Приведение статических и динамических нагрузок к валу двигателя
Обычно двигатель приводит в действие производственный механизм через систему передач, отдельные элементы которой движутся с различными скоростями.
Механическая часть электропривода может представлять собой сложную кинематическую цепь с большим числом движущихся элементов.
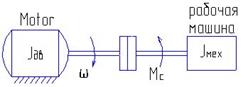 Расчетную схему механической части привода можно свести к одному обобщенному жесткому механическому звену, имеющему эквивалентную массу с моментом инерции J, на которую воздействует электромагнитный момент двигателя М и суммарный приведенный к валу двигателя момент сопротивления (статический момент) Мс, включающий все механические потери в системе, в том числе механические потери в двигателе.
Расчетную схему механической части привода можно свести к одному обобщенному жесткому механическому звену, имеющему эквивалентную массу с моментом инерции J, на которую воздействует электромагнитный момент двигателя М и суммарный приведенный к валу двигателя момент сопротивления (статический момент) Мс, включающий все механические потери в системе, в том числе механические потери в двигателе.
Рассмотрим методы приведения различного вида движения к такой двухмассовой модели.
wдв=wрм.
Различны: J1, J2, …, Jn; m1, m2, …, mk;
w1, w2, …, wn; v1, v2, …, vk.
Общим принципом приведения нагрузок к валу двигателя является закон сохранения энергии (кинетической и потенциальной).
Закон сохранения энергии:
Dt – интервал времени подъема.

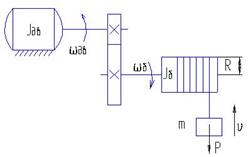
 , где Р – вес груза; R – радиус обработки; i – передаточное число редуктора.
, где Р – вес груза; R – радиус обработки; i – передаточное число редуктора.
 - радиус приведения.
- радиус приведения.
Приведение моментов инерции – это приведение динамических нагрузок к валу двигателя.
При приведении динамических нагрузок определяем приведенный момент инерции механизма из условия сохранения кинетической энергии в приведенных массах, равной энергии движущихся частей рабочей машины.
 , но
, но  и
и  , тогда
, тогда 
Таким образом, Jдв>>Jпр.
Дата добавления: 2017-05-02; просмотров: 1667;
Поиск по сайту
Узнать еще
- III. Схема замещения и векторная диаграмма асинхронного двигателя
- U – образные и рабочие характеристики синхронного двигателя
- VII. Регулирование частоты вращения двигателя
- Анализ динамических процессов систем управления
- Анализ основных параметров поршневого двигателя.
- АНАЛИЗ ОТКАЗОВ ДВИГАТЕЛЯ ПРИ СТЕНДОВЫХ ИСПЫТАНИЯХ
- АНАЛИЗ РЕЗУЛЬТАТОВ ГИДРОДИНАМИЧЕСКИХ ИССЛЕДОВАНИЙ ГОРИЗОНТАЛЬНЫХ СКВАЖИН
- Аналого-цифровые преобразователи: назначение, ошибки преобразования, способы уменьшения динамических ошибок преобразования. Виды АЦП, сравнительная оценка.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
