Типы ограничений в системах идентификации
В теории управления можно выделить следующие виды ограничений:
1. Ограничения, накладываемые на состояние объекта.
2. Ограничения на управляющие переменные.
3. Ограничения на параметры объекта или управляющего устройства.
4. Функциональные ограничения.
5. Ограничения на действующие возмущения.
Как правило, ограничения 1–3, 5 формируются априори и могут быть представлены в виде интервала значений. Более сложным является процесс формирования функциональных ограничений. В общем случае они записываются в виде
 , (29)
, (29)
где L — некоторый оператор,  ,
,  — соответственно векторы состояния и управления,
— соответственно векторы состояния и управления,  ,
,  — соответственно векторы параметров объекта и управляющего устройства.
— соответственно векторы параметров объекта и управляющего устройства.
Чаще всего L является интегральным или нелинейным оператором. Предполагается, что векторы  ,
,  , где
, где  — область параметрических ограничений.
— область параметрических ограничений.
Функциональные ограничения являются наиболее общим видом ограничений, накладываемых на систему. Как правило, они зависят от параметров и переменных состояния объекта, а так же функционала, определяющего качество работы системы. Чаще всего функциональные ограничения получаются в результате решения задачи оптимизации и задают класс допустимых алгоритмов управления. Учитывая сказанное выше, неравенство (29) можно записать следующим образом
 ,
,
где функционал  отражает качество переходных процессов в системе. Если функция не задана, то из (29) можно получить ограничения первых двух типов.
отражает качество переходных процессов в системе. Если функция не задана, то из (29) можно получить ограничения первых двух типов.
4.2. Метод адаптивных  -алгоритмов
-алгоритмов
Рассмотрим дискретную динамическую систему
 , (31)
, (31)
где  — вектор состояния;
— вектор состояния;  — вектор параметров, принадлежащий некоторой ограниченной, но априори неизвестной области
— вектор параметров, принадлежащий некоторой ограниченной, но априори неизвестной области  ;
;  — вектор управления (входа); n — дискретное время;
— вектор управления (входа); n — дискретное время;  — непрерывно дифференцируемая по
— непрерывно дифференцируемая по  ,
,  ,
,  вектор-функция. На систему (31) наложены ограничения типа (30).
вектор-функция. На систему (31) наложены ограничения типа (30).
На движениях системы (31) рассматривается функционал (функция Ляпунова)  . Алгоритм адаптации параметров модели ищется таким образом, чтобы выполнялось целевое условие
. Алгоритм адаптации параметров модели ищется таким образом, чтобы выполнялось целевое условие
 , (32)
, (32)
или
 . (32а)
. (32а)
При отсутствии алгоритм адаптации вектора имеет вид
 . (33)
. (33)
Закон (33) можно рассматривать как дискретный аналог алгоритма скоростного градиента.
Изложим метод получения дискретных j-алгоритмов идентификации.
Перепишем неравенство (32а) в виде
 .
.
Считаем, что функция  является непрерывно дифференцируемой по почти всюду за исключением конечного числа точек. Тогда для
является непрерывно дифференцируемой по почти всюду за исключением конечного числа точек. Тогда для  , как и в непрерывном случае, справедливо следующее F-представление
, как и в непрерывном случае, справедливо следующее F-представление
 , (34)
, (34)
где  ,
,  — положительная вектор-функция, способ построения которой будет описан далее;
— положительная вектор-функция, способ построения которой будет описан далее;  ,
,  — непрерывно дифференцируемая по вектор-функция.
— непрерывно дифференцируемая по вектор-функция.
Так как  , то для обеспечения условия (32а) достаточно применить следующий алгоритм параметрического оценивания
, то для обеспечения условия (32а) достаточно применить следующий алгоритм параметрического оценивания
 , (35)
, (35)
где  — положительная симметрическая матрица,
— положительная симметрическая матрица,  — матричный индикатор принадлежности.
— матричный индикатор принадлежности.
Если на систему (31) наложить функциональное ограничение
 ,
,
где  ,
,  — некоторое число, то получим следующую процедуру
— некоторое число, то получим следующую процедуру
 .
.
Если функция является линейной по , то уравнение (35) описывает класс итерационных псевдоградиентных алгоритмов. Приведем общую запись псевдоградиентного алгоритма идентификации для объекта управления с одним выходом, модель которого описывается уравнением авторегрессии – скользящего среднего:
 ,
,
 ,
,
 ,
,
где  — некоторая постоянная матрица, выбираемая из условия
— некоторая постоянная матрица, выбираемая из условия  ;
;  ;
;  — вектор настраиваемых параметров;
— вектор настраиваемых параметров;  — нелинейная функция;
— нелинейная функция;  — положительная последовательность чисел;
— положительная последовательность чисел;  — обобщенный вход;
— обобщенный вход;  — положительно определенная матрица;
— положительно определенная матрица;  — нелинейная вектор-функция;
— нелинейная вектор-функция;  — матричный индикатор принадлежности
— матричный индикатор принадлежности  .
.
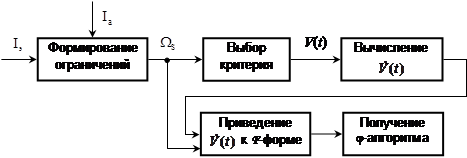
Рис. 2. Этапы синтеза j-алгоритмов
Таким образом, метод адаптивных j-алгоритмов идентификации (как непрерывных, так и дискретных) позволяет учесть реальные условия функционирования объекта и синтезировать оптимальные законы оценивания, соответствующие этим условиям. В отличие от известных подходов к выбору алгоритмов идентификации данный подход позволяет выделить лишь те переменные и связи, от которых зависит качество работы системы идентификации, а затем использовать их в алгоритмах адаптации параметров модели. Конструктивность получаемых решений является основной отличительно особенностью метода j-алгоритмов. Этапы синтеза j-алгоритмов приведены на рис. 2.
Примеры
Рассмотрим снова систему (1)
 . (36)
. (36)
Для оценки вектора  применим модель
применим модель
 . (37)
. (37)
О системе (36) имеется текущая экспериментальная информация, полученная в результате измерений в процессе нормального функционирования,
 ,
,
где  — дискретное время. Имеется априорная информация о том, что
— дискретное время. Имеется априорная информация о том, что  содержит аномальные измерения, т. е. большие по амплитуде выбросы.
содержит аномальные измерения, т. е. большие по амплитуде выбросы.
Ставится задача: необходимо на основе анализа  разработать алгоритм оценки вектора параметров системы (36) с помощью модели (37) из условия устойчивости системы идентификации.
разработать алгоритм оценки вектора параметров системы (36) с помощью модели (37) из условия устойчивости системы идентификации.
Введем функцию Ляпунова
 ,
,
где  ,
,  .
.
Алгоритм идентификации ищем таким образом, чтобы обеспечить выполнение условия устойчивости (32а). Имеем
 . (38)
. (38)
Если на систему не наложено ограничений, то получаем алгоритм (33)
 .
.
Чтобы учесть ограничения, необходимо  привести к виду (34). Для этого следует преобразовать второе слагаемое в правой части (38). Для этого введем функцию
привести к виду (34). Для этого следует преобразовать второе слагаемое в правой части (38). Для этого введем функцию
 (39)
(39)
где  — числа, задаваемые из конструктивных соображений.
— числа, задаваемые из конструктивных соображений.
Тогда, учитывая (39), для  получаем F-представление (34)
получаем F-представление (34)
 ,
,
где
 ,
,  , (40)
, (40)
Если числа  могут быть отрицательными, то необходимо соответствующим образом модифицировать вид функции
могут быть отрицательными, то необходимо соответствующим образом модифицировать вид функции  .
.
Тогда  -алгоритм (35) с учетом (40) примет вид
-алгоритм (35) с учетом (40) примет вид
 ,
,
откуда
 . (41)
. (41)
Итак, получен алгоритм идентификация системы (36)
Если вместо (39) использовать идеальную релейную функции
то 
 , и так как
, и так как  , то (35) в данном случае примет вид
, то (35) в данном случае примет вид
 . (41)
. (41)
Нетрудно доказать сходимость процедур (41), (42).
Дата добавления: 2017-02-13; просмотров: 1853;
Поиск по сайту
Узнать еще
- I. Политический режим: понятие, сущность и основные типы.
- I. Понятие и типы политических партий.
- II. Типы политических лидеров.
- VI. ЩЕЛЕВЫЕ И СПЕЦИАЛЬНЫЕ ТИПЫ АНТЕНН
- А) Типы и конструктивные особенности баз.
- А. Клинические типы.
- Адаптивные типы рептилий. Питание и ядовитый аппарат. Размножение (яйцекладущие, яйцеживородящие, живородящие формы).
- Адаптивные экологические типы человека

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
