Качество процесса управления САУ в установившемся режиме
Для большей наглядности мы будем рассматривать структурную схему одноконтурной системы, представленную на рисунке 82.
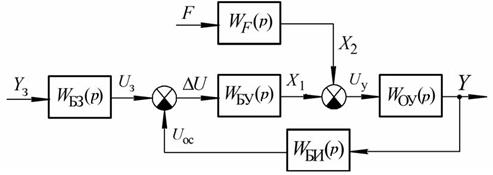
Рис.82. Структурная схема одноконтурной САУ
Упростим структурную схему, преобразовав ее в соответствии с правилами преобразования, к следующему виду:
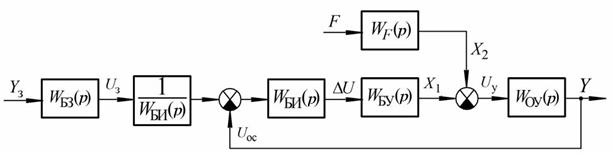
Рис.83. Упрощенная структурная схема одноконтурной САУ
Для того, чтобы согласовать сигналы uз(t) и uос(t), необходимо подобрать одинаковые передаточные функции WБЗ (р) и WБИ(р), поэтому должно выполняться равенство
WБЗ (р) = WБИ(р). С учетом этого условия структурную схему системы можно будет представить в виде, изображенном на рисунке 84, где ошибку регулирования δ (t), можно выразить в тех же единицах измерения, что и значения задающего параметра yз(t) и выходного параметра y(t).
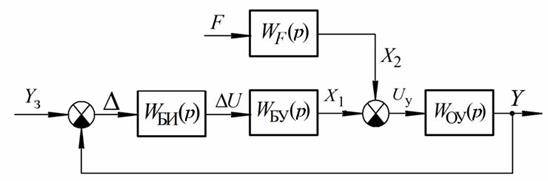
Рис.84. Структурная схема САУ после преобразования
В данном случае изображение ошибки регулирования Δвходит в формулу для определения сигнала рассогласования, который можно выразить, как:
ΔU(р) = Δ(р) WБИ(р) (2.66.)
Ошибка δ(t) зависит от величины параметров задающего и возмущающего воздействий, поэтому ее значение можно выразить, как сумму ошибок данных воздействий и представить, как:
δ(t) =δy(t) + δf(t) (2.67.)
Выразим передаточные функции в следующем виде:
 (2.68.)
(2.68.)
и
 (2.69.)
(2.69.)
Передаточную функцию разомкнутого контура мы выразили, как:
Wрк (р) =WБИ(р) WБУ (р) WОУ(р) (2.70.)
Следовательно, исходя из выражений (2.68.) и (2.69.) величину изображения ошибки можно представить следующим образом:
 (2.71.)
(2.71.)
Существуют типовые законы оценки установившегося режима, которыми установлены
следующие условия:
а) задающее и возмущающее воздействия постоянны и не изменяются во времени, т.е.
yз(t), f (t) = const (2.72.)
б) изменения в системе происходят с постоянной скоростью, т.е.
yз (t) = a t и f (t) = const (2.73.)
в) изменения в системе происходят с постоянным ускорением, т.е.
y(t) = b t2/2и f (t) = const (2.74.)
г) изменения в системе происходят по гармоническому закону, т.е.
yз (t) = y0 sin(ω t) и f (t) = const (2.75.)
Статической ошибкой называется значение ошибки регулирования δ (∞) при постоянной величине входного воздействия.
Статической системой называется система, у которой при постоянной величине входного воздействия, значения ошибок входного и возмущающего воздействий не равны нулю.
Статической по возмущающему воздействию называется система, у которой при постоянной величине входного воздействия, при значении ошибки входного воздействия равной нулю, ошибка возмущающего воздействия не равна нулю.
Астатической называется система, у которой значения ошибок входного и возмущающего воздействий равны нулю.
Астатической по задающему воздействию называется система, у которой значение ошибки входного воздействия не равно нулю, а ошибка возмущающего воздействия равна нулю.
Так как значение передаточной функции разомкнутого контура выражается следующим образом:
 (2.76.)
(2.76.)
в данном случае  , r- количество нулевых корней полинома A(р) или порядок астатизма системы.
, r- количество нулевых корней полинома A(р) или порядок астатизма системы.
Существование системы статической по задающему воздействию и астатической по возмущающему воздействию является невозможным.
Точность статической системы улучшается с увеличением передаточного коэффициента разомкнутого контура kрк.
Существует также коэффициент статизма системы, который вычисляется по формуле:
s = 1 / 1 + kрк (2.77.)
Считается, что при величине коэффициента статизма s = 0,1 ÷ 0,01, точность
регулирования системы является удовлетворительной, поэтому коэффициент передачи
разомкнутого контура статической системы должен составлять kрк = 10 ÷ 100.
Дата добавления: 2017-01-26; просмотров: 2124;
Поиск по сайту
Узнать еще
- CRM - стратегия управления взаимоотношениями с клиентом
- I-s диаграмма рабочего процесса ГТД
- I. Диалектический характер процесса познания
- I.2.3 ПЕРВЫЙ ЗАКОН (НАЧАЛО) ТЕРМОДИНАМИКИ. ПРИМЕНЕНИЕ ПЕРВОГО ЗАКОНА ТЕРМОДИНАМИКИ К ИЗОПРОЦЕССАМ
- II. В сравнении с другими органами управления, функционирующих на профессиональной основе
- N Новизна и оригинальность процесса или результата
- Process Control Block и контекст процесса
- ІІ.5.2. Основы процесса фракталь-ного расширения квадрата

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
