Основные требования к авторулевым.
Автоматическим рулевым (авторулевым) называют прибор, предназначенный для автоматического управления рулевым приводом с целью удержания судна на заданном курсе. Авторулевые относятся к оборудованию судов, на которое распространяются требования Международной конвенции по охране человеческой жизни на море ( SOLAS-74 ).
К основным требованиям относятся следующие:
1. авторулевой должен удерживать судно на курсе:
ü с точностью ±1º при скорости не менее 6 узлов;
ü при амплитуде рыскания не более 1º при состоянии моря до 3 баллов и 4º - до 5 баллов;
2. авторулевой должен иметь устройство, прекращающее кладку пера руля при 35º на каждый борт;
3. должна быть световая сигнализация о наличии питания в схеме;
4. должна быть световая сигнализация об используемом виде управления;
5. должна быть световая и звуковая сигнализация о перегрузке рулевого привода;
6. рекомендуется иметь звуковую сигнализацию о недопустимых отклонениях от заданного курса при автоматическом управлении;
7. система управления авторулевым должна быть самосинхронизирующейся, т.е. исключать дополнительные действия при переходе с одного вида управления на другой;
8. на пульте авторулевого должно быть простое и надёжно действующее устройство для ручного управления рулём в виде штурвала или кнопочного поста управления с кнопками «Лево», «Право»;
9. переход с автоматического управления на ручное должен осуществляться одной манипуляцией в течение не более 3 с при любом положении руля;
10. в авторулевых рекомендуется иметь устройство, которое при автоматическом управлении позволяет изменять курс по крайней мере на ±10º без перехода на ручное управление;
11. в авторулевых рекомендуется иметь 2 выносных поста управления, позволяющих при автоматическом управлении выполнить экстренный поворот на любой угол, вплоть до полной циркуляции;
12. пульт автоматического и ручного управления должен находиться в диаметральной плоскости
судна, чтобы исключить его влияние на магнитный компас;
13. выносные пульты управления должны находиться на крыльях мостика или в других местах, удобных для немедленного перехода на управление с этих постов.
Системы управления рулевыми электроприводами.
Основные сведения.
Ниже рассматриваются три характерных системы управления рулевыми электроприводами:
1. простого управления, при помощи кнопок «Лево руля», «Право руля»;
2. следящего управления, при помощи штурвала;
3.автоматического управления;
Правила технической эксплуатации РЭП. Основные положения.
Перед выходом судна в море необходимо выполнить следующее:
1. убедиться в исправном состоянии РЭП;
2. проверить внешним осмотром исправность указателей и ограничителей перекладки;
3. измерить сопротивление изоляции электрооборудования;
4. включить РЭП и опробовать его в действии путем перекладки руля с бора на борт. При этом необходимо проверить исправность работы электрических машин, релейно-контакторной аппаратуры, ограничителей перекладки руля, рулевых указателей, звуковой и световой сигнализации.
Все неисправности, замеченные при проверке РЭП, ВРШ, РГП подлежат немедленному исправлению. Во время хода судна не реже одного раза в сутки проверка РЭП должна производиться ответственным персоналом МО. В сложных условиях плавания резервное электрооборудование РЭП должно быть готово к немедленному вводу в действие.
Замена работающих механизмов РЭП резервными может производиться только по согласованию с вахтенным помощником. При вводе резервного РЭП в действие сначала нужно включить его, а затем остановить работающий. Рекомендуется периодически переключать работающий и резервный РЭП.
Перед отключением РЭП руль должен быть установлен в диаметральную плоскость судна.
Во всех режимах плавания, включая сложные, необходимое число используемых РЭП определяется капитаном.
Авторулевой.
Перед выходом в рейс необходимо подготовить к действию авторулевой одновременно с подготовкой к действию РЭП. До начала проверки авторулевого помощником капитана должна быть выполнена проверка соответствия репитера-датчика авторулевого показаниям основного прибора гирокомпаса.
При подготовке авторулевого к действию необходимо:
а) осмотреть аппаратуру авторулевого;
б) измерять сопротивление изоляции;
в) произвести проверку работы авторулевого со всех постов управления в соответствии с инструкциями по эксплуатации при поочередной и совместной (где это допускается инструкцией) работе РЭП.
При переводе авторулевого с одного вида управления на другой, как правило, необходимо чтобы судно было на заданном курсе, а руль в диаметральной плоскости.
Коэффициент обратной связи и величина сигнала производной отклонения курса подбираются вахтенным помощником в зависимости от водоизмещения судна, скорости хода и состояния моря в соответствии с инструкциями по эксплуатации так, чтобы рыскание судна было наименьшим при минимальном числе перекладок руля. При увеличении волнения моря для снижения нагрузок на РЭП, уменьшения числа и длительности перекладок рекомендуется увеличивать значение КОС и уменьшать сигнал производной.
При длительном использовании авторулевого, а также при подходе судна к районам со сложными условиями плавания вахтенному помощнику необходимо проверять исправность действия РЭП в режиме управления “простой” и “следящий”.
При выполнении ТО технического обслуживания авторулевого необходимо:
а) произвести внешний осмотр аппаратуры;
б) установить переключатель видов управления в положение “автомат”;
в) произвести проверку работы авторулевого со всех постов управления в соответствии с инструкцией по эксплуатации при поочередно включаемых РЭП;
г) убедиться в отсутствии автоколебаний в системе авторулевого и принять возможные меры по их устранению, руководствуясь инструкцией по эксплуатации
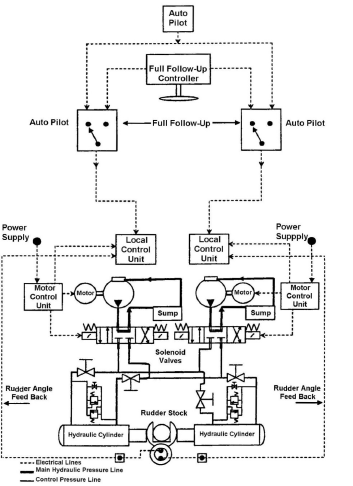
Схематическая диаграмма рулевого электро-гидравлического привода (РЭГП).
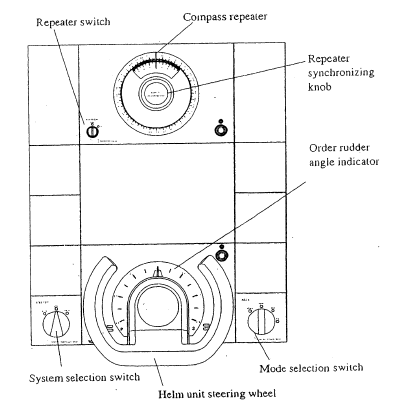
Лицевая часть колонки авторулевого.
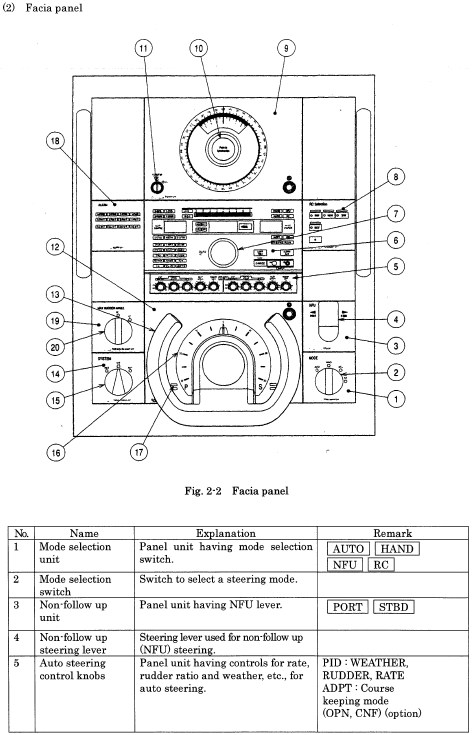
Описание элементов лицевой части авторулевого PR – 6000. (в таблице п.1- п.5)
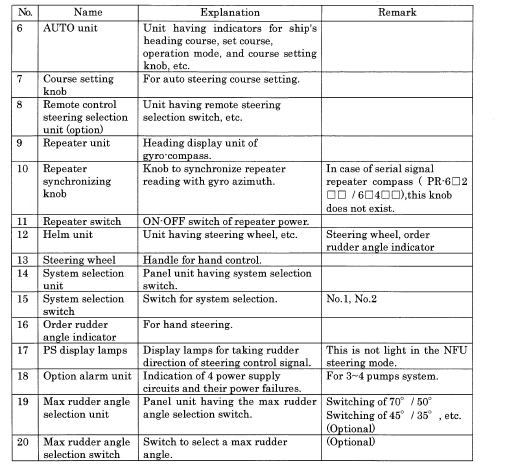
Описание элементов лицевой панели авторулевого PR – 6000. (п.6 – п.20)
Дата добавления: 2021-07-22; просмотров: 830;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- II. Основные положения
- II. Основные характеристики микроскопа.
- II. Языкознание и его основные разделы.
- III. Библиографическое описание документа. Общие требования и правила. ГОСТ 7.1-84
- III. Основные направления развития воспитания
- III. Основные требования к организации рассмотрения обращений граждан
- III. Основные функции ГФС России

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
