Автоматизированные системы УВД (АС УВД)
Важнейшую роль в обеспечении высокой регулярности и безопасности полетов играет четкость и надежность управления движения ВС. Однако традиционные способы УВД становятся недостаточно эффективными при большой интенсивности воздушного движения из-за ограниченных возможностей человека по управлению движением большого числа ВС.
Характер работы диспетчера принципиально не меняется, но ее напряженность резко возрастает, он уже не в состоянии справиться с огромным объемом информации, которая поступает к нему от большого числа ВС по различным каналам и в разной форме. Увеличение числа диспетчеров не решает задачи, так как при этом возникает новая проблема по координации их действий. Для упрощения и облегчения работы диспетчера его нужно освободить от функций сбора, хранения и обработки информации, оставив за ним лишь функцию принятия наиболее важных решений по УВД. В таком виде эта задача решается путем автоматизации процессов УВД на основе применения современных радиоэлектронных средств и вычислительной техники.
Структура АС УВД
АС УВД выполняет разнообразные функции по переработке большого объема информации и состоит из ряда отдельных комплексов и подсистем (рис.68):
- подсистема сбора информации ПСИ;
- подсистема связи и передачи информации ПСПИ;
- вычислительный комплекс ВК;
- подсистема отображения информации;
- подсистема связи с ВС ПСВС.
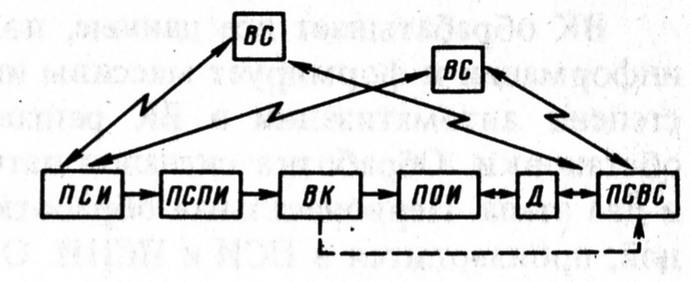
Рис. 68. Структурная схема АС УВД
Важным звеном АС УВД является диспетчер, замыкающий контур управления. В зависимости от вида системы и степени автоматизации каждая из подсистем может иметь различную структуру и функции, но для всех АС УВД эти подсистемы имеют общие задачи и отличительные признаки.
ПСИ включает датчики информации различных типов, позволяющие измерять координаты ВС, получать метеоинформацию, сообщения из соседних центров УВД. Информация, используемая в процессе УВД, подразделяется на статическую и динамическую. Статическая информация не меняется работы системы и включает параметры ВС и трасс. Она вводиться в ВК на этапе подготовки системы к эксплуатации, но при необходимости может корректироваться и в процессе эксплуатации. К динамической, т.е. изменяющейся, информации относятся координаты ВС, высота полета, бортовой номер или номер рейса, остаток топлива, сообщения об аварийной ситуации или отказе радиосредств, метеорологические данные. Все эти данные должны вводиться в систему автоматически в течение всего времени работы, т.е. по существу непрерывно.
Промежуточное положение между статической и динамической информацией занимают планы полетов, так как они могут корректироваться в процессе полета. План полета должен содержать номер ВС, номер трассы, время вылета, пролета контрольных пунктов и прибытия в пункт назначения, запас топлива и сведения о наличии на борту ответчика. Оперативно должны вводиться в систему планы внерейсовых полетов, передаваемых из других центров УВД. Планы полетов для рейсов, выполняемых по расписанию, вводятся заранее и корректируются относительно редко. Сигналы от отдельных датчиков ПСИ имеют различную природу. Некоторые сигналы представлены в аналоговой, другие - в дискретной форме. При этом способы кодирования дискретных сигналов могут быть разными. Для преобразования всех, поступающих от ПСИ сигналов, к единому виду, пригодному для ввода в ВК служит подсистема связи и передачи информации ПСПИ. На выходе этой подсистемы вся информация представляется в цифровых кодах, с которыми оперирует ЦВМ ВК. Дополнительно ПСПИ обеспечивает связь персонала центра управления со всеми взаимодействующими службами.
ВК обрабатывает все данные, поступающие от различных датчиков и формируют массивы информации для ПОИ. При высокой степени автоматизации в ВК решаются и задачи анализа воздушной обстановки. Обработка сигналов датчиков происходит в два этапа. Первоначальная обработка информации, называемая первичной, производится в ПСИ и ПСПИ. Основная цель этой обработки - очистка сигналов от помех и получение данных в форме машинных кодов. Второй этап осуществляется в ВК и называется вторичной обработкой, основная цель которой - получение возможно более полных данных о траекториях движения всех ВС, находящихся в зоне управления.
ПОИ предназначена для отображения воздушной обстановки в наиболее удобной для восприятия форме. В АС УВД координатная информация отображается в графической, т.е. аналоговой, форме, а дополнительная - в цифровой (рис. 69).
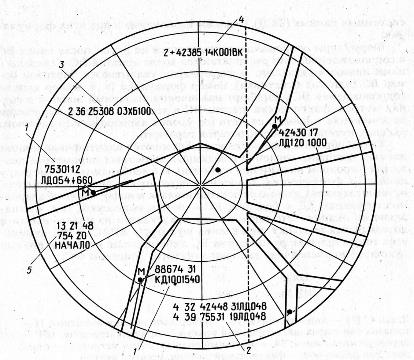
Рис. 69. Совмещенный план-индикатор
1 - формуляры сопровождения; 2 - формуляр ожидания прилетающего ВС; 3 - формуляр ожидания вылетающего ВС; 4 - табличный формуляр; 5 - таблица системных данных
С помощью ПОИ решаются также задачи активного взаимодействия диспетчера с ВК. ПСВС обеспечивает передачу команд управления на ВС, обмен сообщениями между экипажами ВС и службой УВД, а также получение и ввод в ВК некоторых данных с борта ВС.
Классификация АС УВД
АС УВД классифицируются по ряду признаков. Основными из них являются область применения, назначение, степень автоматизации (номенклатура автоматизированных функций) и способ получения информации о параметрах движения ВС.
В зависимости от сферы применения АС УВД различают:
- трассовые (районные);
- аэродромные;
- аэроузловые.
По назначению АС УВД разделяются на:
- АС планирования воздушного движения (АС ПВД);
- АС непосредственного управления воздушным движением (АС УВД);
- совмещенные (АС ПВД и УВД);
- АС управления наземным движением.
По степени автоматизации АС УВД разделяются::
- системы малой (частичной) автоматизации (МАСУВД);
- системы 1-го уровня автоматизации;
- системы 2-го уровня автоматизации;
- системы 3-го уровня автоматизации.
По способу получения координатной информации АС УВД делят:
- системы радиолокационного контроля;
- системы процедурного контроля .
Эксплуатационно-технические характеристики (ЭТХ) АС УВД
Эксплуатационно-техническими характеристиками принято называть показатели, отображающие сведения о сфере применения, функциях, Эксплуатационно-технических возможностях и качестве функционирования АС УВД. ЭТХ основных типов АС УВД, эксплуатируемых в Росси, приведены в таблице 14.
Таблица 14
| Показатели | Типы АС УВД | ||||||||
| Аэродромные | Аэроузловые | Районные | |||||||
| “Старт” | “Теркас” Мин. Воды | “Теркас” Киев | “Спектр” | “Теркас” Москва | “Теркас” Москва | “Трасса” | “Стрела” | ||
| Размеры зоны управления, тыс. км2 | |||||||||
| Число секторов управления | |||||||||
| подхода | - | - | - | ||||||
| круга | - | - | - | ||||||
| посадки | - | - | - | - | - | - | |||
| старта | - | - | - | - | - | - | - | ||
| руления | - | - | - | - | - | - | - | ||
| Число р/локационных позиций | |||||||||
| Число ВС, сопровождаемых системой ПРЛС | |||||||||
| Число ВС, сопровождаемых системой ВРЛ | - | - | - | - | - | ||||
| Число обрабатываемых планов полетов: | |||||||||
| стандартных | - | - | |||||||
| суточных | - | - | |||||||
| текущих | - | - | |||||||
Дата добавления: 2017-01-08; просмотров: 11122;
Поиск по сайту
Узнать еще
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ
- II. ЭЛЕКТРИЧЕСКИЙ ДИПОЛЬ. ДИПОЛЬНЫЙ МОМЕНТ СИСТЕМЫ ЭЛЕКТРИЧЕСКИХ ЗАРЯДОВ
- III. Избирательные системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
