Наблюдаемый информационный портрет
МЕТОДЫ СТРУКТУРНОЙ ИДЕНТИФИКАЦИИ СТРУКТУРНАЯ ИДЕНТИФИКАЦИЯ ДИНАМИЧЕСКИХ СИСТЕМ
Рассмотрим методы структурной идентификации, основанные на анализе экспериментальной информации в условиях неопределенности. Как уже отмечалось, до настоящего времени не предложено каких-либо регулярных методов выбора структуры модели. В основном работает интуиция исследователя, а также перебор нелинейностей, который задает исследователь, исходя из своего опыта и интуиции. Во всех указанных подходах проверка нелинейных составляющих модели производится на основе применения параметрических методов.
Сама по себе задача структурной идентификации динамических систем является сложной и распадается на ряд подзадач, которые сводятся к нахождению тех или иных структурных параметров системы. К наиболее важным из них относят:
· оценка порядка системы;
· оценка типа состояния равновесия;
· оценка собственных чисел матрицы состояния системы;
· выбор класса нелинейных операторов;
· оценка нестационарности системы;
· оценка запаздывания системы.
Ниже дается решение некоторых из этих подзадач.
Предварительный вывод о структуре система можно сделать на основе наблюдаемого информационного портрета.
Наблюдаемый информационный портрет
Рассмотрим систему
 (1)
(1)
где  — вход,
— вход,  — выход системы,
— выход системы,  — вектор состояния,
— вектор состояния,  ,
,  ,
,  — матрица параметров,
— матрица параметров,  — гладкая непрерывно дифференцируемая по
— гладкая непрерывно дифференцируемая по  и
и  вектор-функция,
вектор-функция,  ,
,  — функция, задающая способ формирования выхода системы.
— функция, задающая способ формирования выхода системы.
К множеству  будем относить не сами векторы
будем относить не сами векторы  и
и  , а их наблюдаемые (измеряемые) аналоги
, а их наблюдаемые (измеряемые) аналоги  ,
,  , которые получаются в результате применения операторов
, которые получаются в результате применения операторов  ,
,  :
:
 ,
,  , (2)
, (2)
отражающих ошибки измерения. Операторы  ,
,  определены на множествах
определены на множествах  ,
,  , характеризующих неопределенность процесса измерения.
, характеризующих неопределенность процесса измерения.
В системах идентификации обычно используется множество  . В силу применения операторов (2) получим множество наблюдений (измерений)
. В силу применения операторов (2) получим множество наблюдений (измерений)
 (3)
(3)
В дальнейшем в отличие от (3) будем называть наблюдаемым информационным множеством системы (1).
Представим множество (4) в виде
 . (4)
. (4)
Определим бинарное отношение G между множествами U и Y системы (1):  . Назовем это множество портретом системы (1) в пространстве
. Назовем это множество портретом системы (1) в пространстве  . Множество G является дополнением множества X при проектировании его на
. Множество G является дополнением множества X при проектировании его на  . Соответствующий фазовый портрет системы (1) представим в виде
. Соответствующий фазовый портрет системы (1) представим в виде
 .
.
Расширенным фазовым портретом системы будем называть отображение

 .
.
Определение 1. Рассмотрим наблюдаемое информационное множество  (4) системы (1), определенное в пространстве . Тогда наблюдаемым информационным портретом системы (1) назовем бинарное отношение
(4) системы (1), определенное в пространстве . Тогда наблюдаемым информационным портретом системы (1) назовем бинарное отношение
 .
.
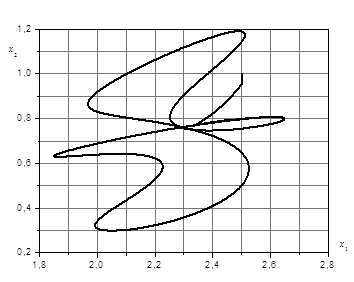
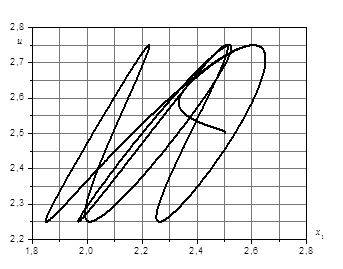
Наблюдаемый информационный портрет в отличие от фазового выходного портрета позволяет выявить новые свойства системы 1), которые дополняют динамическое множество X и позволяют определить ряд новых характеристик, полезных в процессе решения задачи структурной идентификации. На рис. 1 показаны примеры портретов для нестационарной системы второго порядка.
 а)
а)
 б)
б)
Рис. 1. Фазовый и наблюдаемый информационный портреты для нестационарной системы второго порядка: а) — фазовый портрет, б) — наблюдаемый информационный портрет
Дата добавления: 2017-02-13; просмотров: 1249;
Поиск по сайту
Узнать еще
- World Wide Web — главный информационный сервис.
- Диагноз по портрету
- Информационный диагностический тест, близкий к минимальному (метод Синдееева)
- Информационный обмен и информационный процесс
- ИНФОРМАЦИОННЫЙ ПАКЕТ ДЛЯ ПРЕССЫ
- Информационный процесс
- Информационный процесс бухгалтерского учета и информационные технологии
- ИНФОРМАЦИОННЫЙ ПРОЦЕСС И ЕГО КОМПОНЕНТЫ.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
