Идентификационное представление системы
Так как в большинстве случаем размерность выхода системы  намного меньше размерности вектора состояния
намного меньше размерности вектора состояния  динамической системы, то есть
динамической системы, то есть  , то на основе информационного множества
, то на основе информационного множества  нельзя идентифицировать параметры системы. Для использования множества в системах идентификации уравнение необходимо привести к специальному виду, который получил название наблюдателя.
нельзя идентифицировать параметры системы. Для использования множества в системах идентификации уравнение необходимо привести к специальному виду, который получил название наблюдателя.
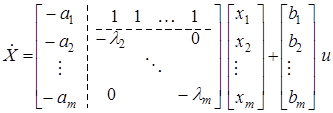
Рассмотрим динамическую систему
 (1)
(1)
где  — вектор состояния,
— вектор состояния,  ,
,  — вход и выход системы,
— вход и выход системы,  ,
,  ,
,
 ,
,
 — единичная матрица,
— единичная матрица,  — вектор параметров.
— вектор параметров.
Для системы (7.1) известна информация
 . (2)
. (2)
Предполагается, что система (1) является полностью наблюдаемой и управляемой.
Для идентификации системы (1) на множестве ее уравнение следует привести к канонической идентификационной форме. Так как матрица С является вектором, то состояние системы (1) не может быть однозначно определено на множестве  , поскольку существует множество систем, имеющих идентичные выходы
, поскольку существует множество систем, имеющих идентичные выходы  при входном воздействие
при входном воздействие  . Все системы этого класса получаются с помощью преобразования
. Все системы этого класса получаются с помощью преобразования

с матрицей  , удовлетворяющей уравнению
, удовлетворяющей уравнению
 , (3)
, (3)
а система (1) приводится к виду
 (4)
(4)
где  ,
,  .
.
Для восстановления компонент вектора X, элементов матриц  ,
,  применим модель
применим модель
 (5)
(5)
где  ,
,  — гурвицева матрица,
— гурвицева матрица,  ,
,  ,
,  ,
,  .
.
Необходимость перехода от уравнения (1) к (2) связана со структурой множества  . Уравнение (5) называется канонической идентификационной формой. Существует большое разнообразие канонических форм для системы (1). Наиболее общими из них являются матричные модели Ганкеля и Безу. Матрица преобразования S для этих моделей индуцируется матрицей Ганкеля и представима в виде произведения матриц достижимости и наблюдаемости. Что касается канонической формы для матриц и K в (4), (5), то они должны выбираться из следующих условий.
. Уравнение (5) называется канонической идентификационной формой. Существует большое разнообразие канонических форм для системы (1). Наиболее общими из них являются матричные модели Ганкеля и Безу. Матрица преобразования S для этих моделей индуцируется матрицей Ганкеля и представима в виде произведения матриц достижимости и наблюдаемости. Что касается канонической формы для матриц и K в (4), (5), то они должны выбираться из следующих условий.
К1. Уравнение

должно быть разрешимо относительно вектора G.
К2. Преобразование S должно удовлетворять как равенству (3), так и соотношению .
К3. Каноническая форма должна быть пригодной для синтеза адаптивных алгоритмов настройки векторов G и D.
Можно показать, что условиям К1, К2 удовлетворяет матрица , имеющая следующее каноническое представление на множестве :
 , (6)
, (6)
где  — вектор параметров,
— вектор параметров,  ,
,  — некоторые постоянные матрицы.
— некоторые постоянные матрицы.
В адаптивных системах наиболее широкое распространение получили следующие два представления для матрицы , являющиеся частным случаем (6):
а) выходная каноническая форма (минимальная реализация)
 ; (7)
; (7)
б) форма с  и
и  вида (неминимальная реализация)
вида (неминимальная реализация)
 ,
,  (8)
(8)
где d — символ Кронекера.
В случае б) вектор  и матрица L подбираются так, чтобы пара
и матрица L подбираются так, чтобы пара  была наблюдаемой.
была наблюдаемой.
Для восстановления вектора  и ненаблюдаемого вектора состояния
и ненаблюдаемого вектора состояния  в (5) по данным применяются адаптивные наблюдатели. Каждому из приведенных выше идентификационных представлений соответствует свой АН, получаемый из (5). Так для матрицы (7) адаптивный наблюдатель явного типа имеет вид (5) с векторами
в (5) по данным применяются адаптивные наблюдатели. Каждому из приведенных выше идентификационных представлений соответствует свой АН, получаемый из (5). Так для матрицы (7) адаптивный наблюдатель явного типа имеет вид (5) с векторами
 ,
,  ,
,
где  ,
,  — m-мерные настраиваемые векторы параметров наблюдателя,
— m-мерные настраиваемые векторы параметров наблюдателя,  — вектор параметров матрицы K.
— вектор параметров матрицы K.
Вектор  (вектор обратной связи) вводится для обеспечения асимптотической устойчивости АН в случае представления (7). Для построения адаптивного наблюдателя (5) используются вспомогательные сигналы, которые получаются путем пропускания сигналов
(вектор обратной связи) вводится для обеспечения асимптотической устойчивости АН в случае представления (7). Для построения адаптивного наблюдателя (5) используются вспомогательные сигналы, которые получаются путем пропускания сигналов  , через систему (фильтры состояния)
, через систему (фильтры состояния)
 ,
,  ,
,
где  — гурвицева матрица,
— гурвицева матрица,  — вектор вспомогательных сигналов,
— вектор вспомогательных сигналов,  — некоторый постоянный вектор.
— некоторый постоянный вектор.
АН явного не получил широкого распространения, что связано с необходимостью выбора вектора обратной связи. В системах управления чаще применяются адаптивные наблюдатели неявного типа. Им соответствует каноническая форма с матрицей L и вектором типа (8). Преимущество АН неявного типа состоит в том, что для описания системы (1) порядка m можно использовать обобщенное уравнение первого порядка относительно выхода . Такому описанию системы (1) соответствует модель с обобщенным входом
 , (9)
, (9)
 , (10)
, (10)
где  — вектор параметров,
— вектор параметров,  — обобщенный вход,
— обобщенный вход,  ,
,  ,
,  — вектор вспомогательных сигналов, получаемый на основе преобразования и
— вектор вспомогательных сигналов, получаемый на основе преобразования и  ,
,  — знак прямой суммы матриц.
— знак прямой суммы матриц.
Для восстановления вектора параметров и обеспечения условия

применяется адаптивный наблюдатель неявного типа
 , (11)
, (11)
где  — некоторое число (эталонная модель),
— некоторое число (эталонная модель),  — вектор настраиваемых параметров,
— вектор настраиваемых параметров,  выход наблюдателя.
выход наблюдателя.
1.3. Приведение уравнения (1) к идентификационной
форме (9), (10)
Опишем способ получения адаптивного наблюдателя Людерса-Нарендры (неминимальная реализация для матрицы ). Передаточную функцию системы (1) представим в виде
 . (12)
. (12)
Разделим числитель и знаменатель (П7.1) на полином  , где
, где  ,
,  ,
,  . Тогда
. Тогда  можно привести к виду
можно привести к виду
 . (13)
. (13)
Подставляя (13) в (12) после несложных преобразований для  получим
получим
 . (14)
. (14)
Чтобы записать это уравнение в пространстве состояний, введем обозначения
 (15)
(15)
Положим
 ,
,  ,
,  .
.
Тогда идентификационное представление будет иметь вид
 . (16)
. (16)
Переменные состояния системы (16) вычисляются в соответствии с (15). От уравнения (15) нетрудно перейти к модели с обобщенным входом (9), (10). Для этого достаточно положить
 ,
,  ,
,  ,
,
 .
.
В данном случае переменные состояния системы будут определяться путем решения алгебраических уравнений
 .
.
Описанный подход, основанный на применении операционного метода, можно применить и для получения идентификационного представления для нестационарных систем. Но при этом необходимо учитывать, что
 ,
,
где  .
.
Перейдем теперь к вопросам идентификации динамических систем, приведенных к идентификационной форме (9), (10). Изложим сначала метод непрерывных  -алгоритмов.
-алгоритмов.
2. Метод непрерывных -алгоритмов
Непрерывный случай
Рассмотрим задачу идентификации объекта
 , (17)
, (17)
где  — вектор состояния;
— вектор состояния;  — вектор параметров, принадлежащий некоторой ограниченной, но априори неизвестной области
— вектор параметров, принадлежащий некоторой ограниченной, но априори неизвестной области  ;
;  — вектор управления (входа);
— вектор управления (входа);  ;
;  — непрерывно дифференцируемая по X, A, U вектор-функция.
— непрерывно дифференцируемая по X, A, U вектор-функция.
Под объектом будем понимать обобщенный настраиваемый объект, включающий в себя собственно объект и настраиваемую модель. На объект наложены ограничения, которые в отличие от (18) формируются на основе информации  , получаемой в результате анализа множества при заданном уровне априорных данных
, получаемой в результате анализа множества при заданном уровне априорных данных  ,
,
 , (18)
, (18)
В процессе решения задачи идентификации область  может уточняться и трансформироваться, что отражено зависимостью от t в (18).
может уточняться и трансформироваться, что отражено зависимостью от t в (18).
На движения системы рассматривается функционал  (функция Ляпунова), характеризующая качество работы системы. Под целью управления понимается выполнение условия
(функция Ляпунова), характеризующая качество работы системы. Под целью управления понимается выполнение условия
 . (19)
. (19)
Для обеспечения (19) алгоритм принятия решений (адаптации, управления)  должен выбираться таким, чтобы обеспечить выполнение условия
должен выбираться таким, чтобы обеспечить выполнение условия
 . (20)
. (20)
Задача сводится к выбору такого алгоритма настройки параметров обобщенного объекта
 , (21)
, (21)
где A — искомый оператор, чтобы на движениях системы (17) при наличии ограничений (18) выполнялось целевое условие (19) или более слабое условие (20).
Рассмотрим сначала случай координатных ограничений. Найдем производную по времени от  с учетом (17)
с учетом (17)
 .
.
При отсутствии ограничений из условия (20) алгоритм скоростного градиента
 , (22)
, (22)
(  — симметрическая положительно определенная матрица), учет области приводит к более сложному алгоритму идентификации. Чтобы найти его, поступим следующим образом.
— симметрическая положительно определенная матрица), учет области приводит к более сложному алгоритму идентификации. Чтобы найти его, поступим следующим образом.
1. Осуществим расщепление функции  на два вектора, один из которых не зависит, а второй зависит от
на два вектора, один из которых не зависит, а второй зависит от  . Для объектов, линейных по A, первый сомножитель будет иметь вид
. Для объектов, линейных по A, первый сомножитель будет иметь вид

(таким путем ищется алгоритм скоростного градиента (22)). В случае нелинейной зависимости  от А такое расщепление осуществляется исходя из вида функции
от А такое расщепление осуществляется исходя из вида функции  и полученная составляющая обозначается через
и полученная составляющая обозначается через  . Итак, имеем
. Итак, имеем
 ,
,
где  — некоторая вектор-функция.
— некоторая вектор-функция.
2. Следующий этап состоит в учете ограничений. Для этого осуществляется преобразование вектора  в Y и функция приводится к так называемому F-представлению
в Y и функция приводится к так называемому F-представлению
 , (23)
, (23)
где  — некоторая положительная вектор-функция (то есть вектор, у которого
— некоторая положительная вектор-функция (то есть вектор, у которого  ),
),  — непрерывно дифференцируемая по А вектор-функция.
— непрерывно дифференцируемая по А вектор-функция.
Вектор  в обобщенном виде отражает ограничения, накладываемые на объект. Он конструируется исходя из вектор-функции
в обобщенном виде отражает ограничения, накладываемые на объект. Он конструируется исходя из вектор-функции  с учетом области (18), то есть
с учетом области (18), то есть
 .
.
Таким образом, учет ограничений приводит к такому преобразованию вектор-функции , чтобы вектор-функция  была положительной
была положительной

 . (24)
. (24)
Обеспечение положительности вектора объясняется применением метода функций Ляпунова и условиями реализации множества . Если область является открытой, то есть на объект не наложено ограничений, то преобразование  является таким, что
является таким, что
 ,
,
где  — единичный вектор.
— единичный вектор.
В результате применения преобразования (24) к вектор-функция  также приводится к некоторой вектор-функции
также приводится к некоторой вектор-функции  , вид которой полностью определяется множеством ,
, вид которой полностью определяется множеством ,
 . (25)
. (25)
Так как  , то для обеспечения условия
, то для обеспечения условия  , соответствующего достижению целевого условия (19), достаточно применить следующий алгоритм идентификации
, соответствующего достижению целевого условия (19), достаточно применить следующий алгоритм идентификации
 , (26)
, (26)
где — положительно определенная симметрическая матрица.
Назовем (26) адаптивным j-алгоритмом. Как следует из (25), свойства адаптивного j-алгоритма полностью определяются ограничениями, накладываемыми на объект. Что качается ограничений на помеху  , то они отражаются с помощью условия
, то они отражаются с помощью условия  .
.
Если на функцию  наложить функциональное ограничение
наложить функциональное ограничение
 ,
,
где  — квадратичная форма от , зависящая от , то по аналогии с (26) получим адаптивный алгоритм вида
— квадратичная форма от , зависящая от , то по аналогии с (26) получим адаптивный алгоритм вида
 , (27)
, (27)
где  .
.
Назовем уравнение (27) пропорционально-интегральным j-алгоритмом.
Полученные законы описывают широкий класс алгоритмов идентификации. Если функция  является линейной по вектору настраиваемых параметров
является линейной по вектору настраиваемых параметров  , то для большинства практических случаев будет зависеть от псевдоградиента функции
, то для большинства практических случаев будет зависеть от псевдоградиента функции  . При этом функция должна принадлежать классу H .
. При этом функция должна принадлежать классу H .
Определение 5.1. Будем говорить, что вектор-функция  , если:
, если:
1) она является непрерывно дифференцируемой по вектору А

 ,
,
где  — матрица Якоби;
— матрица Якоби;
2) матрица является такой, что вектор  является неотрицательным
является неотрицательным

 .
.
Последнее условие обобщает условие псевдоградиентности на векторный случай.
Итак, если функция  является линейной по A, то из (26) и (27) можно получить класс непрерывных псевдоградиентных алгоритмов идентификации. Для данного класса алгоритмов условие устойчивости записывается в виде
является линейной по A, то из (26) и (27) можно получить класс непрерывных псевдоградиентных алгоритмов идентификации. Для данного класса алгоритмов условие устойчивости записывается в виде
 .
.
Другим частным случаем, следующим из (26) и (27), является класс алгоритмов скоростного градиента
 , (28)
, (28)
 . (29)
. (29)
Уравнение (29) представляет собой регуляризованный вариант алгоритма (28).
Изложенная методология синтеза применима как в случае ограничений, накладываемых на вход, выход (действующую помеху), так и вектор параметров объекта
 ,
,
где  — нелинейный оператор.
— нелинейный оператор.
В задачах идентификации в качестве чаще всего используется норма вектора А в пространстве  . Как и в случае (18), учет ограничений
. Как и в случае (18), учет ограничений  приводит к F-представлению (23), но в отличие от изложенного выше вектор-функция Y будет зависеть от вектора . Несмотря на это к
приводит к F-представлению (23), но в отличие от изложенного выше вектор-функция Y будет зависеть от вектора . Несмотря на это к  предъявляются те же требования, что и при учете области .
предъявляются те же требования, что и при учете области .
Учет множества имеет свою специфику, которая, естественно, отразится на классе получаемых алгоритмов. При  адаптивный алгоритм записывается в виде
адаптивный алгоритм записывается в виде
 . (30)
. (30)
Матрица  играет роль индикатора принадлежности и имеет вид
играет роль индикатора принадлежности и имеет вид
где  ,
,  — некоторые матрицы, конструируемые на основе множества . В частности,
— некоторые матрицы, конструируемые на основе множества . В частности,  ,
,  , где
, где  ,
,  — соответственно единичная и нулевая матрицы. В общем случае является функцией k-значной логики.
— соответственно единичная и нулевая матрицы. В общем случае является функцией k-значной логики.
В отличие от закона (26) нелинейность алгоритма (30) проявляется в зависимости вектора  от матрицы .
от матрицы .
Заметим, что в качестве  при синтезе j-алгоритмов могут использоваться как локальные, так и интегральные функционалы. В локальном случае для функционала
при синтезе j-алгоритмов могут использоваться как локальные, так и интегральные функционалы. В локальном случае для функционала  имеем
имеем  , а в случае интегрального функционала
, а в случае интегрального функционала  равно подынтегральной функции.
равно подынтегральной функции.
Дата добавления: 2017-02-13; просмотров: 1660;
Поиск по сайту
Узнать еще
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ
- II. ЭЛЕКТРИЧЕСКИЙ ДИПОЛЬ. ДИПОЛЬНЫЙ МОМЕНТ СИСТЕМЫ ЭЛЕКТРИЧЕСКИХ ЗАРЯДОВ
- III. Избирательные системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
