Особенности аэродинамики рулевого винта (РВ)
Общие положения. Рулевой винт предназначен для уравновешивания реактивного момента несущего винта, обеспечения путевой управляемости и устойчивости.
Вращение несущего и рулевого винтов производится двигателями через редукторы и трансмиссию.
- Рис.12.15. Режимы обтекания НВ:
1 - снижение с небольшой вертикальной скоростью; 2 - режим вихревого кольца;
Окружные скорости вращения, жестко связанных между собой несущего и рулевого винтов примерно одинаковы, но частота вращения рулевого винта больше чем у несущего винта в 4-7 раз, так как диаметр рулевого винта соответственно во столько же раз меньше диаметра несущего винта.
Втулки рулевых винтов бывают различных типов, но у них отсутствуют вертикальные шарниры и устройства типа автомат перекоса, что вызывает на некоторых режимах полета дополнительные нагрузки на втулки рулевого винта и его трансмиссию.
Основными кинематическими параметрами определяющие аэродинамические силы и маховые движения лопастей являются угол установки лопастей jРВ, скорость полета uпол, угол скольжения bск и угловая скорость рыскания wу вертолета.
По сравнению с несущим винтом, рулевой винт имеет большой диапазон изменения углов установки лопастей. На вертолете Ми-8 МТВ-1, максимальный установочный угол лопастей РВ 230  , минимальный -6
, минимальный -6  , а угол изменения лопастей несущего винта составляет от 10 до 14045¢±30¢. Работа рулевого винта на висении.
, а угол изменения лопастей несущего винта составляет от 10 до 14045¢±30¢. Работа рулевого винта на висении.
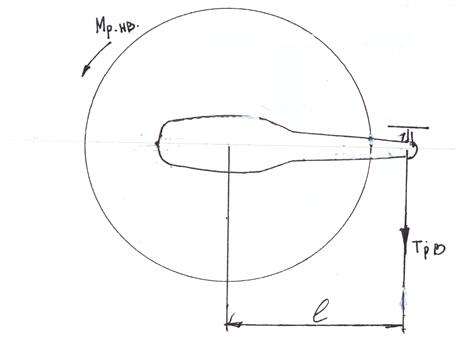
Основной расчетный режим рулевого винта – висение. На этом режиме рулевой винт работает в режиме осевого обтекания и создает максимальную силу тяги, необходимую для уравновешивания реактивного момента несущего винта.
МР.В.=ТР.В.l (12.19.)
где l – расстояние от центра масс вертолета до втулки рулевого винта (рис. 12.17).
В этом случае для уравновешивания реактивного момента несущего винта, с учетом аэродинамических потерь РВ и потерь на трение, необходимо затратить 8-10% мощности двигателей.
.
Рис.12.17. Схема уравновешивания реактивного момента несущего винта
Сила тяги рулевого винта определяется по тем же формулам, что и для несущего винта, и зависит от тех же параметров.
 (12.20.)
(12.20.)
где Сm. – коэффициент тяги РВ характеризует аэродинамические свойства данного рулевого винта и зависит от коэффициента заполнения рулевого винта, формы лопастей и их профиля и раскрывает зависимость тяги рулевого винта от угла атаки лопастей Р.В. - α.
В зависимости от увеличения Сm (тяги рулевого винта) изменяется крутящий момент и мощность, потребная для вращения рулевого винта. При изменении установочного угла j (соответственно и угла атаки РВ - a) меняется и потребная мощность идущая на вращение рулевого винта. Эта мощность отбирается от несущего винта и это может привести при большом увеличении j, к падению частоты вращения несущего винта и снижению вертолета при постоянном шаге НВ.
Сила тяги рулевого винта пропорциональна квадрату частоты вращения несущего винта или рулевого винта, так как оба винта жестко связаны между собой хвостовой трансмиссии. Реактивный момент несущего винта, при постоянной мощности двигателей, обратно пропорционален частоте вращения w.
 (12.21.)
(12.21.)
Уменьшение частоты вращения НВ w вызывает увеличение реактивного момента несущего винта, это вызывает увеличение потребного угла установки j рулевого винта для увеличения атаки α и тяги РВ, необходимой для компенсации увеличенного реактивного момента НВ. Это потребует отбора дополнительной мощности от несущего винта. Таким образом, потребная тяга рулевого винта на висение и запас путевого управления зависит от полетной массы, температуры, плотности наружного воздуха, частоты оборотов несущего винта, направления ветра и угла установки несущего винта. НВ. Влияние ветра на работу РВ на висении.
Сила ветра и его направление относительно строительной оси вертолета оказывают значительное влияние на потребную мощность и тягу рулевого винта.
При увеличении скорости бокового ветра до 10 м/сек слева, сила тяги рулевого винта уменьшается примерно на 20%, а при ветре справа – почти в 1,5 раза по сравнению со штилевыми условиями.
Уменьшение силы тяги рулевого винта при боковом ветре обусловлено следующими причинами:
- при ветре слева уменьшаются углы атаки лопастей, а значит и сила тяги рулевого винта. Для поддержания потребной тяги, необходимой для уравновешивания реактивного момента несущего винта Nреак., требуется увеличить установочный угол j лопастей рулевого винта (правая педаль вперед). Несмотря на это, мощность, потребная для вращения рулевого винта, почти не меняется, так как в процессе восстановления путевого равновесия уменьшение угла атаки элементов лопастей от бокового ветра компенсируется увеличением углов установки лопастей примерно на такую же величину и они работают на тех же углах атаки, что и при висении в штиль;
- при ветре справа тяга рулевого винта, лопасти которого работают на больших углах атаки, также уменьшается вследствие выхода части сечений лопасти на закритические углы атаки и расширения срывных зон на ометаемой площади рулевого винта. Работа на больших углах атаки и зоны срыва резко увеличивает индуктивное сопротивление лопастей, а стало быть, и мощность потребную на вращение рулевого винта. Отбор этой мощности с несущего винта, приводит к падению частоты вращения НВ и к снижению вертолета в случае висения с предельной взлетной массой.
При попутном ветре на висении вертолет неустойчив в путевом отношении и стремится, как правило, развернуться влево. На висении в зоне влияния воздушной подушки вихрь, образованный взаимодействием потока несущего винта и ветра создает условия, в которых толкающий рулевой винт, верхняя лопасть которого набегает на хвостовую балку, (Ми-8Т, Ми-2) теряет часть тяги вследствие уменьшения относительной скорости обтекания лопастей и образования срыва потока.
При висении с попутным ветром на этих вертолетах требуется увеличение потребного отклонения вперед правой педали. При измененном направлении вращения рулевого винта (МИ-8 МТВ-1) увеличиваются запасы по ходу правой педали при висении с правым и попутным ветром.
Развороты на висении.
При развороте вертолета вправо, требуется дополнительная мощность потребная на вращение рулевого винта, вследствие увеличения углов атаки лопастей и увеличения их индуктивного сопротивления. Эта мощность снимается с несущего винта и при неизменном угле установки лопастей НВ вертолет снижается. При развороте влево уменьшаются углы атаки и индуктивное сопротивление лопастей рулевого винта. Потребная мощность на вращение РВ тоже уменьшается, избыток мощности передаётся на несущий винт и вертолет набирает высоту.
При развороте вправо вертолет устойчив, т.е. следует за перемещением педали вправо, при развороте влево вертолет неустойчив, так как стремится увеличить угловую скорость вращения без дальнейшего перемещения педали влево. В случае разворота, угловая скорость перемещения втулки РВ создает на большом плече LРВ дополнительную осевую скорость обдувки лопастей, что на малых угловых скоростях wу создает демпфирующий момент направленный против разворота вертолета, а при больших wу, может привести к попаданию рулевого винта в режим «вихревого кольца» и входу вертолета в неуправляемый разворот влево.
При развороте вертолета в любую сторону возрастают маховые движения лопастей рулевого винта, что вызывает увеличение амплитуды переменных изгибающих моментов в комлевых участках лопастей. Кориолисовы силы от маховых движений нагружают комлевые части лопастей знакопеременными изгибающими моментами в плоскости вращения рулевого винта. В основном эти моменты определяют динамическую прочность и ресурс лопастей.
Работа рулевого винта в горизонтальном полете.
В горизонтальном полете рулевой винт создает силы и моменты, как и несущий винт при косой обдувке, но эти моменты значительно меньше, чем на несущем винте вертолета. Сила тяги рулевого винта меняется в зависимости от условий горизонтального полета. С увеличением скорости полета за счет увеличения массы воздуха перетекающего через рулевой винт за единицу времени, сила тяги рулевого винта возрастает без подвода дополнительной мощности.
Для сохранения путевого равновесия в горизонтальном полете с увеличением скорости требуется уменьшать установочный угол лопастей рулевого винта, вследствие чего уменьшаются углы атаки лопастей и уменьшается потребная мощность необходимая для вращения рулевого винта. Увеличение скорости горизонтального полета вертолета вызывает увеличение амплитуды махового движения лопастей и уровня их динамического нагружения в плоскости вращения рулевого винта, соответственно возрастают нагрузки на трансмиссию рулевого винта. Особенно велики эти нагрузки на больших скоростях при маневрах по курсу. В горизонтальном полёте индуктивный поток несущего винта несущего винта сносится на рулевой винт, увеличивая результирующую скорость обтекания лопастей рулевого винта, что способствует повышению аэродинамической эффективности рулевого винта.
Вихревая пелена от несущего винта усиливает динамическое нагружение рулевого винта. Это нагружение зависит от расстояния центра втулки рулевого винта до осевой линии вихревой пелены несущего винта.
При нахождении втулки рулевого винта в середине вихревой пелены несущего винта динамические нагрузки на лопасти в 1,5 – 2 раза больше, чем при работе изолированного винта. При опускании втулки рулевого винта ниже осевой линии вихревой пелены динамические нагрузки на лопасти рулевого винта возрастают.
С точки зрения уменьшения динамических нагрузок на рулевой винт и для улучшения условий поперечной балансировки вертолета, рулевой винт располагают ближе к плоскости вращения несущего винта, хотя это нерационально с точки зрения конструкции и весовой отдачи вертолета.
Таким образом, рулевой винт в отличие от несущего винта имеет ряд существенных аэродинамических особенностей, некоторые из которых, несмотря на богатый опыт эксплуатации вертолетов, в настоящее время еще недостаточно изучены.
Литература.
1. Алаян О..М. и др. Аэродинамика и динамика полета вертолета. М.
В14М0, 1973.
2. Аристидов Ю.Б. Особенности пилотирования вертолетов в условиях сложного рельефа подстилающей поверхности. Л. ОЛАГА, 1980.
3.. Аронин Г.С. Практическая аэродинамика. М.ВИМО СССР, 1962.
4. Базов Д.И. Аэродинамика вертолетов. М. Транспорт, 1972.
5. Баранов А.М. Солонин С.В. Авиационная метеорология. Ленинград. Гидрометеоиздат. 1981.
6. Бочкарёв А.Ф. и др Аэромеханика самолёта. М. Машиностроение. 1977. 7.Володко А.М. Основы аэродинамики и динамики полета вертолетов. М. Транспорт, 1988.
8. Ефимов А.Н. Основы теории плёта самолёта. М. ВИМО СССР, 1957. 9. Кокунина Л.Х. Основы азродинамики. М. Транспорт, 1982.
10.Левинсон Я.И. аэродинамика больших скоростей. М Оборонгиз. 1948. 11.Мельников А.П. Аэродинамика больших скоростей. М. ВИМО СССР,
1961.
12. Николаев Л.Ф. Основы аэродинамики и динамики полета транспортных самолетов. М. Транспорт, 1997.
13. Мхиторян А.М. Аэродинамики. М. Машиностроение, 1970.
14. Петров К.П. Аэродинамика элементов летательных аппаратов. М. Машиностроение, 1985.
15. Ромасевич В.Ф. и др. Практическая аэродинамика вертолетов. М. Воениздат, 1980.
16. Тотиашвили Л.У. и др. основы аэродинамики и динамики полета транспортных самолетов. Рига, 1971.
17. Филиппов В.В. и др. Аэродинамики и динамика полета транспортных самолетов с ДТРД и ТВД. М. Воениздат, 1981.
18. Шифрин М.Н. Практическая аэродинамика самолёта Ан-2.
Артемьев В.Л.
Дата добавления: 2017-06-13; просмотров: 5112;
Поиск по сайту
Узнать еще
- I. ОСОБЕННОСТИ ДЕЛОВОГО И ЛИЧНОСТНОГО ОБЩЕНИЯ В СОВМЕСТНОЙ ДЕЯТЕЛЬНОСТИ
- I.2. Основные категории водопотребления промышленных предприятий и их особенности
- I2. Особенности аэродинамики несущего винта (НВ)
- II. Завоевание Китая маньчжурами. Экономическое положение страны в XVII – начале XIX вв.: аграрная политика Цинской династии, особенности развития городского ремесла
- II. Особенности политического устройства Ирана
- II. Особенности развития турецкой буржуазии. Становление младотурецкого движения
- II. РЕЖИМ И ОСОБЕННОСТИ ЛИЧНОЙ ГИГИЕНЫ
- III. Особенности политической элиты России.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
