Глава 9. Мореходность гидросамолета
Мореходные качества {мореходность) гидросамолета характеризуют возможность его эксплуатации
в акваториях с определенными гидрометеорологическими условиями — скоростью и направлением ветра, направлением, скоростью движения, формой, высотой и длиной волн воды.
Мореходность гидросамолета оценивается предельным волнением акватории, при котором возможна безопасная эксплуатация.
Аналогично тому, как для оценки летных характеристик самолета применяется международная
стандартная атмосфера (МСА), для характеристики волнения акватории используется определенная шкала (математическая модель), устанавливающая связь между словесной характеристикой волнения, высотой волны и баллом (от 0 до IX) — степенью волнения.
В соответствии с этой шкалой, например, слабое волнение (высота волны до 0,25 м) оценивается баллом I, значительное волнение (высота волны 0,75-1,25 м) оценивается баллом III, сильное волнение (высота волны 2,0-3,5 м) оценивается баллом V, исключительное волнение (высота волны 11м) оценивается баллом IX.
Мореходные качества (мореходность) гидросамолета включают в себя такие характеристики гидросамолета, как плавучесть, остойчивость, управляемость, непотопляемость и т. п.
Эти качества определяются формой и размерами находящейся под водой водоизмещающей части (лодки или поплавка) гидросамолета, распределением масс гидросамолета по длине и высоте.
В дальнейшем при рассмотрении мореходных
характеристик гидросамолета, если их без особой оговорки в равной мере можно отнести к лодке и поплавку, будем использовать термин «лодка». |
Плавучесть — способность гидросамолета плавать в заданном положении относительно водной поверхности.
Гидросамолет, как и любое другое плавающее тело, например, судно, поддерживается на плаву архимедовой силой
P=W  в g = G,
в g = G,
где W — объем воды, вытесняемой лодкой, — объемное водоизмещение лодки, м
 в— плотность воды, вытесняемой лодкой, кг/м3;
в— плотность воды, вытесняемой лодкой, кг/м3;
W  в — масса воды, вытесняемой лодкой, — массовое водоизмещение лодки, кг;
в — масса воды, вытесняемой лодкой, — массовое водоизмещение лодки, кг;
g — ускорение свободного падения, м/с2.
G — сила тяжести гидросамолета, Н.
Сила тяжести гидросамолета G приложена в центре масс самолета (ц. м.), сила поддержания (архимедова сила, сила воздействия вытесненной жидкости на лодку гидросамолета) Р приложена в центре масс вытесненного лодкой объема воды, или, по корабельной терминологии (которой широко пользуются проектировщики гидросамолетов), в центре величины (ц.в.).
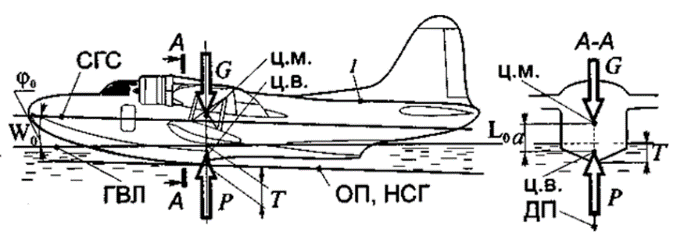
Рис. 9.1.. Гидросамолет на плаву
Очевидно, что для обеспечения равновесия самолета на плаву (рис.9.1) силы G и Р должны лежать на прямой, соединяющей ц.м. и ц.в., в вертикальной продольной плоскости симметрии гидросамолета — диаметральной плоскости лодки (ДП). Очевидно также, что основная плоскость лодки (ОП) — горизонтальная плоскость, проходящая через нижнюю точку поверхности лодки перпендикулярно к диаметральной
плоскости, и, соответственно, нижняя строительная горизонталь лодки (НСГ), строительная горизонталь самолета (СГС) и палуба 1 — верхняя поверхность лодки в общем случае не параллельны плоскости
водной поверхности и линии соприкосновения поверхности воды с корпусом лодки гидросамолета WoLo.
Линия соприкосновения спокойной поверхности воды с корпусом лодки гидросамолета WoLo при полной взлетной массе и выключенных двигателях — грузовая ватерлиния (от голл. water — вода и lijn — линия). Грузовая ватерлиния (ГВЛ) при плавании
в пресной воде не совпадает с ГВЛ при плавании
в морской воде, поскольку плотность пресной речной или озерной воды рв=1000 кг/м3, плотность морской воды рв = 1025 кг/м3.
Соответственно, осадка Т (расстояние от ГВЛ до самой нижней части лодки, характеризующее погружение лодки ниже уровня воды) при одинаковой взлетной массе гидросамолета в пресной воде будет больше, чем в морской.
Значения осадок носом и кормой определяют посадку лодки гидросамолета относительно поверхности воды — дифферент лодки (от лат. differetis — разница) — наклон ее в продольной V плоскости, который измеряется углом дифферента  0 или разностью между осадками кормы и носа. Если разность равна нулю, говорят, что лодка «сидит на ровном киле»; если осадка кормы больше осадки носа — лодка «сидит
0 или разностью между осадками кормы и носа. Если разность равна нулю, говорят, что лодка «сидит на ровном киле»; если осадка кормы больше осадки носа — лодка «сидит
с дифферентом на корму» (как показано на рис 9.1), если меньше — лодка «сидит с дифферентом на нос».
Остойчивость (аналог термина «устойчивость»
в морской терминологии) при плавании — способность гидросамолета, отклоненного внешними
возмущающими силами от положения равновесия,
возвращаться в исходное положение после прекращения действия возмущающих сил.
 Очевидно, что при плавании частично или вполне (полностью) погруженного в воду тела нет никаких других сил для возвращения его в положение равновесия, кроме силы тяжести G и равной ей силы
Очевидно, что при плавании частично или вполне (полностью) погруженного в воду тела нет никаких других сил для возвращения его в положение равновесия, кроме силы тяжести G и равной ей силы
поддержания Р. Следовательно, только взаимное положение этих сил определит остойчивость или неостойчивость плавающего тела, что иллюстрирует рис. 9.2.
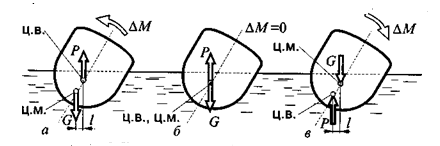
Рис.9.2. Понятие остойчивости плавающего тела
Если центр масс тела расположен ниже центра величины (рис.9.2, а), при отклонении от положения равновесия возникает стабилизирующий момент
ΔM = Gl, возвращающий тело в исходное положение остойчивого равновесия.
Если положение центра масс тела совпадает с положением центра величины (рис. 9.2, б), тело находится в безразличном равновесии.
Если центр масс тела расположен выше центра величины (рис.9.2, в), при отклонении от положения равновесия возникает дестабилизирующий момент M ΔM = Gl, и тело не может самостоятельно возвратиться в исходное положение неостойчивого равновесия.
Следует отметить, что положение центра величины существенным образом зависит от формы погруженной части тела и угла отклонения его от исходного положения равновесия.
Остойчивость гидросамолета (как и остойчивость судна) принято определять взаимным положением центра масс и метацентра — центра кривизны линии, по которой смещается центр величины водоизмещающего тела при выведении его из равновесия.
Метацентр — от греч. meta — между, после, через — составная часть сложных слов, означающих промежуточность, следование за чем-либо, переход к чему-либо другому, перемену состояния, превращение
и лат. — centrum средоточие, центр.
Различают поперечную и продольную остойчивость гидросамолета (при наклонении самолета соответственно в поперечной и продольной плоскостях).
Поперечная остойчивость. Рассмотрим случай поперечного наклонения — отклонение диаметральной плоскости лодки (ДП) от вертикали, например под воздействием порыва ветра.
Гидросамолет (рис.9.3,а) находится на плаву
в состоянии равновесия, сила тяжести G и сила поддержания Р равны, лежат в диаметральной плоскости, размер а определяет возвышение центра масс над центром величины.
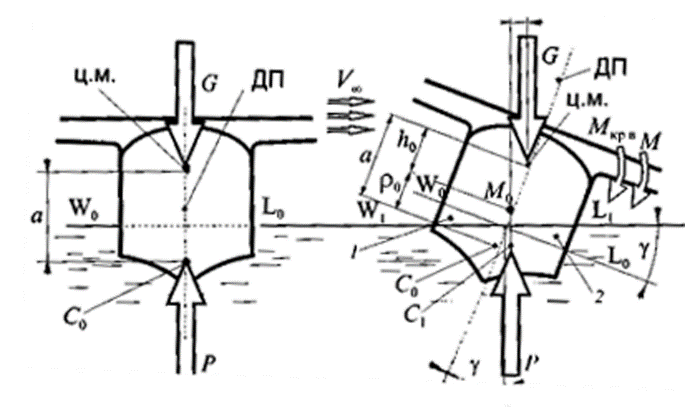
Рис. 9.3. Неостойчивая лодка
От боковой составляющей порыва ветра VB (рис.9.3,6) возникнет кренящий момент МКрВ, зависящий от скоростного напора, площади и размаха
наветренной (обращенной в ту сторону, откуда дует ветер) консоли крыла, площади боковой проекции гидросамолета. Под действием этого момента самолет накренится на некоторый малый (будем считать — бесконечно малый) угол у и новое положение лодки определит новую грузовую ватерлинию W1L1, плоскость которой наклонена на угол у от исходной ватерлинии WoLo.
Форма подводной (водоизмещающей) части лодки изменится: объем, ограниченный в каждом поперечном сечении лодки фигурой 1, выйдет из-под воды,
а равный ему объем, ограниченный в каждом поперечном сечении лодки фигурой 2, уйдет под воду.
Таким образом, величина поддерживающей силы не изменится (Р = W в g = G), однако центр величины сместится из исходного положения С0 в точку С1. Точка Мо пересечения двух смежных линий действия архимедовых сил при бесконечно малом угле у между ними и является начальным метацентром.
Метацентрический радиус r0 определяет начальную кривизну линии смещения центра величины лодки при крене.
Мерой поперечной остойчивости гидросамолета является значение метацентрической высоты
h0 = r0 -a,
· если h 0> 0 — лодка остойчива;
· если h 0= 0 — равновесие безразличное;
· если h0 < 0 — лодка неостойчива.
·
В рассмотренном примере h0< 0.
Нетрудно видеть, что перпендикулярные к поверхности воды и равные силы Р и G будут составлять пару с плечом l, причем момент этой пары МКрG= Gl совпадает по направлению с возмущающим моментом МКр в и увеличивает угол крена.
Таким образом, гидросамолет, показанный на рис. 9.3,6, при действии внешних возмущений не возвращается к исходному положению, т. е. не обладает поперечной остойчивостью.
Очевидно, что для обеспечения поперечной остойчивости центр масс должен находиться ниже самого низкого положения метацентра.
 Большинство современных гидросамолетов выполнено по классической аэродинамической схеме
Большинство современных гидросамолетов выполнено по классической аэродинамической схеме
с фюзеляжем — лодкой, которой придаются соответствующие формы для выполнения взлета с воды
и посадки на воду, высокорасположенным крылом
с установленными на нем или на лодке двигателями для максимального удаления их от водной поверхности с целью исключить при движении по воде заливание крыла водой и попадание ее в двигатели и на
винты самолетов с винтомоторной силовой установкой, поэтому в большинстве случаев центр масс самолета выше метацентра (как на рис. 9.3,6) и однолодочный гидросамолет в поперечном отношении неостойчив.
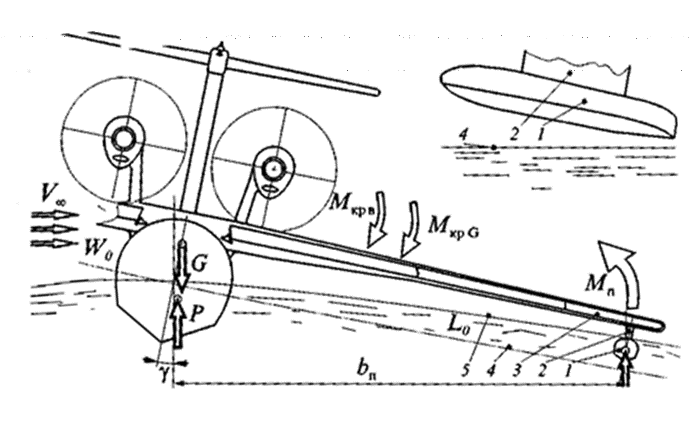
Рис. 9.4. Подкрыльный поплавок
Проблемы поперечной остойчивости гидросамолета однопоплавковой или однолодочной схемы могут быть решены применением подкрыльных поплавков (рис. 9.4).
| Pn |
Водоизмещение поплавка выбирается таким образом, чтобы под воздействием ветра с определенной скоростью Vв гидросамолет, находящийся на скате волны 5, соответствующей предельному волнению акватории, заданному в ТЗ на проектирование, накренился на определенный угол  .
.
В этом случае восстанавливающий момент поплавка, определяемый поддерживающей силой поплавка Рп и расстоянием bп от диаметральной плоскости поплавка до диаметральной плоскости лодки,
Мп = Рп bп должен парировать (уравновесить) кренящие моменты МKpВ от ветра и Мкр  от неостойчивой лодки W1L1.
от неостойчивой лодки W1L1.
Продольная остойчивость определяется такими же условиями, как и поперечная. Если под действием какого-либо внешнего возмущения гидросамолет (рис.9.5) получит продольное наклонение от исход ного положения, определяемого ватерлинией WoLo, например увеличение на угол Δ  дифферента на нос, это определит новую грузовую ватерлинию.Объем лодки 1 выйдет из-под воды, а равный ему объем
дифферента на нос, это определит новую грузовую ватерлинию.Объем лодки 1 выйдет из-под воды, а равный ему объем
2 уйдет под воду, при этом значение поддерживающей силы не изменится (Р = W  g = G), однако центр величины сместится из исходного положения С0 в
g = G), однако центр величины сместится из исходного положения С0 в 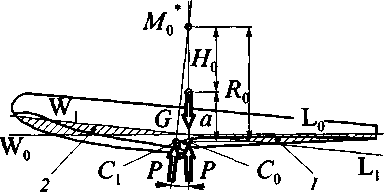 точку С1. Точка M0 пересечения двух смежных линий действия поддерживающих сил при бесконечно малом угле между ними определит
точку С1. Точка M0 пересечения двух смежных линий действия поддерживающих сил при бесконечно малом угле между ними определит
| Рис. 9.5. К объяснению продольной остойчивости |
Мера продольной остойчивости гидросамолета – продольная метацентрическая высота Н0 = R0 - a.
Обеспечить продольную остойчивость гидросамолета проще, чем поперечную, в том смысле, что сильно развитая в длину лодка почти всегда обладает естественной продольной остойчивостью (Н0 > 0).
Отметим, что пикирующий момент от силы тяги двигателя, линия действия которой обычно проходит выше центра масс самолета, заглубляет носовую часть лодки, уменьшает угол начального дифферента, т. е. заставляет лодку принять некоторый дифферент на нос, что определит новую грузовую ватерлинию, которая называется «упорной».
Гидростатические силы (силы поддержания), обеспечивающие плавучесть и остойчивость лодки в состоянии покоя, естественно, в большей или меньшей мере проявляются и в процессе движения по воде.
Весьма важной характеристикой гидросамолета, определяющей его мореходность, является способность преодолевать сопротивление воды и развивать необходимую скорость движения по воде при минимальных затратах мощности.
Гидродинамическая сила сопротивления воды движению лодки в режиме плавания определяется трением воды в пограничном слое (сопротивление трения)
и распределением гидродинамического давления потока воды на лодку (сопротивление формы, связанное с образованием вихревых течений — его иногда называют водоворотным сопротивлением) и зависит от скорости движения (скоростного напора 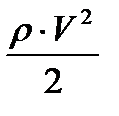 ), формы и состояния поверхности лодки.
), формы и состояния поверхности лодки.
Здесь уместно напомнить, что плотность воды  больше плотности воздуха на уровне моря примерно
больше плотности воздуха на уровне моря примерно
в 800 раз!
К этому сопротивлению добавляется волновое
сопротивление, которое, в отличие от волнового сопротивления, связанного с необратимыми потерями энергии в скачке уплотнения при полете с закритическими скоростями, возникает при движении тела вблизи свободной поверхности жидкости (поверхности раздела воды и воздуха).
Волновое сопротивление — часть гидродинамического сопротивления, характеризующая затрату энергии на образование волн.
Волновое сопротивление в воде (тяжелой жидкости) возникает при движении погруженного или
полупогруженного тела (поплавка, лодки) вблизи свободной поверхности жидкости (т. е. границы воды
и воздуха). Движущееся тело оказывает добавочное давление на свободную поверхность жидкости, которая под влиянием собственной силы тяжести будет стремиться вернуться к исходному положению и придет в колебательное (волновое) движение. Носовая
и кормовая части лодки образуют взаимодействующие между собой системы волн, оказывающие существенное влияние на сопротивление.
В режиме плавания равнодействующая сил гидродинамического сопротивления практически горизонтальна.
Форма водоизмещающей части гидросамолета (как и форма судна) должна обеспечить способность движения по воде с минимальным сопротивлением и, как следствие, с минимальными затратами мощности (ходкость судна, по морской терминологии).
При проектировании гидросамолетов (как и судов) для выбора форм и оценки гидродинамических характеристик используются результаты испытаний путем буксировки («протаски») динамически подобных моделей в опытовых бассейнах {гидроканалах) или в открытых акваториях.
Однако, в отличие от судна, комплекс характеристик мореходности гидросамолета значительно шире, основной из них является способность производить безопасные взлеты и посадки на взволнованной поверхности с определенной высотой волны, при этом скорости хода по воде гидросамолетов во много раз превышают скорости морских судов.
Благодаря особой форме днища лодки гидросамолета возникают гидродинамические силы, поднимающие носовую часть и вызывающие общее значительное всплытие лодки.
| Рис.9.6. Лодка гидросамолета: 1 – нос лодки, 2 – днище, 3 – борт, 4 – скула, 5 – киль, 6 – первый редан, 7 – межреданная часть, 8 – второй редан, 9 – корма. |
к скорости отрыва при взлете, водоизмещение практически равно нулю — гидросамолет идет в режиме глиссирования (от франц. glisser — скользить) — скольжения по поверхности воды. Характерная особенность режима глиссирования заключается
в том, что равнодействующая сил гидродинамического сопротивления воды имеет настолько большую вертикальную составляющую (гидродинамическую силу поддержания), что лодка большей частью своего водоизмещающего объема выходит из воды и скользит по ее поверхности. Поэтому обводы (очертания наружной поверхности) лодки гидросамолета (рис. 9.6) существенно отличаются от обводов судна.
Основное отличие состоит в том, что днище (нижняя поверхность лодки, которая, является основной опорной поверхностью при движении гидросамолета по воде) имеет один или несколько реданов (франц. redan — уступ), первый из которых, как правило, располагается вблизи центра масс гидросамолета, а второй в кормовой части. Прямые в плане реданы (рис. 9.6,a) создают в полете значительно большее сопротивление, чем заостренные (стреловидные, оживальные) реданы (рис. 9.6,6), гидродинамическое сопротивление и брызгообразование которых существенно меньше. Со временем ширина второго редана постепенно уменьшалась, меж-реданная часть днища стала сходиться в  одной точке (рис. 9.6,в) на корме лодки.
одной точке (рис. 9.6,в) на корме лодки.
В процессе развития гидроавиации изменялась
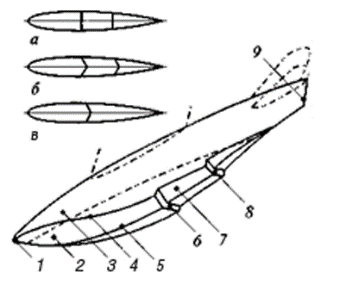
и форма поперечного сечения лодки (рис. 9.7).
Лодки с плоским днищем (рис 9.7, а) и с продольными реданами
| Рис 9.7. Формы поперечного сечения лодки |
(т. е. с небольшим наклоном участков днища от центральной килевой линии к бортам — рис. 9.7,е)
и с вогнутым днищем (рис. 9. 7, г) постепенно уступали место килеватым лодкам с плоскокилеватым днищем (рис. 9.7, д) или с более сложным (в частности, криволинейным) профилем килеватости (рис. 9.7, е).
Здесь следует отметить, что гидросамолеты не имеют амортизаторов, способных поглощать
и рассеивать энергию ударов при посадке на воду. Поскольку вода — практически несжимаемая жидкость, то сила удара о воду соизмерима с силой удара о землю. Основное назначение килеватости — заменить собой амортизатор и при постепенном погружении в воду клиновой (килеватой) поверхности при посадке смягчить посадочный удар, а также удары воды о днище лодки при движении на взволнованной поверхности воды.
Характерные обводы лодки современного гидросамолета представлены на рис. 9.8. Лодка имеет поперечную и продольную килеватость днища.
Поперечная килеватость лодки (или угол, образуемый килем и скулами) выбирается, исходя из условий обеспечения приемлемых перегрузок на взлетно-посадочных режимах и обеспечения динамической путевой остойчивости. Угол поперечной килеватости носовой части лодки, начиная от первого редана βрн, плавно увеличивается к носу лодки (на виде спереди А-А - наложенные сечения по носовой части лодки) таким образом, что формируется волнорез в носовой части лодки, «разваливающий» встречную волну и уменьшающий волно- и брызгообразование.
Скула (линия пересечения днища и борта лодки) препятствует прилипанию воды к бортам. Для создания приемлемого волно- и брызгообразования
применяют выгиб носовых скул, т. е. профилировку днища носовой части лодки по сложным криволинейным поверхностям
| Рис. 9.8. Характерные обводы лодки гидросамолета: 1 — нос лодки; 2 — борт; 3 — палуба; 4 — корма; 5 — днище носовой части; 6 — киль; 7 — скула носовой части; 8 — первый редан; 9 — скула зареданной части; 10 — межреданнаячасть днища; 11 — второй редан |
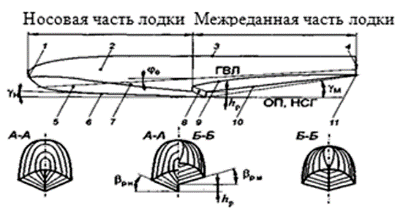 Днище межреданной части лодки (на виде сзади Б-Б — наложенные сечения по кормовой части
Днище межреданной части лодки (на виде сзади Б-Б — наложенные сечения по кормовой части лодки) обычно плоскокилеватое — значение угла βрм
постоянно. Углы поперечной килеватости на редане обычно порядка 15-30°.
Продольная килеватость лодки υлопределяется
углом продольной килеватости носовой части  н и углом продольной килеватости межреданной части
н и углом продольной килеватости межреданной части  м.
м.
Длина, форма и продольная килеватость носовой части ( н = 0…+3°), влияющие на продольную остойчивость и угол начального дифферента, выбираются такими, чтобы исключить зарывание носом и заливание палубы водой при высоких скоростях хода.
Продольная килеватость межреданной части (γм = 6…9°) выбирается так, чтобы обеспечить устойчивое глиссирование, посадку на сушу при максимально допустимом угле атаки и сход на воду (для самолета-амфибии) по существующим слипам (англ. slip, букв. — скольжение) — уходящим в воду наклонным
береговым площадкам для схода амфибии на воду
и выхода на берег.
При достаточной продольной килеватости межреданной части отрыв при взлете с воды может происходить «с подрывом» (увеличением угла атаки) на максимально допустимом коэффициенте подъемной силы Суаmax.
Отрыв с воды при взлете осложнен тем, что, кроме сил сопротивления воды движению лодки, рассмотренных выше, между днищем лодки и водой действуют силы сцепления (подсасывания), особенно в задней части лодки.
Назначение редана — уничтожить подсасывающее действие воды (подсос) при разбеге, уменьшить этим сопротивление воды, дать возможность лодке «отлипнуть» от воды.
Редан, нарушая плавность обводов лодки, естественно, способствует вихреобразованию, при увеличении скорости хода по воде интенсивность вихреобразования возрастает, начинается срыв водяных струй
с редана и, как следствие, кавитация (от лат. cavitas — пустота) — нарушение сплошности внутри жидкости с образованием полостей, заполненных воздухом (кавитационных пузырьков). Эта воздушная прослойка способствует отрыву воды от зареданного участка днища, что приводит к общему значительному всплытию лодки — начинается режим глиссирования (гидропланирования), или режим бега на редане, наиболее выгодный по величине гидродинамического сопротивления.
Перед выходом на режим глиссирования за счет взаимодействия носовой и кормовой волн, создаваемых
лодкой на поверхности воды, происходит увеличение дифферента на корму, изменяется картина обтекания, днище начинает испытывать большие
нормальные давления, увеличивается и отклоняется от начального горизонтального положения равнодействующая сил гидродинамического сопротивления — появляется вертикальная составляющая (гидродинамическая сила поддержания), которая выталкивает лодку из воды, что уменьшает смоченную поверхность днища и бортов.
Таким образом, гидросамолет при взлете должен выходить на редан, сохранять достаточную продольную устойчивость при глиссировании и легко отрываться от воды.
В режиме глиссирования (рис. 9.9) гидросамолет движется на относительно малой контактной (смоченной) поверхности 1 с водой на треугольнике в районе первого редана, резко уменьшается горизонтальная составляющая Хaгид равнодействующей сил гидродинамического сопротивления RAгид и возрастает скорость хода.
Второй редан (корма лодки) улучшает продольную устойчивость при беге на первом редане.
Сила тяжести самолета G уравновешивается частично гидродинамической силой поддержания Ргид. контактной поверхности днища, а частично подъемной силой самолета Уaсам = Уaкр – Уaг.о.
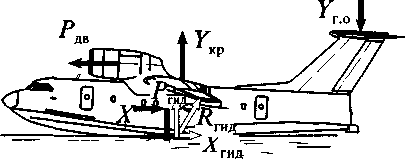
| Рис. 9.9. Гидросамолет в режиме глиссирования |
Характер изменения основных параметров движения гидросамолета при взлете в зависимости от относительной скорости разбега  (здесь
(здесь  — скорость отрыва гидросамолета от воды) проиллюстрирован рис. 9.10.
— скорость отрыва гидросамолета от воды) проиллюстрирован рис. 9.10.
В режиме плавания при скоростях V = (0-0,25) сила тяжести гидросамолета практически полностью уравновешивается силой гидростатического поддержания, значение аэродинамической подъемной силы
в общем балансе сил невелико.
Сила гидродинамического сопротивления определяется в основном сопротивлением поверхностного трения ХaТ и волнообразования Хaв (за счет резких уступов на водоизмещающей части лодки — скул и редана). Примерно в середине режима начинает увеличиваться угол дифферента φ, появляется срыв струй воды с редана, возникает в есьма незначительная гидродинамическая сила поддержания и соответствующая ей сила сопротивления глиссирования Хaгл.
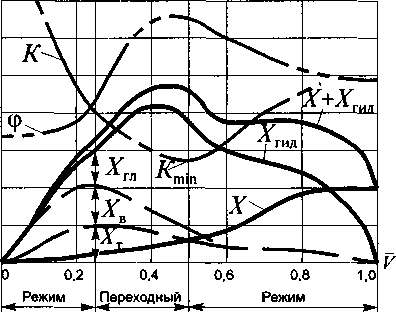
Рис. 9.10. Зависимость параметров движения гидросамолета
при взлете от относительной скорости разбега
На переходном режиме при скоростях V = (0…0,25) интенсивно растет угол дифферента, сила гидростатического поддержания и соответствующая ей сила сопротивления глиссирования Хa гл. Лодка резко всплывает, борта выходят из воды, соответственно уменьшается сопротивление поверхностного трения Хa т и волнообразования Хa в, тем не менее на этом режиме сила гидродинамического сопротивления Хгид достигает максимального значения («горб» на кривой гидродинамического сопротивления). Значение аэродинамических сил в общем балансе сил относительно невелико.
На режиме глиссирования при скоростях V = (0,50…1,00) угол дифферента постепенно уменьшается, соответственно уменьшается сила гидростатического поддержания и сила сопротивления глиссирования, поскольку с ростом скорости движения на редане возрастает аэродинамическая подъемная сила, полностью уравновешивающая силу тяжести гидросамолета на скорости отрыва.
Отметим еще раз, что для обеспечения взлета гидросамолета сила тяги двигателей должна быть больше максимального значения суммы сил аэродинамического и гидродинамического сопротивления (в районе «горба» на кривой гидродинамического сопротивления).
Характер изменения основных параметров движения гидросамолета при посадке (точнее — при послепосадочном пробеге, от момента касания реданом
воды на посадочной скорости  до полной остановки) в зависимости от относительной скорости пробега
до полной остановки) в зависимости от относительной скорости пробега
V = V/Vnoc является, по существу, зеркальным отражением рис. 9.10.
Здесь следует отметить только, что значения гидродинамического сопротивления при пробеге будут отличаться от значений при посадке вследствие того, что нагрузка на воду будет меньше (посадка совершается самолетом с массой меньшей, чем взлетная)
и практически отсутствует при изменении угла дифферента вертикальная составляющая силы тяги двигателей, поскольку пробег совершается с двигателями, работающими на режиме «малого газа», т. е. при незначительной силе тяги.
Гидродинамическое совершенство гидросамолета характеризуется минимальным значением гидродинамического качества
К= А/Хa гид,
где А — нагрузка на воду, или сила тяжести гидросамолета, передающаяся на воду при любой определенной скорости, равная разности между полной
силой тяжести и подъемной силой самолета в данный
момент: А = G — Ya сам; Xa гид — гидродинамическое сопротивление самолета в данный момент.
Значение Кmin составляет 4,5…6,0 для лодок
и 3,5…4,5 для поплавков.
Безопасность при взлете и посадке обеспечивается, если: гидросамолет не зарывается носом при движении, особенно на взволнованной поверхности; плавно выходит на глиссирование; обладает остойчивостью
и устойчивостью по всем трем осям в режиме плавания и глиссирования, т. е. не имеет тенденции
к самопроизвольной продольной раскачке с возрастающей амплитудой, к самопроизвольному рысканию и крену.
Режим глиссирования является наиболее сложным
с точки зрения продольной устойчивости движения. При глиссировании межреданная часть днища заливается брызговой струей от первого редана. Пульсации давления в струе могут вызвать самопроизвольные угловые и вертикальные колебания лодки даже при совершенно гладкой поверхности воды. Устойчивое глиссирование возможно при определенных сочетаниях угла дифферента и скорости движения для
заданной формы поверхности глиссирования. Устойчивость глиссирования обеспечивается выбором
рациональных обводов лодки и отрабатывается на динамически подобных моделях.
Кроме того, гидросамолет должен обеспечивать весьма специфические требования к устойчивости: устойчиво двигаться на буксире в ветреную погоду
и разворачиваться носом против ветра («приводиться к ветру») при дрейфе (от голл. drijven — плавать, гнать) — смещении с заданного курса при неработающем двигателе под воздействием ветра и волн.
Управляемость — способность выполнять развороты на плаву при наличии ветра. Управляемость гидросамолета по курсу на режиме плавания обычно
обеспечивается водяным рулем (водорулем, гидрорулем), устанавливаемым, как правило, в корме лодки (второй редан), или с помощью разнотяговости двигателей (для двухдвигательного самолета) — разного изменения тяги двигателей правого и левого борта.
На режиме глиссирования уже возможно управлять гидросамолетом по курсу и углу дифферента с помощью аэродинамических рулей.
Приемлемое брызгообразование (чистота бега), при котором можно защитить от попадания воды воздухозаборники двигателей, воздушные винты, закрылки
и другие жизненно важные агрегаты, — одна из важнейших характеристик, определяющих мореходность гидросамолета.
Как уже отмечалось, движущаяся лодка оказывает добавочное давление на свободную поверхность воды. Пиковое (ударное) давление в области контакта передних точек лодки с водой выбивает с поверхности капли воды, разлетающиеся от удара в виде брызговых струй. Интенсивное брызгообразование может происходить уже на малых скоростях хода, особенно на взволнованной поверхности воды.
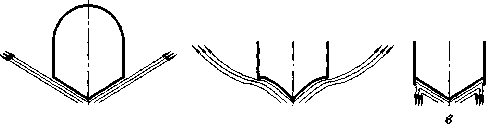 Форма поперечного сечения лодки существенно влияет на характер брызгообразования. При плоскокилеватом днище (рис.9.11, а) брызговые струи
Форма поперечного сечения лодки существенно влияет на характер брызгообразования. При плоскокилеватом днище (рис.9.11, а) брызговые струи
поднимаются на большую высоту, днища с более сложным (в частности, криволинейным) профилем килеватости (рис. 9.11, 6) также не всегда позволяют уменьшить брызгообразование.
Рис. 9.11. Форма днища и характер брызгообразования
 Эффективным средством уменьшения брызгообразования являются брызгоотражатели — брызгоотражающие щитки (рис. 9.11, в), установленные
Эффективным средством уменьшения брызгообразования являются брызгоотражатели — брызгоотражающие щитки (рис. 9.11, в), установленные
в плоскости борта.
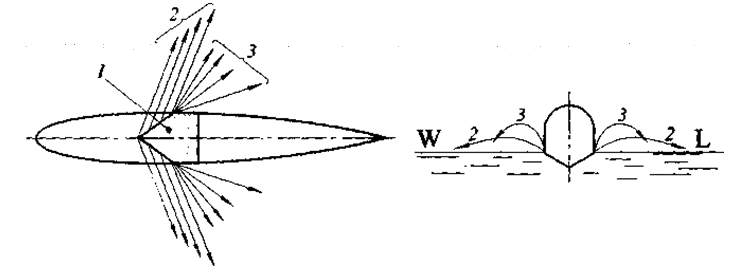
Рис.9.12. Брызгообразование при глиссировании
На режиме глиссирования (рис. 9.12) от передней линии контактной площадки 1 разворачиваются брызговые струи сложной пространственной формы.
Относительно слабые прямолинейные струи 2 («ленточные» или скоростные струи) стелются под малым углом к поверхности воды. Мощные и тяжелые купольные, или блистерные (от англ. blister — пузырь), струи 3 выбрасываются вверх и назад. Высота подъема этих струй определит положение крыла, двигателей и оперения гидросамолета.
Непотопляемость как одна из характеристик мореходности означает, что гидросамолет сохраняет плавучесть и остойчивость при частичном повреждении
и затоплении подводной части лодки или поплавков. Для того, чтобы обеспечить соответствующий запас плавучести при повреждениях, объем водонепроницаемой части лодки (поплавка) делают в 1,2…3,5 раза больше, чем потребный объем, соответствующий взлетной массе гидросамолета.
Подводную часть лодки разделяют водонепроницаемыми (герметичными) перегородками на отсеки таким образом, чтобы даже затопление двух соседних отсеков не приводило к потере продольной остойчивости или к появлению недопустимых углов дифферента и крена, затрудняющих буксировку аварийного гидросамолета, и тем более к затоплению лодки.
Чтобы повреждение или отрыв подкрыльного поплавка не привели к потере поперечной остойчивости и опрокидыванию гидросамолета, концевые части крыла выполняют в виде водонепроницаемых (водоизмещающих) отсеков.
Таким образом, обеспечение мореходности влияет на аэродинамическую компоновку, точнее аэрогидродинамическую компоновку — настолько сильно требования мореходности сказываются на выборе формы, размеров и взаимного расположения основных агрегатов гидросамолета.
В процессе развития гидроавиации только в нашей стране было создано около 100 летательных аппаратов, способных использовать в качестве аэродрома водную поверхность.
Назовем еще одно транспортное средство, которое с полным правом можно рассматривать как летательный аппарат.
Экраноплан — крылатый летательный аппарат, совершающий крейсерский полет в непосредственной близости от поверхности экрана (земли или воды).
В авиации с проявлением влияния экрана на самолет встретились в 1920-х годах: при взлете и посадке
в непосредственной близости от земли вопреки всем законам классической аэродинамики возникала дополнительная подъемная сила, что резко увеличивало длину посадочной дистанции. Для устранения этого эффекта при посадке применяются интерцепторы
(см. рис. 2.26), которые в таком качестве чаще называют спойлерами (от англ. spoil — портить).
Экранный эффект — увеличение аэродинамической подъемной силы и уменьшение силы лобового сопротивления крыла, движущегося над экраном. Прирост подъемной силы крыла вблизи экрана вызывается повышением давления на его нижней поверхности (динамическая воздушная подушка), а снижение сопротивления обусловлено уменьшением индуктивных скосов потока за счет экрана. В полной мере экранный эффект проявляется на высоте от земли или воды, равной примерно 0,1…0,2 значения САХ крыла, хотя влияние экрана сказывается до высоты полета порядка 1,0 значения САХ крыла.
Аэродинамическое качество крыла вблизи экрана достигает значений (К=30…40), существенно превышающих те, которые достигнуты на крыле современных самолетов (К=18…20). Однако аэродинамическое качество аппарата в целом существенно ниже за счет сопротивления ненесущих частей и потерь качества на балансировку. Для построенных экранопланов
К= 13…16.
В настоящее время известно более 70 реализованных проектов экранопланов и экранолетов — летательных аппаратов, движущихся как над опорной поверхностью на высотах, на которых реализуется
экранный эффект, так и вдали от экрана (самолетный режим). Основную их массу составляют небольшие экспериментальные аппараты.
Большой вклад в популяризацию идеи экраноплана, разработку схемных решений и проведение экспериментальных исследований моделей в аэродинамических трубах внес в 1970-х годах известный авиаконструктор Р.Л. Бартини, работавший совместно с ОКБ
Дата добавления: 2016-12-27; просмотров: 5318;
Поиск по сайту
Узнать еще
- Биологические свойства пар «цитокин — клетка–мишень» 1 глава
- Биологические свойства пар «цитокин — клетка–мишень» 2 глава
- Биологические свойства пар «цитокин — клетка–мишень» 3 глава
- Биологические свойства пар «цитокин — клетка–мишень» 4 глава
- Биологические свойства пар «цитокин — клетка–мишень» 5 глава
- Биологические свойства пар «цитокин — клетка–мишень» 6 глава
- Биологические свойства пар «цитокин — клетка–мишень» 7 глава
- В. В хирургическом блоке (в операционной) 1 глава

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
