным равносигнальным направлением. Нарушение нормальной работы бортовой аппаратуры при вхождении в луч может происходить и при отсутствии или весьма низком уровне боковых лепестков за счет прерывистого облучения снаряда вблизи конуса сканирования. В этом случае принимаемые сигналы имеют вид пачек, повторяющихся с частотой сканирования. Потеря чувствительности ПРМ после прохождения сильной пачки приводит к прерывистой работе канала формирования сигнала ошибки и искажает работу органов управления снарядом.
Процесс ввода снаряда в луч облегчается, если пункт управления имеет добавочную, широкую диаграмму направленности. Снаряд предварительно управляется сигналом широкого луча (порядка 20°), а когда управляющие сигналы широкого луча становятся меньше сигналов узкого луча, переходит на управление узким лучом. Некоторые усложнения бортовой и наземной аппаратуры окупаются надежностью ввода снаряда в луч.
Скручивание координат. При декартовом рулевом управлении и стабилизации ЛА по крену (с помощью канала крена автопилота) каналы тангажа и рыскания развязаны друг относительно друга и управляют ЛА в двух взаимно перпендикулярных плоскостях независимо. При этих условиях контуры автоматического управления ЛА на траектории в одной и другой плоскостях оказываются также независимыми друг от друга. Поскольку разложение вектора углового рассогласования  на составляющие по осям координат в картинной плоскости[1] определяется фазовым сдвигом огибающей модулированных сигналов относительно квадратурных составляющих опорного напряжения (см. лаб. работу), постольку фазовые искажения в тракте приема модулированного сигнала или приема опорного напряжения приводят к такому изменению составляющих параметра рассогласования, которое эквивалентно их изменению при повороте осей координат XY в положение X*Y* вокруг оси OZ с преобразованием составляющих
на составляющие по осям координат в картинной плоскости[1] определяется фазовым сдвигом огибающей модулированных сигналов относительно квадратурных составляющих опорного напряжения (см. лаб. работу), постольку фазовые искажения в тракте приема модулированного сигнала или приема опорного напряжения приводят к такому изменению составляющих параметра рассогласования, которое эквивалентно их изменению при повороте осей координат XY в положение X*Y* вокруг оси OZ с преобразованием составляющих  и
и  в составляющие
в составляющие  и
и  . Это явление носит название «скручивание координат». Основными источниками фазовых сдвигов в бортовой аппаратуре, которые приводят к скручиванию координат, могут явиться неправильный выбор постоянной времени АРУ ПРМ и неправильный выбор полосы ФНЧ для выделения опорного сигнала. Постоянная времени АРУ должна быть по крайней мере на порядок больше периода сканирования, а полоса ФНЧ по возможности шире, но так чтобы через фильтр не проходила вторая гармоника частоты сканирования, что было бы эквивалентно нелинейному искажению опорного напряжения.
. Это явление носит название «скручивание координат». Основными источниками фазовых сдвигов в бортовой аппаратуре, которые приводят к скручиванию координат, могут явиться неправильный выбор постоянной времени АРУ ПРМ и неправильный выбор полосы ФНЧ для выделения опорного сигнала. Постоянная времени АРУ должна быть по крайней мере на порядок больше периода сканирования, а полоса ФНЧ по возможности шире, но так чтобы через фильтр не проходила вторая гармоника частоты сканирования, что было бы эквивалентно нелинейному искажению опорного напряжения.
Если фазовый сдвиг опорного напряжения обозначить  , а фазовый сдвиг огибающей сигнала в цепях ПРМ
, а фазовый сдвиг огибающей сигнала в цепях ПРМ  , то
, то
 ,
,  , (5.11)
, (5.11)
здесь  - крутизна пеленгационной характеристики БИР,
- крутизна пеленгационной характеристики БИР,  - угловая чувствительность.
- угловая чувствительность.
Угол эквивалентного скручивания измерительной системы координат OY*X* относительно отсчетной OYX равен
 . (5.12)
. (5.12)
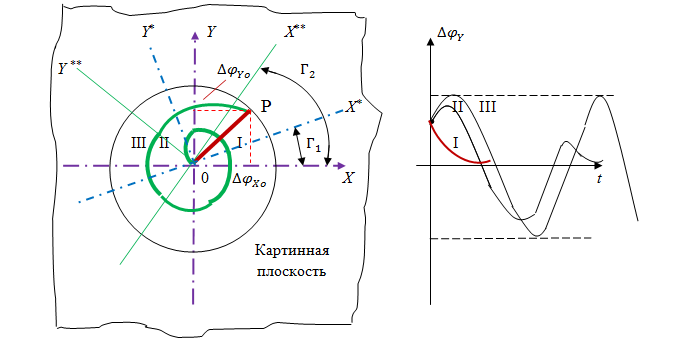
Рисунок 5.6 – Пояснение процесса скручивания координат
Связь между измеренными и фактическими отклонениями при наличии скручивания определяется соотношениями
 ,
,  . (5.13)
. (5.13)
Если представить себе ЛА в некоторый момент времени отклоненным от следа оси антенны РЛС на угол рассогласования ,т.е. находящимся в точке Р (рис.5.6) на картинной плоскости, ив этот момент включить систему управления, чтобы отработать начальное отклонение до нуля, то будет иметь место переходный процесс, соответствующий подаче скачка на вход системы. В отсутствие скручивания изображающая точка Р перейдет в начало координат по прямой ОР, причем отклонения в одной и другой плоскостях будут уменьшаться во времени апериодически и независимо друг от друга, как это представлено на рисунке для кривой I. Если угол скручивания Г не равен нулю, то контуры управления ЛА в обеих плоскостях окажутся связанными. Так сигналом ошибки, действующим на канал тангажа автопилота не будет отклонение , а будет измеренное отклонение  , соответствующее отклонению по наклонной оси OY*, а для канала рыскания -
, соответствующее отклонению по наклонной оси OY*, а для канала рыскания -  . Однако каналы тангажа и рыскания управляют движением ЛА в двух взаимно перпендикулярных плоскостях, соответствующих осям OY и OX в картинной плоскости. Следовательно, изменение вызовет регулирование по , а регулирование по - изменение обоих измеренных отклонений и , являющихся проекциями на осиOX* и OY*. Аналитически это может быть учтено при определении передаточных функций с использованием выражения (5.13).
. Однако каналы тангажа и рыскания управляют движением ЛА в двух взаимно перпендикулярных плоскостях, соответствующих осям OY и OX в картинной плоскости. Следовательно, изменение вызовет регулирование по , а регулирование по - изменение обоих измеренных отклонений и , являющихся проекциями на осиOX* и OY*. Аналитически это может быть учтено при определении передаточных функций с использованием выражения (5.13).
При  отображающая точка Р будет при согласовании двигаться в картинной плоскости по спирали, а отклонения в каждой из ортогональных плоскостей будут уменьшаться со временем по закону затухающего колебания (кривые II). При Г=45° связь между контурами управления ЛА приведет к потере устойчивости, так как изображающая точка Р будет двигаться после воздействия скачка по окружности, отклонение будет изменяться по закону незатухающих колебаний (кривая III), а ЛА в пространстве будет двигаться по винтовой линии вокруг равносигнальной линии.
отображающая точка Р будет при согласовании двигаться в картинной плоскости по спирали, а отклонения в каждой из ортогональных плоскостей будут уменьшаться со временем по закону затухающего колебания (кривые II). При Г=45° связь между контурами управления ЛА приведет к потере устойчивости, так как изображающая точка Р будет двигаться после воздействия скачка по окружности, отклонение будет изменяться по закону незатухающих колебаний (кривая III), а ЛА в пространстве будет двигаться по винтовой линии вокруг равносигнальной линии.
Явление скручивания координат является частным случаем расхождения между измерительной системой координат, в которой определяются измеренные отклонения, и исполнительной, в которой осуществляются управляющие воздействия.
Дата добавления: 2017-09-01; просмотров: 1704;
Поиск по сайту
Узнать еще
- I. Расчёт методом контурных токов.
- II. Расчёт методом суперпозиции.
- IV. Расчёт простых цепей постоянного тока методом эквивалентных преобразований сопротивлений.
- Алгоритм вычисления ПХ классическим методом
- Алгоритм вычисления ПХ операторным методом
- Алгоритм отделения корней методом последовательного перебора
- Алгоритм расчета переходного процесса классическим методом
- Алгоритм решения задач этим методом.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
