Комплекс управляемого снаряда и системы радиоуправления
Комплекс управляемого снаряда включает в себя средства обнаружения и опознавания целей, пункт управления (ПУ), пусковое устройство, сам снаряд и устройства системы управления.
Под системой управления понимают совокупность устройств на ПУ и снаряде, обеспечивающих управление движением снаряда и работой его бортовой аппаратуры. В состав системы управления входят как радиотехнические, так и нерадиотехнические устройства.
Если действие какой - либо системы управления (СУ) основано главным образом на применении радиоэлектронных устройств, ее называют системой радиоуправления или радиосистемой управления (РСУ). Главным образом РСУ применяются на этапе наведения.
РСУ могут быть системами автоматического регулирования (замкнутыми), либо разомкнутыми - автоматизированными.
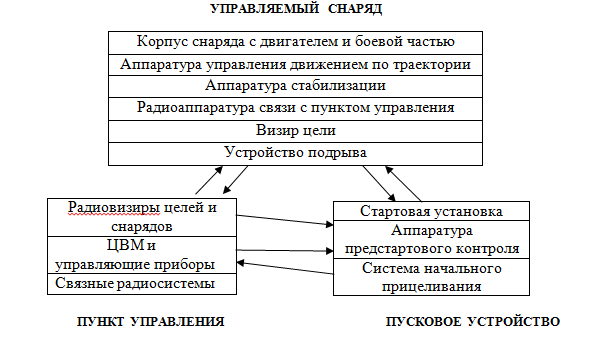
Рисунок 1.11 - Комплекс управляемого снаряда
РСУ с обратной связью могут быть следящими или корректирующими. В следящей системе процесс регулирования проходит непрерывно, т.е. для управления движением снаряда непрерывно измеряются и обрабатываются координаты цели и снаряда и непрерывно отрабатывается параметр рассогласования. В корректирующей системе процесс определения параметра рассогласования и его обработка разнесены во времени. Например, на каком-то отрезке времени измеряются координаты, скорости, ускорения и
т. д. цели и управляемого снаряда. Затем эти данные обрабатываются, определяется какая команда и в какое время должна быть отработана снарядом. Полученные величины (если их измерение производится не на борту) передаются с ПУ по каналу связи и запоминаются в бортовом устройстве. В нужный момент происходит отработка команды.
Пример разомкнутой системы – радиовзрыватель. При достаточном сближении снаряда с целью, что контролируется при помощи радиовизиров, с пункта управления на борт снаряда подается команда, разрешающая подачу питающих напряжений на схему радиовзрывателя.
РСУ является системой автоматического управления (САУ), имеющей несколько замкнутых контуров. Контур замкнутой СУ, определяющей движение ЛА по траектории – внешний контур, контур стабилизации – внутренний.
Еще до пуска снаряда в большинстве тактических ситуаций на ПУ применяются радиоэлектронные устройства для обнаружении и опознавания целей и определения параметров их движения (радиовизиры целей). Радиовизир цели может находится либо на борту снаряда, либо на пункте управления. В последнем случае необходима командная радиолиния, связывающая ПУ со снарядом. Цифровые вычислительные устройства, определяют момент и наивыгоднейшее направление пуска снаряда. Полученные данные используются для управления пусковым устройством, которое обеспечивает старт снаряда с необходимыми начальными параметрами. Пусковые устройства могут быть конструктивно объединены с пунктом управления, особенно в тех случаях, когда запуск снаряда производится с борта корабля или самолета-носителя. В системах стационарного типа пусковые устройства входят в состав стартовых позиций и часто бывают отдалены от ПУ на определенное расстояние. Через пусковое устройство осуществляется также ввод начальных данных в бортовые системы снаряда. Обычно пусковые устройства оборудуются аппаратурой, позволяющей проверить исправность основных агрегатов снаряда перед стартом.
После пуска вступает в работу система управления снарядом, обеспечивающая его стабилизацию и движение в соответствии заданным методом наведения.
Различают также следующие способы радиоуправления: командное (радиотелеуправление); радиотеленаведение; самонаведение; автономное радиоуправление. Каждый из способов радиоуправления далее будет нами рассмотрен подробно. Командное управление, в свою очередь, делится на командное радиоуправление первого, второго и третьего типов (КРУ-I , КРУ-II , КРУ-III).
Различным способам РУ соответствуют различные схемы внешних контуров (рисунок 1.12).

Рисунок 1.12 - Контура РСУ
В схеме на рисунке 1.12,б координаты цели измеряются непосредственно на снаряде. Для замыкания контуров необходимо кинематическое звено. Оно не связано с какой либо аппаратурой и является по сути уравнением, связывающим между собой координаты и параметры движения снаряда и цели.
При рассмотрении РСУ следует помнить о многоконтурности, а также о нелинейности СУ, ее нестационарности и дискретности.
Многоконтурность: наличие двух внешних контуров для управления в вертикальной и горизонтальной плоскостях, звено автопилот-снаряд имеет контур стабилизации, радиовизир содержит системы АСН, АСД, АПЧ, АРУ и т.д. Все системы взаимосвязаны и должны описываться единой системой уравнений высокого порядка.
Нелинейность связана прежде всего с ограниченностью максимальной величины поперечного ускорения снаряда.
Нестационарность особенно проявляется на участках разгона снаряда.
Дискретность возникает из-за работы ЦВМ, цифровых командных радиолиний, импульсных режимов работы радивизиров и т.п.
Лекция 2
Системы координат
Для рассмотрения последующего материала необходимо рассмотреть системы координат, используемые для описания движения снаряда, цели и пункта управления (если цель и пункт управления подвижны).
Перемещение всех трех объектов часто описывают в неподвижной земной декартовой системе координат 0xзyзzз.Заначало этой системы координат принимается какая-либо точка 0 на земной поверхности, ось yз направлена вертикально вверх, xз и
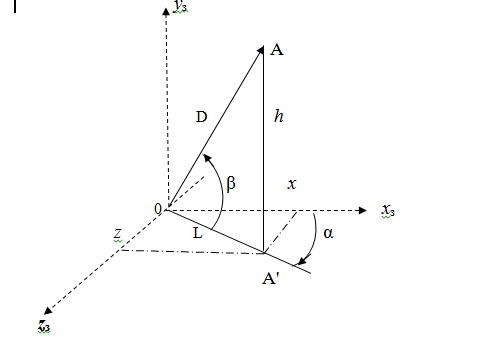
Рисунок 1. 13 – Земная система координат (прямоугольная)
zз лежат в плоскости местного горизонта неподвижно относительно земной поверхности. Положение центра тяжести ЛА в этой системе координат определяется высотой - h, горизонтальной дальностью - L и боковым отклонением - z.
Земной декартовой системе координат соответствует сферическая земная система координат, в которой положение объекта характеризуется наклонной дальностью D, углом места β, азимутальным углом α.
Если центр системы координат расположить на пункте управления или снаряде, а оси оставить параллельными осям земной системы координат, то получим земные системы координат, связанные соответственно с пунктом управления 0xзпyзпzзп и снарядом 0xз снyз снzз сн.
На рисунке 1.14 показана система координат, связанная со снарядом.
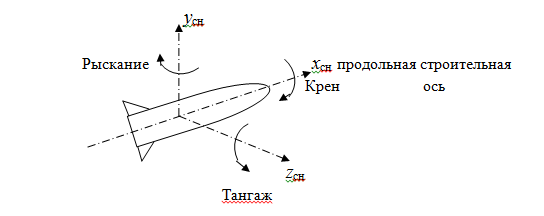
Рисунок 1.14 – Связанная подвижная система координат
Рассмотрим взаимосвязь «подвижной» системы координат, начало которой расположено в центре тяжести ЛА, с неподвижной земной системой. На рисунке 1.15 показаны проекции осей системы координат снаряда на плоскости земной системы координат, которые образуют с осями земной системы три угла: угол тангажа υ, угол крена γ, курсовой угол – ψ. Проекции вектора скорости  , определяющего траекторию движения ЛА, образуют с осями земной системы координат в вертикальной плоскости угол наклона траектории θ и в горизонтальной плоскости – путевой угол Ф. Углы между проекциями вектора скорости и проекциями осей ЛА на те же плоскости определяют угол атаки αа= υ- θ и угол скольжения βс= ψ- Ф.
, определяющего траекторию движения ЛА, образуют с осями земной системы координат в вертикальной плоскости угол наклона траектории θ и в горизонтальной плоскости – путевой угол Ф. Углы между проекциями вектора скорости и проекциями осей ЛА на те же плоскости определяют угол атаки αа= υ- θ и угол скольжения βс= ψ- Ф.
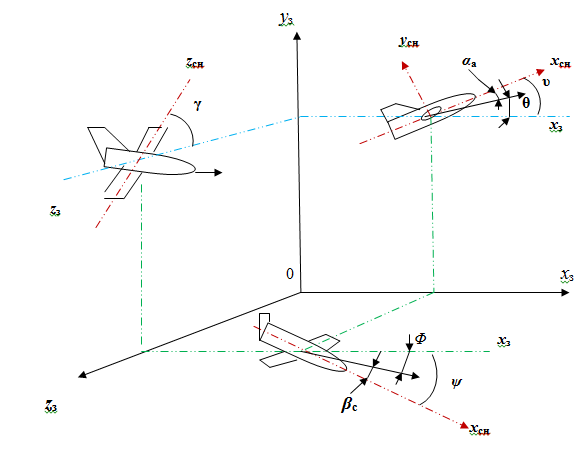
Рисунок 1.15 – Системы координат, используемые при управлении ЛА
Дата добавления: 2017-09-01; просмотров: 2372;
Поиск по сайту
Узнать еще
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ
- II. ЭЛЕКТРИЧЕСКИЙ ДИПОЛЬ. ДИПОЛЬНЫЙ МОМЕНТ СИСТЕМЫ ЭЛЕКТРИЧЕСКИХ ЗАРЯДОВ
- III. Избирательные системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
