Модели в пространстве состояний
Для того, чтобы было легче исследовать модель объекта, желательно привести ее к некоторому стандартному виду, для которого уже есть готовые общие решения. Таким «стандартом» в теории управления считается система дифференциальных уравнений первого порядка, которая называется нормальной формой Коши.
Рассмотрим снова модель электродвигателя, считая, что MH(t)=0 (нагрузки нет). Вспомнив, что  , можно записать (2) в виде системы
, можно записать (2) в виде системы
 .
.
Эта система дифференциальных уравнений первого порядка быть записана в матричной форме
 . (3)
. (3)
Значения θ(t) и ω(t) определяют состояние двигателя в момент времени t . Это значит, что зная их значения в некоторый момент времени t0 и входной сигнал u(t) при всех t ≥ t0 можно рассчитать поведение объекта для любого последующего момента. При этом предыдущие значения θ(t) , ω(t) и u(t) (при t < t 0) не играют никакой роли. Поэтому θ(t) и ω(t) называются переменными состояния, а вектор  - вектором состояния.
- вектором состояния.
В теории управления принято обозначать вектор состояния через x(t), вход объекта (сигнал управления) – через u(t) . Тогда модель (3) может быть записана в виде
 , (4)
, (4)
где  ,
,  ,
,  . Модель (4) связывает вход u(t) и вектор состояния x(t) , поэтому она называется моделью вход-состояние.
. Модель (4) связывает вход u(t) и вектор состояния x(t) , поэтому она называется моделью вход-состояние.
Полная модель объекта в пространстве состояний содержит еще одно уравнение – уравнение выхода, которое показывает, как формируется выход объекта y(t)
 , (5)
, (5)
Эта модель называется моделью вход-состояние-выход. Выходная координата для двигателя постоянного тока – это угол поворота вала
 ,
,
так что  и D=0. Если же в качестве выхода принять угловую скорость, то
и D=0. Если же в качестве выхода принять угловую скорость, то  .
.
С помощью модели (5), изменяя матрицы C и D, можно принять за выход любую линейную комбинацию переменных состояния и входа. Во многих практических задачах выход – это одна или несколько переменных состояния, которые мы можем измерить.
Поскольку момент инерции J , сопротивление якоря R и коэффициенты k1 и k2 не зависят от времени, матрицы A, B, C и D в модели (5) – постоянные. Такие объекты называются стационарными, в отличие от нестационарных объектов, параметры которых изменяются во времени.
Запись моделей в единой форме (5) позволяет отвлечься от смысла переменных состояния и исследовать системы разной природы стандартными методами, которые хорошо разработаны и реализованы в современных компьютерных программах.
Пример, как уравнения вида (5) могут быть решены и чем удобна именно такая форма записи. Предположим, что известны начальные условия, то есть вектор состояния x(0) при t = 0. Знание x(0) и входа u(t) при всех t > 0 дает возможность однозначно определить дальнейшее поведение этого объекта.
Первое уравнение в (5) позволяет найти производную, то есть, скорость изменения вектора состояния x(t) в любой момент времени. Будем считать, что при 0 ≤ t ≤ Δt , где Δt – малый интервал времени, эта производная не меняется. Тогда значение вектора состояния при t = Δt приближенно определяется формулой
 ,
,
то есть, его можно легко вычислить. Зная x(Δt) и сигнал управления u(Δt) , находим выход системы в тот же момент
 .
.
Таким образом, можно (приближенно) рассчитать выход системы при всех t > 0 . Конечно, точность будет тем выше, чем меньше Δt , однако объем вычислений при этом также увеличится. Этот метод приближенного решения дифференциальных уравнения называется методом Эйлера. Так как не делается никаких предположений о постоянных матрицах A , B , C и D, его (как и другие, более совершенные методы) можно использовать без изменений для решения любых уравнений вида (5).
Переходная функция
Один из методов построения моделей «вход-выход» – определение реакции объекта на некоторый стандартный сигнал. Один из простейших сигналов – так называемый «единичный скачок» («единичный ступенчатый сигнал»), то есть мгновенное изменение входного сигнала с 0 до 1 в момент t = 0 . Формально этот сигнал определяется так
 .
.
Реакция объекта на единичный скачок называется переходной функциейи обозначается h(t)
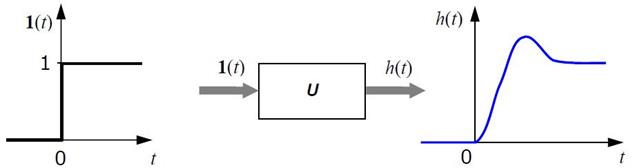
Рисунок 3.2 – График переходной функции h(t)
При этом предполагается, что объект в начальный момент находится в состоянии покоя, то есть, имеет нулевые начальные условия. Это значит, что все его переменные состояния равны нулю и внутренняя энергия также нулевая.
Если начальные условия ненулевые, то для построения сигнала выхода при любом входе нужно использовать дифференциальные уравнения объекта или модель в пространстве состояний. Это значит, что переходная характеристика дает меньше информации, чем исходные уравнения.
Пусть модель объекта задана дифференциальным уравнением первого порядка
 , (6)
, (6)
где k – безразмерный коэффициент, а T – некоторая постоянная, которая имеет размерность времени (измеряется в секундах). Найдем переходную характеристику этого звена. Решая уравнение (6) при x(t) = 1 (t > 0), получаем
 ,
,
где постоянная C1 должна определяться из начальных условий. Поскольку нас интересует переходная характеристика, начальные условия считаем нулевыми, то есть y(0) = 0, что дает C1 = −k и поэтому
 . (7)
. (7)
На рисунке показаны переходные характеристики (7) при различных значениях параметра T, который называется постоянной временизвена
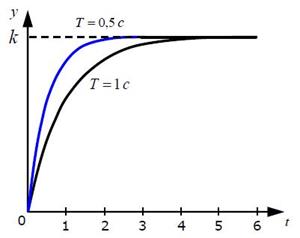
Рисунок 3.3 – Переходные характеристики
Видно, что при увеличении T выход y медленнее достигает установившегося значения, равного k, то есть постоянная времени характеризует инерционность звена (6). Чем больше постоянная времени, чем медленнее реагирует объект на управление и тем больше усилий нужно для того, чтобы перевести его в новое состояние.
Заметим, что ступенчатый сигнал легко получить на практике, поэтому переходную характеристику можно снять экспериментально.
Дата добавления: 2017-05-02; просмотров: 3277;
Поиск по сайту
Узнать еще
- V. Исследование зрительного и зрительно-пространственного гнозиса
- А) пространственная структура.
- А) Расчет рамы в системе пространственного блока при
- А. Аналитические модели.
- А. Модели экономического прогноза на базе производственных функций.
- Автоматизация технологического проектирования. Основные задачи и модели автоматизации технологического проектирования
- Автоматизация ТП. Моделирование техпроцесса.
- АВТОРСКИЕ МОДЕЛИ ПСИХОЛОГИЧЕСКОЙ СЛУЖБЫ, ИЛИ КАК ОБРЕСТИ СВОЕ ЛИЦО

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
