Ультразвуковая дефектоскопия
Ультразвуковая дефектоскопия – способ неразрушающего контроля, основанный на исследовании процесса распространения в контролируемом изделии ультразвуковых волн с частотой 0,5-25 МГц.
Дефекты в металле, возникающие при сварке и литье, как правило, представляют собой газовые включения. Так как газ имеет акустическое сопротивление на 5 порядков меньше чем у металла, то ультразвуковая волна практически полностью отражается от дефекта при условии, что размер дефекта больше половины длины волны. При размерах дефекта меньше половины длины волны ультразвуковая волна огибает дефект, то есть наблюдается дифракция. Разрешающая способность ультразвуковой дефектоскопии, то есть минимальный размер дефекта, который может быть выявлен с помощью этого метода, определяется длиной волны. Для повышения разрешающей способности стараются увеличить частоту используемых при контроле колебаний. Недостатком является то, что с увеличением частоты снижается проникающая способность ультразвука. В связи с этим выбор частоты колебаний требует нахождения определенного компромисса между разрешающей способностью и проникающей способностью.
Наиболее распространенным способом возбуждения ультразвуковых волн в контролируемом объекте и приема волн, прошедших через объект, является использование пьезоэлектрических преобразователей. Для возбуждения волн используется обратный пьезоэлектрический эффект, а для их приема – прямой пьезоэлектрический эффект. Для возбуждения и приема волн могут использоваться два раздельных преобразователя, либо может использоваться совмещенный преобразователь, выполняющий функции излучателя и приемника. Между объектом и преобразователем обычно необходимо создание прослойки контактной жидкости, так как при наличии между ними слоя воздуха эффективность излучения и приема волн будет резко снижаться из-за существенного различия акустического сопротивления воздуха и контролируемого материала (материала преобразователя).
Существующие методы ультразвукового контроля можно разделить на активные и пассивные. Активные методы требуют возбуждения в контролируемом объекте ультразвуковых волн, в то время как в пассивных методах источником волн является сам объект и производится только их регистрация.
Активные методы можно разделить на следующие группы:
1) методы отражения;
2) методы прохождения;
3) комбинированные методы (прохождение + отражение);
4) импедансный метод;
5) методы собственных колебаний.
Методы отражения в свою очередь включают в себя:
1) эхо-метод (эхо-импульсный метод);
2) зеркальный метод (эхо-зеркальный метод);
3) дифракционно-временной метод;
4) реверберационный метод.
В эхо-импульсном методе преобразователь излучает в контролируемый объект короткий ультразвуковой импульс и регистрирует импульсы, отраженные от дефектов. Задержка времени между зондирующим импульсом и эхо-импульсами дает информацию о глубине залегания дефектов.

Рисунок 1 – Эхо-импульсный метод контроля, эхо-импульс наблюдается только в случае наличия в сварном шве дефекта
В эхо-зеркальном методе используются два преобразователя, расположенных, как правило, с одной стороны изделия. Один из преобразователей служит источником волн, а второй регистрирует волны, отраженные от дефекта и донной поверхности изделия.
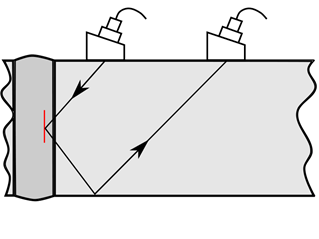
Рисунок 2 – Эхо-зеркальный метод контроля
Эхо-зеркальный метод используется для выявления вертикально расположенных дефектов. При этом преобразователи перемещают таким образом, чтобы сумма расстояний L1 и L2 между первым и вторым преобразователями и плоскостью дефекта принимала постоянное значение, равное 2H·tg(α), где H – толщина изделия, α – угол между плоскостью дефекта и направлением ввода колебаний.
В дифракционно-временном методе используются два преобразователя (излучатель и приемник), расположенных с одной стороны изделия. Если дефект имеет острые кромки, что характерно для трещин, то волны от излучателя дифрагируют на краях дефекта, отражаясь во все стороны, в том числе в сторону приемника. Приемник регистрирует время прихода импульсов от обоих краев дефекта, что позволяет определить размеры дефекта.

Рисунок 3 – Дифракционно-временной метод контроля
В реверберационном методе используется явление реверберации – это процесс постепенного уменьшения интенсивности звука при его многократных отражениях. Метод используется для контроля качества сцепления слоев в многослойных конструкциях. В случае контроля двухслойной конструкции при качественном соединении слоев ультразвуковая волна будет проходить из первого слоя во второй. В случае некачественного соединения будут наблюдаться многократные отражения от второго слоя, так называемый «лес».
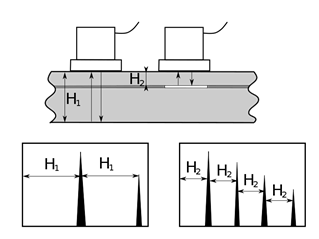
Рисунок 4 – Реверберационный метод
Методы прохождения включают в себя:
1) теневой (амплитудный) метод;
2) временной теневой метод;
3) велосиметрический метод.
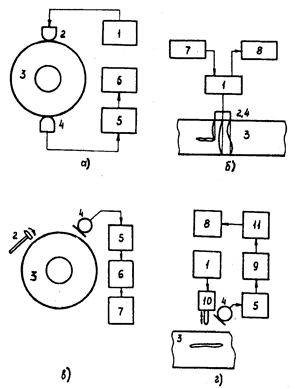
В теневом методе (рисунок 5а) приемник регистрирует ослабление амплитуды прошедшей через изделие волны от излучателя (сквозного сигнала) в результате взаимодействия с дефектом.
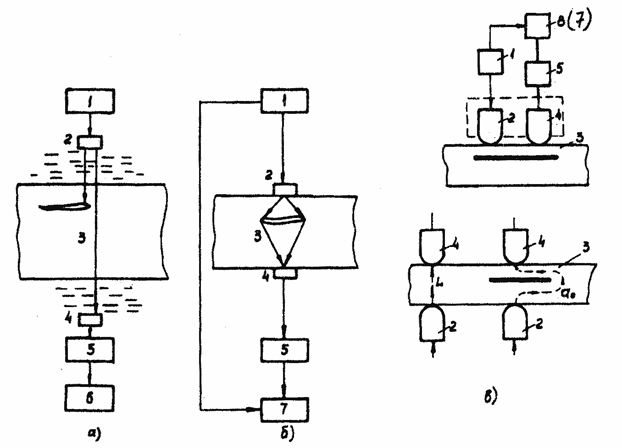
1 – генератор, 2 – излучатель, 3 – контролируемый объект, 4 – приемник, 5 – усилитель, 6 – измеритель амплитуды, 7 – измеритель времени пробега, 8 – измеритель фазы
Рисунок 5 – Методы прохождения: а) теневой; б) временной теневой; в) велосиметрический
Во временном теневом методе (рисунок 5б) регистрируется запаздывание импульсов, вызванное огибанием дефекта.
Велосиметрический метод (рисунок 5в) основан на регистрации изменения скорости распространения ультразвуковых волн в зоне дефекта. В этом методе обычно используют преобразователи с сухим точечным контактом. Могут использоваться импульсные и непрерывные волны. В первом случае регистрируется время пробега импульса, а во втором случае – сдвиг фазы прошедшей через объект волны. Существуют варианты метода с односторонним и двусторонним доступом. В первом случае при распространении в тонком изделии изгибных волн (антисимметричных волн Лэмба нулевого порядка) наличие расслоения приводит к снижению скорости распространения волны. Во втором случае при отсутствии дефекта энергия передается от излучателя к приемнику в виде продольной волны, а при наличии дефекта – в виде антисимметричной волны Лэмба нулевого порядка, которая проходит больший путь и распространяется с меньшей скоростью.
Импедансный метод основан на анализе изменения механического импеданса участка поверхности контролируемого объекта, с которым взаимодействует преобразователь в виде колеблющегося стержня. Между преобразователем и объектом создается сухой точечный контакт. При наличии в объекте подповерхностного дефекта в виде расслоения механический импеданс снижается, так как расположенный над дефектом участок становится более податливым. Это приводит к изменению режима колебаний стержня, в результате чего уменьшаются механические напряжения на приемнике.
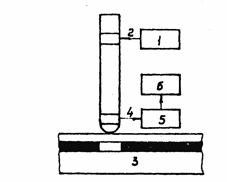
1 – генератор, 2 – излучатель, 3 – объект контроля, 4 – приемник, 5 – усилитель, 6 – индикатор
Рисунок 6 – Импедансный метод контроля
Также может использоваться схема, не содержащая приемника. В этом случае о наличии дефекта судят по изменению режима работы (электрического импеданса) генератора, подключенного к излучателю.
Импедансный метод используется в ультразвуковых твердомерах, в которых изменение импеданса происходит в результате изменения площади контакта индентора с контролируемым материалом.
Методы собственных колебаний включают в себя:
1) метод свободных колебаний;
2) метод вынужденных колебаний.
Методы собственных колебаний также можно разделить на интегральные и локальные. В интегральных методах анализируют собственные частоты изделия, колеблющегося как единое целое, а в локальных методах – колебания отдельных участков изделия.
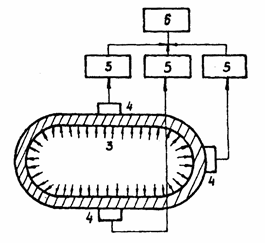
В интегральном методе вынужденных колебаний (рисунок 7а) излучатель подключается к генератору регулируемой частоты. При совпадении частоты генератора с собственной частотой колебаний изделия приемник регистрирует резкое возрастание амплитуды колебаний (резонанс).
1 – генератор, 2 – излучатель, 3 – объект контроля, 4 – приемник, 5 – усилитель, 6 – индикатор резонанса, 7 – модулятор частоты, 8 – индикатор, 9 – анализатор спектра, 10 – ударный вибратор, 11 – блок обработки информации
Рисунок 7 – Методы собственных колебаний: а) интегральный метод вынужденных колебаний; б) локальный метод вынужденных колебаний; в) интегральный метод свободных колебаний; г) локальный метод свободных колебаний
Локальный метод вынужденных колебаний (рисунок 7б) используют в основном в ультразвуковых толщиномерах. Излучатель возбуждает в изделии колебания непрерывно меняющейся частоты и фиксируются частоты резонанса системы «преобразователь – изделие». По резонансным частотам определяют толщину изделия и наличие в нем дефектов. Дефекты, параллельные поверхности, приводят к кажущемуся изменению толщины, а наклонные дефекты приводят к исчезновению резонансов.
В методе свободных колебаний (рисунки 7в и 7г) колебания объекта возбуждаются путем кратковременного ударного воздействия, например, с помощью молотка. Отклик объекта регистрируется с помощью микрофона, а частоты резонанса определяются с помощью анализатора спектра.
Пассивные методы ультразвуковой дефектоскопии можно разделить на следующие группы:
1) акустико-эмиссионный метод;
2) вибрационно-диагностический метод;
3) шумодиагностический метод.
Акустико-эмиссионный метод основан на явлении акустической эмиссии – излучение упругих волн материалом в результате внутренней динамической локальной перестройки его структуры (возникновение и развитие трещин, движение дислокаций и т.п.).
3 – объект контроля, 4 – приемники, 5 – усилители, 6 – блок обработки информации с индикатором
Рисунок 8 – Акустико-эмиссионный метод дефектоскопии
В вибрационно-диагностическом методе анализируют параметры вибрации какой-либо детали или узла (ротора, подшипников, лопатки турбины и т.п.) с помощью приемников контактного типа, а в шумодиагностическом методе изучают спектр шумов работающего механизма с помощью микрофонных приемников.
На рисунке 9 представлены схемы конструкции различных типов пьезоэлектрических преобразователей.
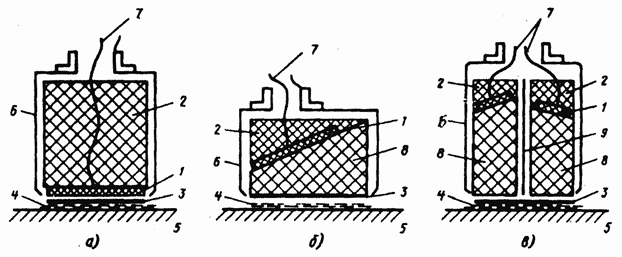
1 – пьезоэлемент, 2 – демпфер, 3 – протектор, 4 – слой контактной жидкости, 5 – контролируемый объект, 6 – корпус, 7 – электрические выводы, 8 – призма, 9 – акустический экран
Рисунок 9 – Схемы конструкции пьезоэлектрических преобразователей:
а) прямой совмещенный; б) наклонный; в) раздельно-совмещенный
Прямые совмещенные преобразователи служат для излучения и приема продольных ультразвуковых волн. При этом обе функции выполняет один пьезоэлемент.
В раздельно-совмещенных преобразователях для излучения и приема продольных волн используют разные пьезоэлементы, смонтированные в общем корпусе. Применяют также раздельные преобразователи, один из которых только излучает, а второй только принимает ультразвуковые волны.
Для контроля с помощью поперечных и поверхностных волн, а также волн Лэмба используют наклонные преобразователи. Волны необходимого типа возбуждаются в контролируемом изделии путем трансформации продольных волн, падающих на границу раздела «преобразователь – изделие» под определенным углом β. Например, при βкр1 < β < βкр2, где βкр1 и βкр2 – первый и второй критические углы, в контролируемое изделие проходят только поперечные волны. При приеме происходит обратная трансформация.
В качестве материала пьезоэлементов обычно используют керамику типа ЦТС (цирконат-титанат свинца) или ТБ (титанат бария).
С целью гашения свободных колебаний пьезоэлемента, уменьшения длительности зондирующего импульса и расширения полосы пропускания с нерабочей стороны пьезоэлемента приклеивают демпфер. Материал демпфера должен обладать волновым сопротивлением, близким к волновому сопротивлению пьезоэлемента, и большим коэффициентом затухания. Демпферы обычно изготавливают из композиционных материалов, состоящих из связующего материала и рассеивателей. В качестве связующего материала обычно используют эпоксидные смолы, а в качестве рассеивателей – порошки тяжелых металлов, например, вольфрама.
Для защиты пьезоэлемента от истирания и повреждения с рабочей стороны к нему приклеивают или припаивают протектор, который должен обладать высокой износостойкостью, иметь толщину λ/4 и волновое сопротивление Z = (Z1Z2)1/2, где Z1 – волновое сопротивление пьезоэлемента, Z2 – волновое сопротивление контактной жидкости.
Для получения так называемых B-эхограмм, то есть изображений дефектов в определенном сечении изделия используют фазированные решетки. Фазированные решетки позволяют производить угловое отклонение (сканирование) ультразвукового пучка и его фокусировку на различных глубинах без механического перемещения преобразователя и использования специальных фокусирующих элементов.
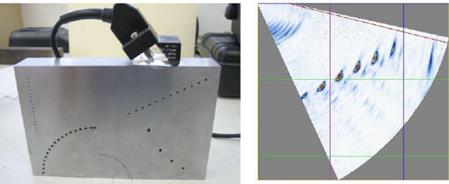
Рисунок 10 – Исследование образца с искусственными дефектами (отверстиями) с помощью фазированной решетки и его B-эхограмма
Перспективными являются бесконтактные способы возбуждения и приема ультразвуковых волн, к которым относятся лазерные методы и электромагнитные методы.
Для возбуждения ультразвука с помощью лазерного метода используются лазеры с большой мощностью в импульсе и малой длительностью импульсов (от десятков наносекунд до фемтосекунд – 10-15 с), например, твердотельный Nd:ИАГ-лазер, работающий в режиме модуляции добротности, CO2-лазер или эксимерные лазеры.
В основу метода модуляции добротности положено намеренное «ухудшение» свойств оптического резонатора во время накачки, не дающее лазеру излучать. Последующее быстрое «улучшение» свойств резонатора приводит к излучению накопленной энергии в виде короткого, мощного импульса. Существуют следующие способы модуляции добротности:
1) С помощью зеркал. Одно из зеркал резонатора делают вращающимся вокруг оси, перпендикулярной оси лазера. Резонатор будет обладать высокой добротностью только в положении вращающегося зеркала, параллельном неподвижному зеркалу.
2) С использованием акустооптического модулятора (дефлектора). Луч попадает на зеркало резонатора только при включенном дефлекторе. Поэтому включенное состояние дефлектора соответствует высокой добротности, а выключенное – низкой.
3) С использованием поляризаторов. Между зеркалами резонатора устанавливают поляризатор и ячейку Керра или Поккельса, которые позволяют управлять преломлением поляризованного луча с помощью электрического поля.
Большинство эксимерных лазеров основано на использовании галоидов благородных газов и применительно к ним использование термина «эксимер» (возбужденный димер) является некорректным, так как димер – это молекула, состоящая из двух идентичных или сходных частей. Более корректным (но редко употребляемым) термином является эксиплексный лазер (exciplex, возбужденный комплекс). В эксимерных лазерах используется смесь благородного газа (аргон, криптон или ксенон) с реактивным газом (фтор, хлор или бром). При электрическом возбуждении и высоком давлении в смеси возникают псевдомолекулы, называемые эксиплексами, которые могут существовать только в возбужденном энергетическом состоянии и при распаде создают ультрафиолетовое лазерное излучение.
Возбуждение упругих волн происходит в результате теплового расширения (термоупругий режим) или абляции. Частотный спектр генерируемого ультразвука частично определяется частотным спектром лазерных импульсов с увеличением частот при сокращении длительности импульсов.
Для регистрации ультразвука с помощью лазерного метода используются интерферометры. В случае если поверхность исследуемого объекта является зеркальной, она может выполнять функцию одного из зеркал оптического резонатора интерферометра, например, интерферометра Майкельсона (рисунок 11).

Рисунок 11 – Регистрация ультразвука с помощью интерферометра Майкельсона
В случае шероховатых поверхностей используют интерферометр с конфокальным резонатором Фабри-Перо (P. Gregorčič. Ultrasound detection with Fabry-Perot interferometer: Seminar. University of Ljubljana. 2005).

 (c)
(c)
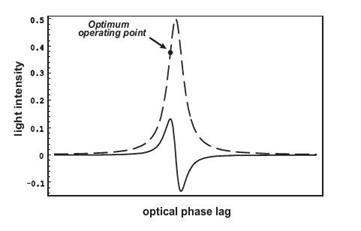
Рисунок 12 – Конфокальный резонатор Фабри-Перо (a), зависимость коэффициента пропускания от частоты (b), зависимость коэффициента пропускания и его производной от расстояния между зеркалами (c)
Резонатор состоит из двух полупрозрачных сферических зеркал, расстояние между которыми примерно равняется радиусу кривизны. Лазерное излучение, рассеянное поверхностью контролируемого объекта, входит в резонатор в точке 1. Интенсивность излучения, выходящего из точек 1 и 2, анализируется при использовании резонатора в режиме пропускания, а интенсивность излучения, выходящего из точек 3 и 4, – при использовании резонатора в режиме отражения. В результате многократных отражений луча в резонаторе интенсивность излучения, выходящего из любой из точек резонатора, будет определяться как результат сложения смещенных по фазе волн с убывающей интенсивностью, соответствующих последовательным прохождениям лучей через рассматриваемую точку. Зависимость интенсивности от частоты и расстояния между зеркалами будет иметь периодический резонансный характер. В результате эффекта Доплера при отражении лазерного излучения от колеблющейся поверхности будет изменяться его частота, что будет приводить к изменению коэффициента пропускания (отражения) излучения в резонаторе. При заданной частоте излучения (длине волны лазера) максимальная чувствительность резонатора достигается при расстоянии между зеркалами, соответствующем максимальному наклону (точке перегиба) резонансной кривой. Регулировка чувствительности резонатора может осуществляться путем смещения одного из зеркал с помощью пьезоэлемента.
Достоинством лазерного метода генерации ультразвука является возможность генерации очень высоких частот (свыше 100 МГц). Ультразвук с такими частотами имеет малую проникающую способность, но обеспечивает высокое разрешение. Существуют фазированные решетки, основанные на лазерной генерации ультразвука. Такие решетки основаны либо на сканировании лазерного луча с помощью зеркала по поверхности объекта (в этом случае получается виртуальная фазированная решетка, так как в роли элементов решетки выступает подвижный фокус), либо на использовании в качестве элементов решетки оптических волокон (рисунок 13).

Рисунок 13 – Фазированная решетка, основанная на лазерной генерации ультразвука
В изображенной на рисунке 3-хэлементной фазированной решетке пучок оптических волокон, по которому распространяется лазерное излучение, делится на три линии, имеющие длины, различающиеся на 50 м, что обеспечивает фазовое смещение (оптические линии задержки). На конце каждой из линий волокна располагаются линейным образом, в результате чего создаются три линейных источника ультразвука, сложение волн от которых дает плоский волновой фронт, распространяющийся по отношению к поверхности объекта контроля под углом, определяемым разностью оптических длин линий.
Принцип действия электромагнитных акустических преобразователей (ЭМАП) основан на генерации в материалах с высокой электропроводностью вихревых токов с помощью переменного магнитного поля и воздействии на эти токи сил Лоренца со стороны постоянного магнитного поля (подмагничивающего поля). Основными элементами конструкции преобразователя являются катушка для создания переменного магнитного поля и постоянный магнит для создания подмагничивающего поля. Плотность f сил, действующих на элемент объема материала, определяется выражением
f = J × B,
где J – плотность вихревого тока, B – индукция подмагничивающего поля.
Векторы f, J и B являются попарно ортогональными. В связи с этим, если индукция подмагничивающего поля направлена перпендикулярно поверхности, то генерируются поперечные волны, направление распространения которых перпендикулярно поверхности, а направление колебательных смещений параллельно поверхности и перпендикулярно вектору плотности вихревого тока. Если индукция подмагничивающего поля направлена параллельно поверхности и перпендикулярно вектору плотности вихревого тока, то генерируются продольные волны, направление распространения которых перпендикулярно поверхности и совпадает с направлением колебательных смещений.
Преимуществами ЭМАП являются:
1) Отсутствие необходимости в контактной жидкости. Делает возможным применение преобразователей при температурах ниже точки замерзания и выше точки кипения контактных жидкостей.
2) Меньшая (по сравнению с пьезоэлектрическими преобразователями) чувствительность к состоянию поверхности. Пьезоэлектрические преобразователи требуют низкой шероховатости поверхности.
Недостатками являются:
1) Возможность использования только для материалов с высокой электропроводностью.
2) Низкая (по сравнению с пьезоэлектрическими преобразователями) эффективность преобразования.
3) Большие размеры.
Для создания сильного подмагничивающего поля используются редкоземельные самарий-кобальтовые и неодимовые магниты или импульсные электромагниты.
В зависимости от схемы подмагничивания возможно возбуждение как продольных, так и поперечных волн (рисунок 14).

Рисунок 14 – Различные схемы подмагничивания в ЭМАП
Регистрация ультразвука с помощью ЭМАП основана на факте, что при движении в постоянном магнитном поле B элемента объема dV проводящего объекта контроля в этом элементе будет протекать вихревой ток, который будет индуцировать в наложенной на объект приемной катушке ЭДС. Как и при излучении, путем выбора схемы подмагничивания можно добиться приема как продольных, так и поперечных волн.
Вихретоковая дефектоскопия. Принцип действия вихретоковых дефектоскопов основан на возбуждении в контролируемом объекте вихревых токов с помощью переменного магнитного поля, создаваемого катушкой, по которой протекает переменный электрический ток.
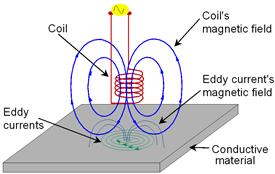
Рисунок 15 – Принцип действия вихретокового дефектоскопа
Вихревые токи создают собственное переменное магнитное поле, которое может быть зарегистрировано с помощью второй катушки, либо по изменению импеданса возбуждающей катушки в результате взаимоиндукции (исследуемый материал можно представить себе как проводник с током, изменение которого индуцирует ЭДС в контуре возбуждающей катушки). Для вихревых токов характерен скин-эффект, то есть они проникают в материал лишь на небольшую глубину, определяемую выражением
δ = (πfμσ)-1/2,
где f – частота магнитного поля, μ – абсолютная магнитная проницаемость материала, σ – удельная электропроводность материала.
В связи с этим вихретоковый метод эффективен лишь при выявлении поверхностных дефектов. Диапазон используемых частот составляет от нескольких кГц до нескольких МГц в зависимости от требуемой глубины проникновения. Наличие дефектов приводит к изменению амплитуды и фазы магнитного поля вихревых токов. Помимо выявления дефектов вихретоковый метод может использоваться для контроля электрических и магнитных свойств материалов, а также для измерения толщины неэлектропроводных покрытий на электропроводных материалах.
(Интересный факт: Вихревые токи используются в торговых автоматах, управляемых с помощью монет, для идентификации подлинности монет. При падении монеты стационарный постоянный магнит индуцирует в ней вихревые токи, взаимодействие поля которых с полем постоянного магнита замедляет скорость падения. При этом степень замедления будет зависеть от электропроводности материала монеты, которая будет различаться у подлинных и фальшивых монет)
Достоинствами вихретоковой дефектоскопии являются:
1) Отсутствие необходимости контакта между датчиком и изделием.
2) Возможность контроля изделий сложной геометрической формы.
3) Минимальные требования к подготовке поверхности.
Недостатками являются:
1) Возможность контроля только для электропроводных материалов.
2) Возможность нечувствительности к дефектам, расположенным параллельно направлению вихревых токов (рисунок 16).
3) Малая глубина проникновения.

Рисунок 16 – Взаимодействие вихревых токов с дефектами различных направлений
Одним из методов отображения данных в вихретоковой дефектоскопии является метод импедансной плоскости, в котором изменение импеданса возбуждающей катушки при приближении к поверхности изображается в виде кривой на плоскости R-XL (рисунок 17).
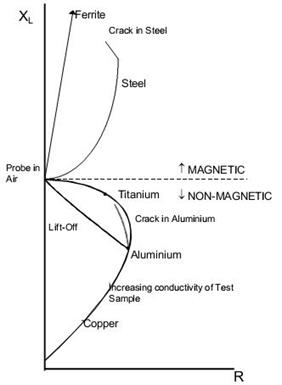
Рисунок 17
При контроле немагнитных материалов, например, алюминия, меди и титана, при приближении катушки к поверхности активное сопротивление возрастает (так как энергия от катушки расходуется на возбуждение вихревых токов), а индуктивность – уменьшается (так как вихревые токи создают магнитное поле, противоположное по направлению магнитному полю катушки). При контроле магнитных материалов, например, стали, активное сопротивление катушки также возрастает, но в отличие от случая немагнитных материалов наблюдается рост индуктивности. Это объясняется тем, что магнитная проницаемость материала концентрирует магнитное поле катушки и эффект концентрации оказывается намного сильнее эффекта роста магнитного поля вихревых токов. При наличии дефектов активное сопротивление будет снижаться, так как дефекты будут препятствовать формированию вихревых токов.
При внешнем контроле труб и стержней возбуждающая катушка наматывается вокруг контролируемого изделия (рисунок 18). При внутреннем контроле труб катушка наматывается на стрежень, вводимый в трубу.
Рисунок 18
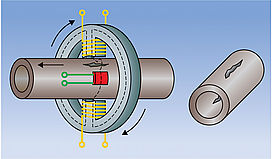
Для контроля труб и стержней также могут использоваться катушки с радиальным расположением оси. В этом случае катушка должна вращаться и перемещаться в осевом направлении относительно изделия (рисунок 19).

Рисунок 19
Катушки с подковообразным сердечником возбуждают вихревые токи в плоскости, перпендикулярной поверхности изделия, и чувствительны к расслоениям (рисунок 20).
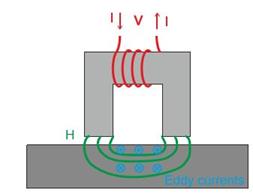
Рисунок 20
Датчики для вихретокового контроля могут включаться по абсолютной и дифференциальной схемам (рисунок 21).
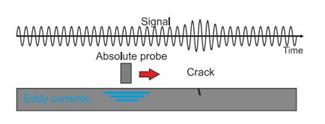
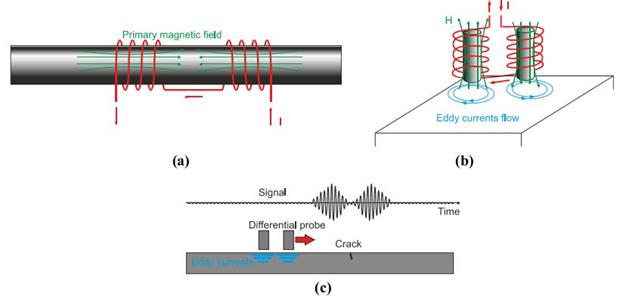
Рисунок 21
При использовании абсолютной схемы возможно обнаружение протяженных дефектов и медленных размерных изменений в трубах и стержнях, невозможное при использовании дифференциальной схемы из-за близкого взаимного расположения датчиков. Дифференциальная схема позволяет выявлять очень малые дефекты.
Включение датчиков для вихретокового контроля может осуществляться в сбалансированный мост (2 активных сопротивления + 2 индуктивности), несбалансированный мост (3 активных сопротивления + 1 индуктивность) или цепь из последовательно включенных активного сопротивления и индуктивности.
В импульсном вихретоковом методе через катушку возбуждения пропускается не синусоидальный ток, а ток в виде прямоугольных, треугольных или пилообразных импульсов. Такие импульсы имеют широкий частотный спектр. При этом каждой частоте соответствует определенная глубина проникновения, что позволяет по спектру регистрируемого сигнала определять глубину расположения дефектов.
Метод рассеяния магнитного потока – метод НРК, используемый для обнаружения коррозии и питтинга (коррозионные углубления (ямы) на поверхности металла) в стальных конструкциях, чаще всего трубопроводах и цистернах. Образец локально или полностью намагничивается и, если материал не имеет дефектов, то магнитный поток проходит главным образом внутри материала. При наличии дефектов магнитное поле искажается, приводя к рассеянию магнитного потока (его выходу из материала образца) вблизи дефектов.

Рисунок 18
Силовые линии намагничивающего поля должны располагаться под большим углом к предполагаемому направлению дефектов. Поэтому для выявления дефектов различных направлений обычно проводят последовательный контроль при различных (например, взаимно перпендикулярных) направлениях намагничивающего поля. Намагничивающее поле может создаваться с помощью постоянных магнитов, а также электромагнитов, питаемых постоянным или переменным током. Также может использоваться намагничивание путем прямого пропускания электрического тока через образец. В качестве примера на рисунке 19 приведена схема контроля труб на наличие продольных и поперечных дефектов с намагничиванием с помощью электромагнитов.
 а)
а) 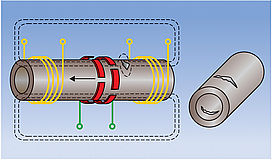 б)
б)
Рисунок 19
При поиске продольных дефектов (рисунок 19а) используется электромагнит с круговым магнитопроводом и радиальными полюсными наконечниками, который создает в стенке трубы круговое магнитное поле. Электромагнит с датчиком магнитного поля рассеяния вращается и перемещается в осевом направлении относительно трубы. При поиске поперечных дефектов (рисунок 19б) используются две катушки, намотанные вокруг трубы и создающие в стенке трубы продольное магнитное поле. При этом в качестве магнитопровода выступает сама труба. Датчики магнитного поля рассеяния, расположенные в виде круговой матрицы, перемещаются в осевом направлении относительно трубы.
В контроле с помощью магнитных частиц (магнитопорошковом контроле) также используется рассеяние магнитного потока дефектами. Магнитное поле рассеяния притягивает к себе магнитные частицы, наносимые на поверхность изделия. В случае дефектов, выходящих на поверхность изделия, магнитные частицы проникают в дефекты, улучшая их видимость. В качестве магнитных частиц обычно используется порошок оксида железа.

Рисунок 20 – Коррозионные трещины в трубе, выявленные с помощью магнитных частиц; для повышения контрастности труба предварительно покрыта белой фоновой краской

Рисунок 21 – Магнитопорошковый контроль сварного шва с использованием аэрозоля; подмагничивание производится ручным электромагнитом
Частицы могут наноситься в сухом состоянии путем распыления, в виде волной или масляной суспензии или в виде аэрозоля. Частицы, наносимые в виде суспензий, могут иметь флуоресцентные покрытия, дающие в ультрафиолетовом свете зеленую или желтую флуоресценцию. Частицы наносятся в момент действия намагничивающего поля. Нанесение суспензии после прекращения действия поля приводит к смыванию индикаторов дефектов. Для повышения контрастности индикаторов перед контролем на изделие может наноситься белая фоновая краска. После выполнения контроля изделие подвергается размагничиванию.
Феррозондовые датчики (fluxgate sensors) состоят из двух катушек (катушки возбуждения и чувствительной катушки), намотанных на сердечник из магнитно-мягкого материала. Катушка возбуждения питается переменным напряжением, а в чувствительной катушке при наличии внешнего поля индуцируется ЭДС, амплитуда четных гармоник которой дает информацию о напряженности поля.
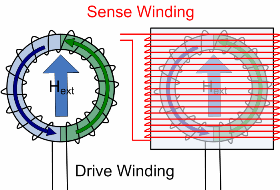
Для удобства описания кольцевой сердечник представлен состоящим из двух половин, в одной из которых катушка возбуждения создает магнитное поле с напряженностью того же направления, что и внешнее поле Hext, а во второй – магнитное поле с напряженностью противоположного направления (так как магнитное поле, создаваемое катушкой возбуждения, является переменным, то ориентация этого магнитного поля относительно внешнего магнитного поля для каждой из половин сердечника может изменяться во времени). Катушка возбуждения питается напряжением, пример которого показан на рисунке …а.

Передний и задний фронты в действительности имеют меньшую длительность и удлинены для более наглядного представления изменения индукции поля B в половинах сердечника. При отсутствии внешнего магнитного поля (рисунок …б) правая и левая половины сердечника приходят в насыщение одновременно и поля B, создаваемые ими, компенсируют друг друга. Сигнал в чувствительной катушке при этом отсутствует. При наличии внешнего магнитного поля (рисунок …в) половина сердечника, в которой катушка возбуждения создает магнитное поле, противоположное по направлению по отношению к внешнему магнитному полю, выходит из насыщения быстрее второй половины, для которой направления внешнего магнитного поля и поля катушки возбуждения совпадают. В связи с этим на интервале времени между моментами выхода из насыщения обеих половин сердечника будет наблюдаться изменение суммарной индукции магнитного поля и в чувствительной катушке будет возникать ЭДС (рисунок …г). На каждый период напряжения питания будет приходиться 4 импульса в чувствительной катушке, то есть частота сигнала будет в два раза больше частоты напряжения питания.
Магнитометры с оптической накачкой основаны на взаимодействии паров щелочных металлов (Cs, Rb, K) с оптическим излучением. Атом цезия имеет во внешней электронной оболочке один неспаренный электрон, который обладает магнитным моментом. Во внешнем магнитном поле вектор магнитного момента электрона может принимать только строго определенные (квантованные) ориентации относительно направления магнитного поля. При этом различным ориентациям соответствуют различные значения энергии. В связи с этим энергетические уровни электрона расщепляются на подуровни (эффект Зеемана). При поглощении света определенной длины волны, в качестве источника которого используется электроразрядная цезиевая лампа, электроны могут переходить с зеемановских подуровней основного энергетического состояния в возбужденное энергетическое состояние. Так как возбужденное энергетическое состояние является неустойчивым, то электроны возвращаются из него на подуровни основного энергетического состояния, что сопровождается испусканием света. Так как испускаемый свет по направлению не совпадает с поглощенным светом, то сигнал на фотодетекторе, регистрирующем свет, прошедший через ячейку от источника, будет слабым («непрозрачное» состояние ячейки). Спустя некоторое время все электроны скапливаются на нижнем подуровне основного энергетического состояния, что делает невозможным поглощение, и ячейка переходит в «прозрачное» состояние с сильным сигналом н
Дата добавления: 2017-01-16; просмотров: 10564;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
