Классификация, назначение и области применения.
Манипуляционные роботы.
Робототехника - новое направление науки и техники, связанное с созданием и применением робототехнических систем. Робот, являющийся одним из основных объектов изучения в этой науке, представляет собой автоматическую машину для воспроизведения двигательных и интеллектуальных функций человека. Существуют различные классы роботов, среди которых важнейшими являются автоматические манипуляционные роботы. Частный вид этих роботов - промышленные роботы.
На сегодняшний день промышленные роботы и подобное им оборудование являются практически единственным средством автоматизации мелкосерийного производства. Важная особенность промышленных роботов состоит в том, что они позволяют наиболее просто совместить в едином цикле как транспортные, так и основные технологические операции, что позволяет создать на базе универсального оборудования гибкие автоматизированные производства.
Среди всех частей промышленного робота исполнительное устройство - механизм, обеспечивающий движение рабочего органа, - имеет определяющее значение. Именно от этого устройства во многом зависят такие важные характеристики робота, как быстродействие, маневренность, точность позиционирования, возможность работы в стесненных пространствах.
Классификация, назначение и области применения.
История механики богата примерами, которые свидетельствуют о постоянном стремлении человека создать механизмы и устройства, подобные живым существам. Это стремление обусловлено многими причинами, среди которых не последнее место занимает желание заменить человека при выполнении сложной и вредной работы. В 40-х годах в связи с потребностями атомной технологии появились манипуляторы, основное назначение которых - выполнение разнообразных технологических операций с радиоактивными веществами. Применение таких устройств позволило удалить человека из опасной зоны, за ним остались только функции дистанционного управления. Первыми такой манипулятор разработали сотрудники Аргонской национальной лаборатории США. Манипулятор под названием Master-Slave состоял из исполнительной механической руки (Slave), помещаемой в опасную для человека зону, и задающей механической руки (Master), которой в безопасной зоне манипулировал оператор. Исполнительная рука отличалась от задающей только наличием схвата. Связь между ними осуществлялась кинематическими передачами так, что звенья исполнительной руки копировали движение звеньев задающей. Отсюда название манипулятора - копирующий.
В наше время на смену малоэффективным устройствам прошлого пришли более эффективные автоматически действующие робото-технические устройства. В основе создания современных робототехнических устройств лежат новые технологии, получившие развитие лишь во второй половине XX в.: вычислительная техника и информатика. Робототехнические устройства стали важным средством комплексной автоматизации промышленного производства, они позволяют наиболее просто совместить в едином цикле как погрузочно-разгрузочные, так и основные технологические операции. Наиболее важные применения автоматических роботов связывают с разработкой и созданием автоматизированных участков, цехов и заводов.
Точного и однозначного определения робота не существует. Скорее всего можно говорить о целой группе определений. Наиболее полно сущность роботов можно отразить, определив их как программируемые устройства (машины), предназначенные для воспроизведения рабочих функций руки человека в процессе его трудовой деятельности. Понятие «программируемые» играет немаловажную роль: оно показывает, что действие робота не сводится к решению какой-то одной задачи - его функции можно целенаправленно изменять. Большинство современных роботов включают в себя компьютеры, которые помогают реализовать заданные программные действия.
В данной главе рассматриваются манипуляционные роботы. Манипуляционным роботом называют техническое устройство (машина), предназначенное для выполнения работ универсального характера, исполнительными устройствами которого служат манипуляторы (механические руки). В зависимости от степени участия человека в управлении манипуляционные роботы подразделяются на три тина: автоматические, биотехнические и интерактивные.
|
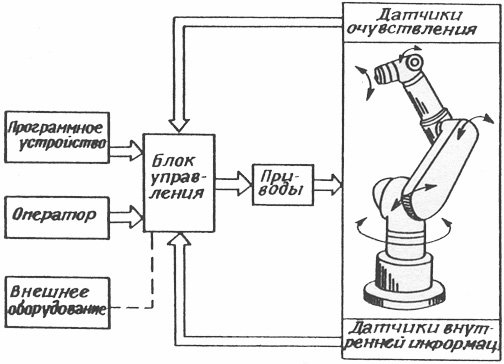 Автоматические манипуляционные роботы возникли и развились из систем программного управления станками. Процесс управления их действиями может происходить с участием и без непосредственного участия человека. Функциональная схема автоматического манипуляционного робота представлена на рис. 24.1 Манипуляционный робот состоит из манипулятора, исполнительных устройств, устройств очувствления, устройств связи с оператором и ЭВМ. Манипулятор имитирует движения руки человека и представляет собой многозвенный разомкнутый механизм с одноподвижными вращательными и поступательными кинематическими парами. Число степеней подвижности манипуляторов изменяется в пределах от 3 до 10. Функцию кисти в манипуляторе выполняет так называемый схват, конструкция которого предусматривает выполнение операций с определенным типом объектов манипулирования. Информационная система предназначена для сбора информации о состоянии внешней среды. В качестве ее элементов используются телевизионные, ультразвуковые, тактильные и другие датчики. Управляющая система служит для выработки законов управления приводами исполнительных органов на основании созданных алгоритмов и собранной информации.
Автоматические манипуляционные роботы возникли и развились из систем программного управления станками. Процесс управления их действиями может происходить с участием и без непосредственного участия человека. Функциональная схема автоматического манипуляционного робота представлена на рис. 24.1 Манипуляционный робот состоит из манипулятора, исполнительных устройств, устройств очувствления, устройств связи с оператором и ЭВМ. Манипулятор имитирует движения руки человека и представляет собой многозвенный разомкнутый механизм с одноподвижными вращательными и поступательными кинематическими парами. Число степеней подвижности манипуляторов изменяется в пределах от 3 до 10. Функцию кисти в манипуляторе выполняет так называемый схват, конструкция которого предусматривает выполнение операций с определенным типом объектов манипулирования. Информационная система предназначена для сбора информации о состоянии внешней среды. В качестве ее элементов используются телевизионные, ультразвуковые, тактильные и другие датчики. Управляющая система служит для выработки законов управления приводами исполнительных органов на основании созданных алгоритмов и собранной информации.
В автоматических манипуляционных роботах можно выделить три разновидности в зависимости от связи с человеком-оператором: программные, адаптивные и интеллектуальные.
Программные роботы работают по жесткой программе, заложенной в устройстве памяти, однако их можно перенастраивать на работу с другой жесткой программой действий. Их также называют автоматическими программными манипуляторами или промышленными роботами. Простота изменения программы, т. е. возможность переобучения промышленных роботов новым операциям, сделала эти роботы достаточно универсальными и гибко перенастраиваемыми на различные классы задач.
Адаптивные роботы отличаются от программных большим количеством внешних (оптических, телевизионных, тактильных) и внутренних датчиков. Системы управления роботами этого типа более сложные, не ограничиваются только работой по жесткой программе движения и могут в зависимости от внешних условий несколько корректировать ее. Как правило, они требуют для своей реализаций управляющую ЭВМ. Важной частью адаптивных роботов является их развитое программное обеспечение, предназначенное для обработки информации, поступающей от внешних и внутренних датчиков и оперативного изменения программы движения. Благодаря способности воспринимать изменения во внешней среде и приспосабливаться к существующим условиям функционирования адаптивные роботы могут манипулировать с неориентированными деталями произвольной формы и производить сборочные операции.
Характерной особенностью интеллектуальных роботов является их способность вести диалог с человеком, распознавать и анализировать сложные ситуации, планировать движения манипулятора и осуществлять их реализацию в условиях ограниченной информации о внешней среде. Все это обеспечивается совершенством управляющих систем, включающих в себя элементы искусственного интеллекта, способность к обучению и адаптации в процессе работы.
Биотехнические манипуляционные роботы берут свое начало от копирующих и командных механических систем. Операции, которые могут выполнять роботы этого типа, являются менее определенными, чем технологические операции, осуществляемые автоматическими роботами. Широкое распространение они получили при работе с радиоактивными материалами.
Управление манипуляторами этого типа роботов осуществляется оператором, а ЭВМ используется для облегчения его работы.
Различают три разновидности управления биотехническими манипуляционными роботами: копирующее, командное и полуавтоматическое. Копирующее управление осуществляется с помощью задающего устройства, кинематически подобного исполнительной руке робота. Такие системы называют копирующими манипуляторами. Человек-оператор перемещает задающее устройство, а манипулятор повторяет эти движения одновременно по всем степеням подвижности. В случае командного управления оператор с командного устройства дистанционно задает движение звеньям манипулятора путем поочередного включения соответствующих приводов. При полуавтоматическом управлении оператор, манипулируя управляющей рукояткой, имеющей несколько степеней свободы, задает движение схвата манипулятора. ЭВМ по сигналу от управляющей рукоятки формирует сигналы управления на приводы всех звеньев манипулятора. Существуют также биотехнические системы, в которых управление манипулятором осуществляется при помощи биоимпульсов от соответствующих мышц человеческой руки.
Интерактивные манипуляционные роботы отличаются активным участием человека в процессе управления, которое выражается в различных формах взаимодействия его с ЭВМ. Здесь также различают три разновидности управления: автоматизированное, супервизорное и диалоговое.
При автоматизированном управлении простые операции робот выполняет без управляющего воздействия со стороны оператора, а остальные - при участии оператора в биотехническом режиме. Супервизорное управление отличается тем, что весь цикл операций разбивается на части, выполняемые манипуляционным роботом автоматически, но переход от одной части к другой осуществляется оператором путем подачи соответствующих команд. При диалоговом управлении оператору и ЭВМ представляется возможность совместно принимать решения и управлять манипулятором в сложных ситуациях.
Дата добавления: 2017-02-13; просмотров: 3377;
Поиск по сайту
Узнать еще
- I. Назначение унифицированных газозарядных станций и основные тактико-технические требования, предъявляемые к ним.
- IV. Термодатчики, их устройство и назначение.
- А) Назначение и порядок выполнения расчетов
- Абсцесс, флегмона области рта (губ) (regio oris aut labialis)
- Абсцесс, флегмона щечной области (regie buccalis)
- Автоматическое регулирование в области дуговой сварки
- Адаптивная структура. Особенности и области применения
- Административные правонарушения в области воинского учета.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
