Функциональная схема управления электродвигателем постоянного тока с помощью микропроцессора
Рассмотрим структурную схему простейшего устройства управления электроприводом с помощью микропроцессора (рис. 9.2.2). Двигатель М питается от тиристорного преобразователяТП, который управляется от микропроцессора
МП. Звено БС — блок согласования (интерфейс) МП иТП.
Изменение скорости двигателя во время пуска контролируется с помощью датчика тока ДТ и датчика частоты вращения ДЧВ. В качестве ДЧВ используется тахогенератор.
Аналоговые выходные сигналы ДТ и ДЧВ с помощью аналого-цифровых преобразователей АЦП превращаются в цифровые данные, которые подаются в МП.
Внешние органы управления (кнопки, датчики) воздействуют через УВВ и ЗУ на МП, который обеспечивает разгон двигателя по требуемому закону. В случае необходимости закон пуска двигателя может быть изменен путем замены программы в ПЗУ микропроцессора.
Всесоюзным научно-исследовательским институтом релестроения {ВНИИР) разработано универсальное устройтво управления с программируемой логикой (УЛП).
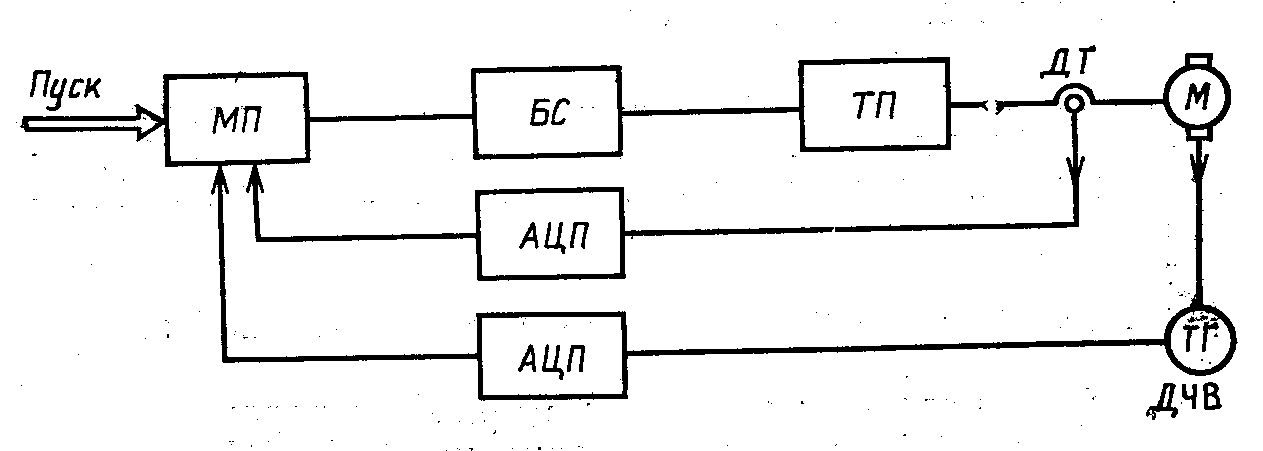
Рис. 9.2.2. Функциональная схема уцравления двигателем постоянного тока с помощью микропроцессора
Это устройство предназначено для замены существующего релейного оборудования систем управления с разветвленной логикой. УЛП состоит из следующих функциональных узлов: блока входов, блока управления, блока выходов, блока питания, пульта записи, пульта контроля.
Блок входов предназначен для сопряжения входных сигналов с уровнем логических сигналов блока управления, гальванической развязки между ними и выбора опрашиваемого входа.
Блок управления служит для логической обработки входных и получения выходных сигналов, опроса входных каналов и посылки информации в выходные каналы по программе, записанной в постоянной памяти.
Блок выходов служит для усиления мощности выходных логических сигналов до уровня, необходимого для срабатывания исполнительных устройств, гальванической развязки между логическими и силовыми сигналами, выбора адресуемого выхода и хранения состояния выходов в периоды между обращениями к ним.
Блок питания преобразует трехфазное переменное напряжение сети в постоянное напряжение, необходимое для питания всех блоков. :
Принцип действия УЛП заключается в следующем. Блок управления производит опрос блока входов и обрабатывает полученные данные в соответствии с программой, заложенной в его запоминающем устройстве. Полученные данные посылаются в выходное устройство, которое воздействует на исполнительные аппараты. По существу УЛП является электронной управляющей машиной. Изменение программы УЛП
производится путем замены кассеты в блоке управления. Конструктивно блоки управления, входа, выхода выполнены в виде унифицированных легкосъемных кассет. Наибольшее число входов и выходов УЛП составляет 1024. Блок выходов имеет герконовые или оптоэлектронные развязки. Длина команды 1 и 2 байт (8 или 16 разрядов в слове). Длина информационного слова 4 бита. Количество команд 42. Объем постоянной памяти 8192 байта. Время опроса 1 К памяти 5 мс. Объем оперативной памяти 4 Кбит.
Применение микропроцессоров и управляющих вычислительных машин в схемах автоматического управления является прогрессивным по всем показателям, и следует ожидать самого широкого применения их в электрических аппаратах.
ЛЕКЦИЯ № 31
9.3. Полупроводниковые и гибридные электрические аппараты
9.3.1. Общие сведения.
9.3.2. Реле тока с выдержкой времени, зависящей от тока.
9.3.3. Реле защиты от замыкания на землю.
9.3.4. Реле защиты асинхронных двигателей.
9.3.5. Трёхфазные реле напряжения.
9.3.6. Полупроводниковые реле времени.
9.3.7. Цифровые реле времени.
9.3.8. Применение оптоэлектронных приборов в электрических аппаратах
Общие сведения
Полупроводниковые реле в отношении быстродействия, чувствительности, селективности и надежности превосходят электромагнитные. В ряде случаев полупроводниковые реле обладают характеристиками, которые невозможно получить с помощью электромагнитных реле.
Полупроводниковые реле защиты содержат измерительный орган и логическую часть. В измерительном органе непрерывные входные величины преобразуются в
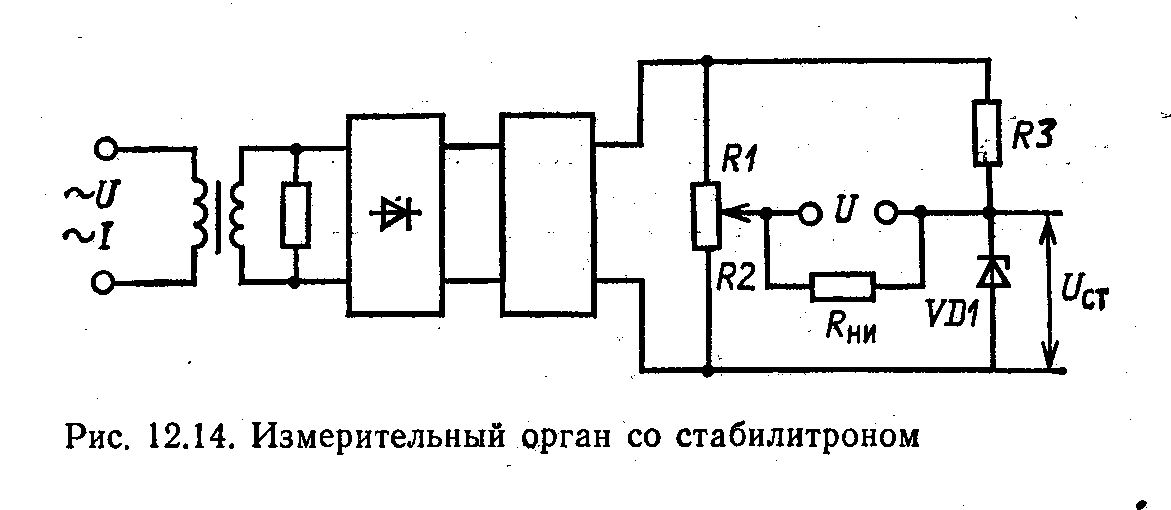
Рис.9.3.1. Измерительный орган со стабилитроном
дискретный выходной сигнал. Дискретный выходной сигнал поступает на вход логической части, выдающей управляющий сигнал чаще всего на электромагнитное реле.
Измерительный орган полупроводникового реле обычно имеет на входе трансформатор тока, нагруженный на малое активное сопротивление. Напряжение на сопротивлении пропорционально первичному току в контролируемой сети.
В измерительных органах используются следующие три принципа:
1) сравнение однородных физических величин, например напряжений. В момент равенства измеряемого и опорного напряжений на выходе появляется нулевой сигнал, который приводит к срабатыванию нуль-органа. На выходе появляется дискретный сигнал. Регулируя опорное напряжение, можно менять уставку срабатывания. Реализация такого принципа показана на рис. 9.3.1. Выпрямленный сигнал, пропорциональный напряжению или току, подается на мост R1, R2, R3, VD1. В момент равенства напряжений на R2 и VD1 на выходе моста появляется нулевой сигнал, который приводит в действие нуль-орган. Главным источником погрешности полупроводниковых реле является зависимость
параметров полупроводниковых приборов от температуры. Поэтому в схемы вводится температурная компенсация. В данной схеме для температурной компенсации последовательно со стабилитроном VD1 включается в прямом направлении диод. С ростом температуры у стабилитрона падение напряжения растет, а у диода в проводящем направлении падает;
2) проявление физического эффекта, возникающего при определенном значении измеряемого напряжения, — скачок в нелинейной характеристике туннельного диода, релейная характеристика триггера Шмидта и др.;
3) преобразование непрерывного входного сигнала и опорного напряжения в цифровую форму. После этого производится сравнение входного сигнала с опорным напряжением. Обработка входного сигнала в цифровой форме может производиться по требуемому алгоритму вычислительного устройства. Последний принцип наиболее перспективен ввиду высокой универсальности и стремительного развития вычислительной техники.
Функциональная схема трехфазного полупроводникового реле тока представлена на рис. 9.3.2. Пропорциональные токам напряжения трех фаз подводятся к промежуточным трансформаторам Т1—ТЗ. Между первичной и вторичной обмотками установлен экран. На выходе трансформаторов включены нелинейные резисторы. Эти мероприятия защищают усилители ОУ от перенапряжений. Сигнал со вторичных обмоток трансформаторов, пропорциональный контролируемому току, подается на входы ОУ А1—A3. На эти же усилители подается опорное напряжение с резистора R. Входные и опорные напряжения сравниваются между собой. При их равенстве на выходе усилителей А1—A3 появляется выходной сигнал, который через элемент ИЛИ, блок расширения импульса А5 и оконечный усилитель А4 подается на исполнительный opгaн. В блоке А5 кратковременный импульс преобразуется в импульс большей длительности. Светоизлучающие диоды VDI—VD3 сигнализируют о фазе, в которой произошла перегрузка.
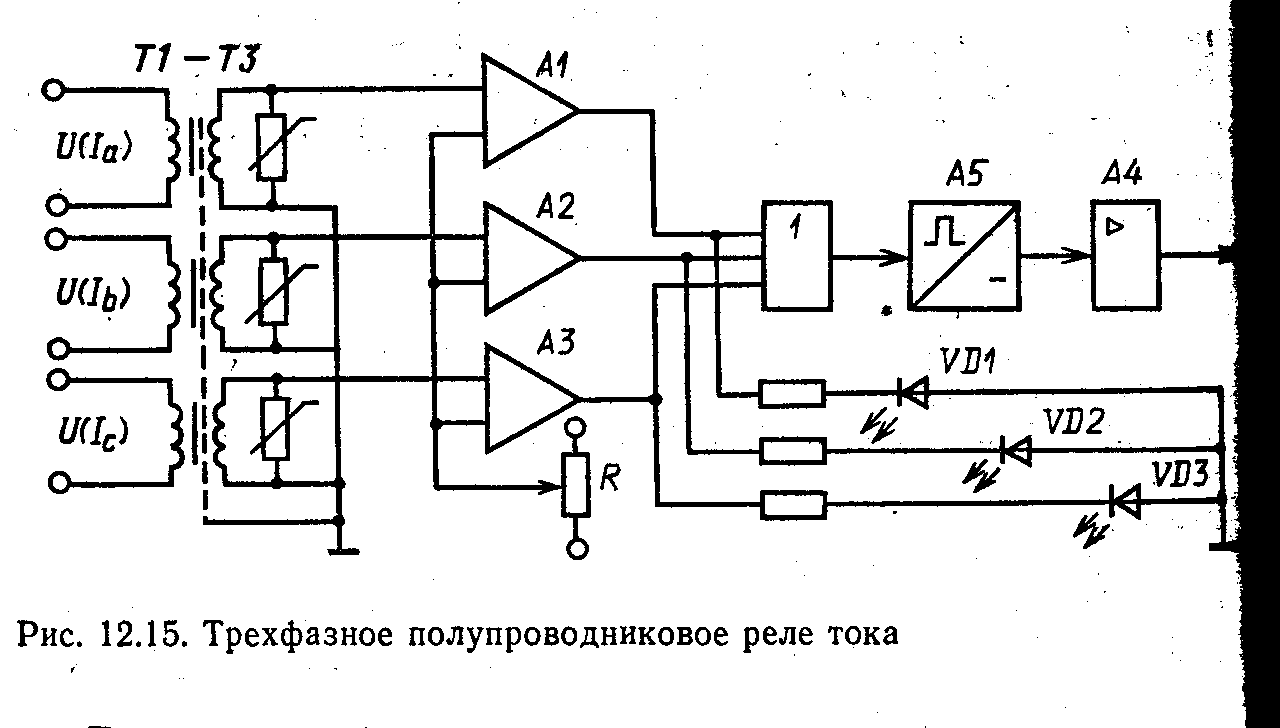
Рис. 9.3.2. Трёхфазное полупроводниковое реле тока
Для того чтобы схема не реагировала на кратковременные и безопасные для защищаемой цепи перегрузки, вводится выдержка времени (рис.9.3.3). Для этого один сигнал с элемента ИЛИ подается на элемент И непосредственно, второй— с выдержкой времени, определяемой цепочкой R1, C1. Сигнал на выходе реле появляется только тогда, когда на элемент И придут оба сигнала.
Дата добавления: 2017-05-02; просмотров: 3143;
Поиск по сайту
Узнать еще
- A Схема затяжки болтов ГБЦ; болты 5 и 7 длиннее остальных и устанавливаются в свои места
- C помощью микроскопа
- CRM - стратегия управления взаимоотношениями с клиентом
- I. Способы представления переменного синусоидального тока и напряжения.
- I. Установка для исследования сдвига фаз колебаний силы тока и напряжения с помощью компьютера и осциллографа-приставки
- II. В сравнении с другими органами управления, функционирующих на профессиональной основе
- II. Политическая карта Востока к началу XVII в.
- II. Электрическая схема и принцип действия.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
