Нелинейные автоматические системы
Управления
Автоматическая система регулирования, в состав которой включены звенья, име-ющие нелинейную статическую характеристику, называется нелинейной. В данном случае речь идёт о существенно нелинейных звеньях, статические характеристики которых не могут быть линеаризованы известными методами без потери их су-щественных особенностей. В настоящее время из всего многообразия нелинейных характеристик выделен класс существенно нелинейных, которые могут быть отне-сены к типичным нелинейностям. Такие характеристики включают зоны нечувст-вительности, насыщения, гистерезиса и т.п. Существенно нелинейными могут быть характеристики различных звеньев системы регулирования: датчиков, исполни-тельных механизмов, регуляторов. Широкое применение в автоматизации произ-водственных процессов получили нелинейные системы регулирования с регулято-рами, имеющими релейную статическую характеристику. Это так называемые сис-темы позиционного регулирования.
Сигнал на выходе позиционного регулятора в зависимости от величины входного сигнала может принимать одно из двух возможных постоянных значений ymax или ymin . Последнее в частном случае может равняться нулю. На рис.32 приведена релейная характеристика.
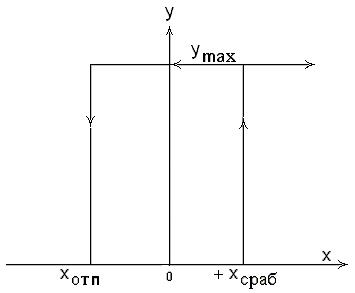
Рис. 32. Статистическая характеристика
позиционного регулятора.
При достижении входным сигналом величины порога срабатывания  вы-ходной сигнал изменяется скачкообразно от минимального
вы-ходной сигнал изменяется скачкообразно от минимального  до максимального
до максимального  значения. При дальнейшем увеличении входного сигнала выходная величина не изменяется, сохраняя своё максимальное значение . Если теперь уменьшать входной сигнал, то при достижении им порога отпускания
значения. При дальнейшем увеличении входного сигнала выходная величина не изменяется, сохраняя своё максимальное значение . Если теперь уменьшать входной сигнал, то при достижении им порога отпускания  выходной сигнал уменьшится скачком до минимальной величины . Разность
выходной сигнал уменьшится скачком до минимальной величины . Разность =
=  -
-  назы-вают зоной неоднозначности. Характеристику, подобную изображённой на рис.32, имеет позиционный пневматический регулятор системы «Старт» ПР 1.5. Последняя модификация этого регулятора ПР 1.6 позволяла изменять величину зоны неод-нозначности.
назы-вают зоной неоднозначности. Характеристику, подобную изображённой на рис.32, имеет позиционный пневматический регулятор системы «Старт» ПР 1.5. Последняя модификация этого регулятора ПР 1.6 позволяла изменять величину зоны неод-нозначности.
В качестве примера рассмотрим работу автоматической системы регулирования уровня жидкости в ёмкости с позиционным регулятором ПР 1.6, функциональная и структурная схемы которой показаны на рис.33.
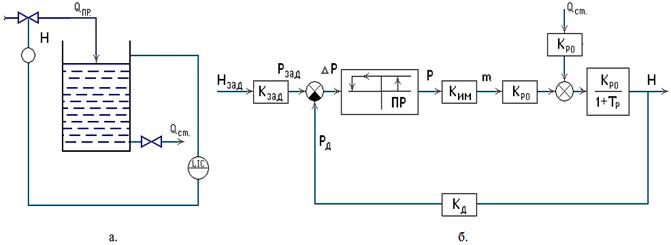
Рис. 33. Автоматическая система регулиированияуровня
С позиционным регулятором:
а. – функциональная схема; б. – структурная схема.
Проиллюстрируем работу системы регулирования графиками. Когда уровень жидкости в ёмкости в результате стока упадёт ниже заданного значения  и ве-личина ошибки регулирования
и ве-личина ошибки регулирования  достигает зна-чения
достигает зна-чения  , где
, где  – коэффициент усиления задающего устройства, сиг-нал на выходе регулятора примет в соответствии с его статической характеристи-кой своё максимальное значение
– коэффициент усиления задающего устройства, сиг-нал на выходе регулятора примет в соответствии с его статической характеристи-кой своё максимальное значение  . В результате этого клапан подачи жид-кости в ёмкость полностью откроется и расход жидкости на входе в ёмкость до-стигнет своего максимального значения
. В результате этого клапан подачи жид-кости в ёмкость полностью откроется и расход жидкости на входе в ёмкость до-стигнет своего максимального значения  . Так как максимальное значение расхода на притоке выбирают большим, чем номинальное значение расхода на стоке
. Так как максимальное значение расхода на притоке выбирают большим, чем номинальное значение расхода на стоке  , то уровень будет возрастать и к моменту времени
, то уровень будет возрастать и к моменту времени  превысит заданное значение. При этом сигнал на входе регулятора достигнет порога отпускания =
превысит заданное значение. При этом сигнал на входе регулятора достигнет порога отпускания =  . В соответствии со статической характеристикой регулятора сигнал на его выходе примет своё минимальное значение =
. В соответствии со статической характеристикой регулятора сигнал на его выходе примет своё минимальное значение =  = 0. Это приведёт к закрытию клапана подачи на притоке и к уменьшению расхода через него до нуля. Под действием расхода на стоке уровень начинает падать до момента
= 0. Это приведёт к закрытию клапана подачи на притоке и к уменьшению расхода через него до нуля. Под действием расхода на стоке уровень начинает падать до момента  , после чего все процессы повторяются. Соответствующие переходные процессы приведены на рис. 34.
, после чего все процессы повторяются. Соответствующие переходные процессы приведены на рис. 34.
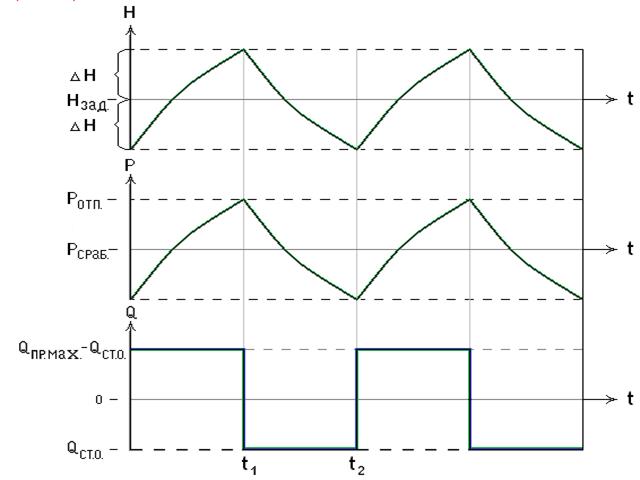
Рис. 34. Переходные процессы в автоматической системе
регулирования с позиционным регулятором.
В установившемся состоянии, что имеем место при постоянном расходе жид-кости на стоке, в автоматической системе регулирования с позиционным регуля-тором возникают автоколебания регулируемой величины относительно её за-данного значения. Диапазон колебаний регулируемой величины  и период колебаний
и период колебаний  можно изменять, меняя параметры статической характеристики ре-гулятора (
можно изменять, меняя параметры статической характеристики ре-гулятора (  и
и  ).
).
Если по условиям технологии необходимо строго поддерживать заданное значе-ние регулируемой величины, то применяют линейные системы регулирования с не-прерывными регуляторами. Если же допустимы колебания регулируемой величины в пределах  , то предпочтение отдаётся более простым и дешёвым позиционным регуляторам.
, то предпочтение отдаётся более простым и дешёвым позиционным регуляторам.
Дата добавления: 2021-04-21; просмотров: 447;
Поиск по сайту
Узнать еще
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Филогенез эндокринной системы.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- L.3. Состояние российской системы образования и необходимость ее
- T-FlexCAD (Топ Системы, Москва) и др.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
