Расчет подвижности плоского механизма
Подвижностью механизма (или его числом степеней свободы) называется количество обобщённых (независимых) координат, которое должен иметь механизм для того, чтобы все его звенья имели вполне определённые движения.
Представим себе, что нам необходимо спроектировать механизм из k звеньев. Так как каждое звено, будучи свободным в плоскости, обладает тремя степенями свободы, то получим:
3k – общее количество степеней свободы всех k звеньев.
При образовании кинематической цепи звенья теряют свои степени свободы.
Кинематическая цепь – это ряд звеньев, соединенных между собой кинематическими парами. Если в кинематической цепи
p5 – количество кинематических пар 5-го класса, а каждая такая пара накладывает два условия связи на относительное движение звеньев, поэтому
2p5 – общее количество условий связи, наложенных всеми парами 5-го класса.
Пусть также в кинематической цепи
p4 – количество кинематических пар 4-го класса. Так как каждая пара 4-го класса накладывает одно условие связи, то
1p4 – общее количество условий связи, наложенных на относительное движение звеньев всеми парами 4-го класса.
Если обозначить буквой S общее количество условий связей в кинематической цепи, наложенное парами обоих классов, то
S = 2 p5 + p4 .
Количество степеней свободы H кинематической цепи определится разностью между числами 3k и S:
H = 3k – (2 p5 + p4).
 Механизм – это кинематическая цепь с одним неподвижным звеном, допускающая целесообразные однозначно определенные движения. Поэтому при образовании механизма одно из его звеньев должно быть сделано неподвижным (стойкой), тогда число степеней свободы механизма будет: W = H – 3, или
Механизм – это кинематическая цепь с одним неподвижным звеном, допускающая целесообразные однозначно определенные движения. Поэтому при образовании механизма одно из его звеньев должно быть сделано неподвижным (стойкой), тогда число степеней свободы механизма будет: W = H – 3, или
W = 3(k – 1) – (2 p5 + p4).
Обозначив k – 1 = n (n –количество подвижных звеньев механизма), имеем
W = 3n – (2 p5 + p4).
Эта формула была получена в 1869 году академиком Петербургской Академии наук П.Л.Чебышёвым и носит название формулы Чебышёва.
Фактически W означает количество независимых движений, которые должен иметь данный механизм для получения полной определенности в движениях всех его звеньев. По существу W означает чаще всего количество ведущих звеньев механизма.
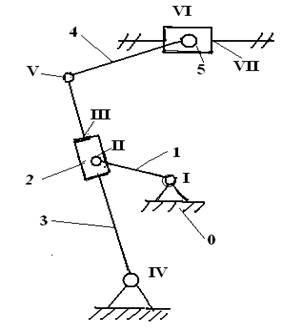
Пример. Механизм поперечно - строгального станка.
Обозначим номера подвижных звеньев данной схемы арабскими цифрами, их количество составит n = 5, римскими цифрами обозначим номера кинематических пар 5-го класса, получив их количество p5 = 7, пары 4-го класса в этом механизме отсутствуют, т. е. p4 = 0. Расчёт по формуле Чебышёва даёт
W = 3·5 – (2·7 + 1∙0) = 1
Следовательно, в этом механизме одна степень свободы, что означает необходимость выбрать одно ведущее звено для его нормального функционирования.
Дата добавления: 2017-04-05; просмотров: 3972;
Поиск по сайту
Узнать еще
- I. Расчёт методом контурных токов.
- II Расчет и анализ трехфазных цепей
- II. Расчёт методом суперпозиции.
- III. Основные законы, используемые при расчёте магнитных цепей.
- III. Расчёт электрического состояния цепи с последовательным соединением элементов L, R, C.
- IV. Расчёт простых цепей постоянного тока методом эквивалентных преобразований сопротивлений.
- IV. Расчёт цепи с параллельным соединением R, L, C элементов
- А) Назначение и порядок выполнения расчетов

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
