Тяга и мощность горизонтального полета
Тяга, необходимая самолёту для выполнения установившегося горизонтального полёта. называется потребной. Она численно равна лобовому сопротивлению самолета:
Рпотр= Х 
Для вывода формулы потребной тяги разделим уравнение 1на уравнение 2 (см. условия г.п.):
 ;
;  ,
,
где K— аэродинамическое качество самолета. Тогда
Pпотр = 
Потребная тяга зависит от аэродинамического качества, которое можно изменить, меняя угол атаки.
Тяга , потребная для установившегося горизонтального полёта, будет минимальной при полёте с углом атаки αнв, на котором аэродинамическое качество К максимально.
Pпотрmin = 
При расчёте лётных характеристик самолётов
с турбовинтовыми двигателями (ТВД) пользуются понятием потребной мощности.
Nпотр = РпотрVгп
Потребные тяги определяются расчётным путём
в зависимости от высоты и скорости полёта.
Для построения Рпотр (V) надо знать:
· взлетную массу самолета m  ;
;
· площадь крыла S;
· иметь сетку поляр для различных М;
· сетку высот полета, для которых строят кривые.
Расчет производится для каждой из заданных высот следующим образом:
1. Задается ряд значений М, для которых имеются поляры.
2. Определяются скорости V , соответствующие заданным М, по формуле V = M 
 , где значение скорости звука берется из таблиц СА.
, где значение скорости звука берется из таблиц СА.
3. Рассчитываются значения коэффициента подъемной силы СY  для каждой скорости V по формуле:
для каждой скорости V по формуле:
4. По полярам для соответствующих М (или V) и Сya определяют коэффициент лобового сопротивления Схa.
5. Определяют аэродинамическое качество K по формуле: К=  .
.
6. Производят расчет потребной тяги для каждого из заданных чисел М:
Рпотр=  .
.
Характер протекания кривых Рпотр (V) зависит от аэродинамической компоновки самолета.
| Рис. 4.2. Графики потребной тяги и потребной мощности: а) тяги; б) мощности. Сплошная линия — дозвуковые самолеты; пунктирная – сверхзвуковые. |
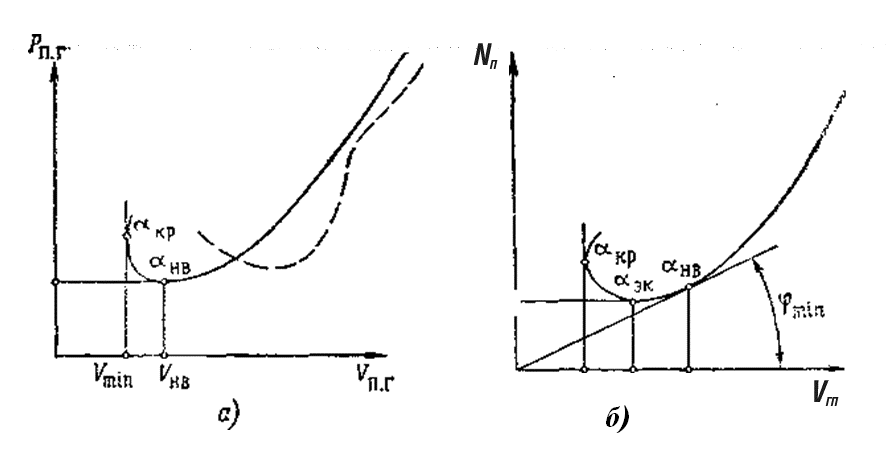
Характерные точки графиков:
Vmin – минимальная скорость гп, соответствующая полету самолета на угле атаки  ;
;
Vнв – скорость гп, соответствующая Рпотр min;
Vкрейс — крейсерская скорость полета, на которой совершается полет на максимальную дальность;
Vэк – скорость гп, соответствующая минимальной потребной мощности Nпотр min.
Совмещенный график
потребной и располагаемой тяг
При аэродинамическом расчете самолета для определения основных летно-тактических характеристик самолетов пользуются совмещенным графиком потребной и располагаемой тяг или мощностей в зависимости от скорости полета V.
Располагаемой называется наибольшая тяга, которую может развить силовая установка самолёта на данных высоте H и скорости V полета при максимально допустимом режиме работы двигателя.
На анализе кривых потребной и располагаемой тяг Н.Е.Жуковский построил аэродинамический расчет самолета по методу тяг. Поэтому эти кривые называются кривыми Жуковского.
Метод тяг, основанный на сопоставлении силы тяги, потребной для прямолинейного установившегося движения на некотором угле атаки, и силе тяги, развиваемой силовой установкой, был предложен Жуковским в 1900 г.
| Рис. 4.3.Совмещенный график потребной и располагаемой тяг (а) и мощностей (б) |
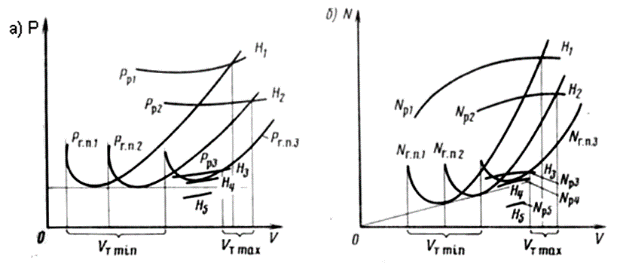
Кривая потребной тяги показывает, какая сила тяги необходима самолету для выполнения горизонтального полета на данной высоте с той или иной скоростью полета, а располагаемая тяга показывает, какую силу тяги должна создавать силовая установка на данной высоте при той или иной скорости полета.
Точки, лежащие на кривой потребных тяг, соответствуют различным режимам полета самолета.
Их можно осуществить, меняя потребную или располагаемую тягу так, чтобы Рпотр = Ррасп.
Точкам пересечения кривых потребной и располагаемой тяг соответствует равенство Рпотр=Ррасп, что соответствует горизонтальному полету самолета.
Если при выполнении горизонтального полета на некоторой скорости равновесие сил нарушится
и Ррасп станет больше Рпотр, то самолет на данной скорости и данном угле атаки начнет набирать высоту. Если же удерживать самолет от набора высоты уменьшением угла атаки, то он начнет увеличивать скорость полета. При увеличении скорости Рпотр возрастает согласно графику Рпотр(V) . Разогнавшись до скорости, на которой потребная тяга станет равной тяге располагаемой, самолет окажется в режиме установившегося горизонтального полета.
Если при некоторой скорости полета Ррасп<Рпотр, то такое нарушение равновесия приведет к снижению самолета. Увеличением угла атаки можно удержать самолет от снижения и сохранить режим горизонтального полета на данной высоте, но с меньшей скоростью.
Режиму полета на Vmax г.п. соответствует точка пересечения кривых Рпотр и Ррасп при полностью открытой дроссельной заслонке двигателя (т.е. при максимально возможной тяге). Уменьшая Ррасп и увеличивая отклонением руля высоты угол атаки  , можно перейти на режим V < Vmax.
, можно перейти на режим V < Vmax.
Режиму полета самолета на Vmin соответствует точка касания вертикальной касательной к кривой Рпотр. Левее этой линии установившейся полет невозможен.
По совмещенному графику можно построить график зависимости скоростей горизонтального полета в зависимости от высоты V(Н). С увеличением Н Vmin увеличивается из-за уменьшения плотности  и на больших высотах Н может оказаться сверхзвуковой. Vmax до Н = 11 км увеличивается, а затем уменьшается, т.к. располагаемая тяга Ррасп начинает уменьшаться интенсивнее, чем плотность.
и на больших высотах Н может оказаться сверхзвуковой. Vmax до Н = 11 км увеличивается, а затем уменьшается, т.к. располагаемая тяга Ррасп начинает уменьшаться интенсивнее, чем плотность.
На определенной высоте Vmax = Vmin и самолет может лететь только с одной скоростью.
На больших высотах Vmin определяется т. пересечения кривой Ррасп с левой ветвью Рпотр.
Область скоростей V и высот Н, на которых возможно выполнять установившийся горизонтальный полет, ограничена слева Vmin, сверху — линией потолков и справа – линией максимальных или максимально-допустимых скоростей.
Диапазон скоростей
и высот горизонтального полета
Область значений скоростей от минимальной теоретической Vт min до максимальной Vmax и область высот полета от Н=0 до теоретического потолка Нт, при которых в условиях СА возможен полет самолета, имеющего определенную массу, называется теоретическим диапазоном скоростей и высот полета. По сравнению с теоретическим эксплуатационный диапазон скоростей и высот полета ограничивается минимально и максимально допустимыми скоростями
и допустимой высотой полета (рис. 4.4).
Практически полет на скорости Vmin запрещается из условий безопасности, т.к. может привести при случайном увеличении угла атаки к срыву потока с крыла и сваливанию самолета. Поэтому вводится понятие минимально- допустимой скорости, на которой разрешен полет:
где СY  доп – допустимый коэффициент подъемной силы, который определяется во время летных испытаний и соответствует углу атаки
доп – допустимый коэффициент подъемной силы, который определяется во время летных испытаний и соответствует углу атаки  , при полете на котором начинается легкое потряхивание самолета. Минимальную безопасную (минимально-допустимую) скорость, достигнутую в процессе испытаний самолета, называют эволютивной.
, при полете на котором начинается легкое потряхивание самолета. Минимальную безопасную (минимально-допустимую) скорость, достигнутую в процессе испытаний самолета, называют эволютивной.
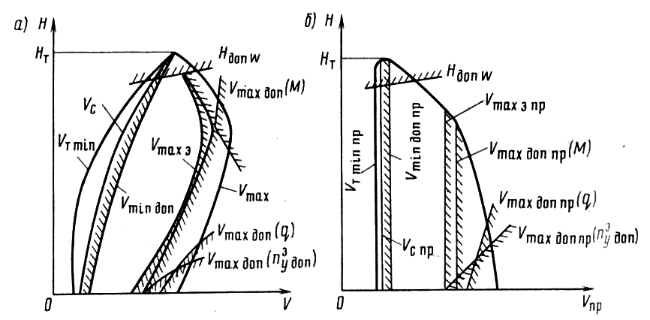
Рис. 4.4.Эксплуатационные ограничения скоростей и высот полета:
а) истинные скорости; б) приборные скорости.
Максимальная скорость горизонтального полета ограничивается из условия прочности конструкции по скоростному напору, нормальной перегрузке и из условия устойчивости и управляемости самолета.
Максимальная скорость полета на малых высотах ограничивается из условий жесткости и прочности конструкции самолета и зависит от величины максимального скоростного напора q  . На больших высотах вступает в силу ограничение по числу М
. На больших высотах вступает в силу ограничение по числу М  для дозвуковых самолетов и Мпред из условий аэродинамического нагрева для сверхзвуковых самолетов.
для дозвуковых самолетов и Мпред из условий аэродинамического нагрева для сверхзвуковых самолетов.
Значительное влияние на диапазон скоростей и высот полета оказывают условия эксплуатации: температура, плотность воздуха (высота полета), ветер, полетная масса, число М полета и т.д.
Высота полета, на которой Vmax = Vmin, называется теоретическим потолком самолета. На этой высоте самолет может совершать горизонтальный полет только с одной определенной скоростью.
Набор высоты
Режимом набора высоты называется установившееся равномерное прямолинейное движение самолета вверх по траектории, наклонной к горизонту.
В наборе высоты так же, как в горизонтальном полете, силы, действующие на самолет, условно приложены в центре масс.
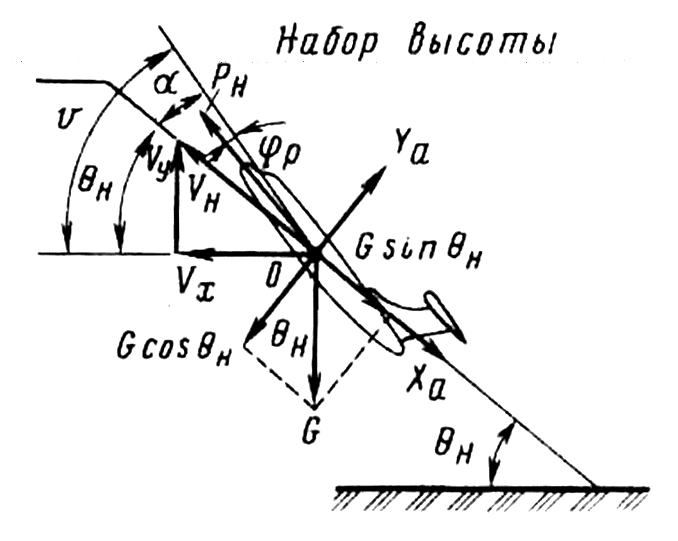
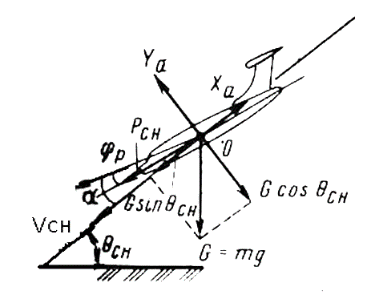
Рис. 4.5. Схема сил, действующих на самолет при подъеме
Равномерное прямолинейное движение возможно только при равновесии сил, действующих на самолет. Поэтому условия установившегося набора высоты имеют следующий вид:
Y =mg cos  — условие прямолинейности полёта.(1)
— условие прямолинейности полёта.(1)
P=X +mg sin —условие равномерности полёта. (2)
Y нв < Y гп, так как уравновешивает только часть веса mgcos .
Тяга в наборе высоты больше тяги горизонтального полёта на величину избытка тяги
 .
.
Скорость набора высоты V  выражается формулой:
выражается формулой:
Характеристикой маневренности при наборе высоты является угол наклона траектории . Из формулы  видно, что угол
видно, что угол  зависит от массы самолета и избытка тяги.
зависит от массы самолета и избытка тяги.
sin 
Современные истребители могут производить набор высоты при >50  . Для самолетов ГА углы набора высоты не превышают 6…8
. Для самолетов ГА углы набора высоты не превышают 6…8  .
.
Одной из важнейших лётных характеристик самолёта является вертикальная скорость набора высоты Vy. Численно Vy равна высоте, набранной самолетом за 1сек.
| θнаб |
| Vнаб≈V |
| Vy |
Рис. 4.6.К выводу формулы вертикальной скорости Vy
Из треугольника скоростей Vy=V sin .
Выведем зависимость Vy от избытка тяги ΔP. Для этого все члены уравнения 2 умножим на V:
P=X+ mg sinθ|V
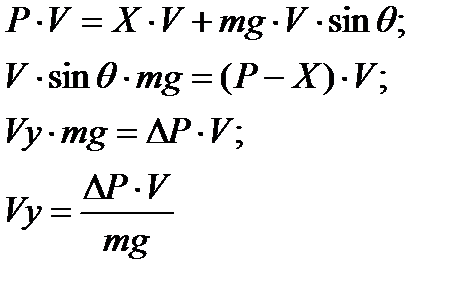
Произведение ΔPV называется избытком мощности (ΔN). Для самолетов с ТВД
При увеличении высоты полета изменяется избыток мощности и поэтому изменяется вертикальная скорость Vy.
Таким образом, вертикальная скорость создается за счет избытка тяги (мощности), который определяет режим движения самолета: в горизонтальном полете  =0, при наборе высоты >0, при снижении
=0, при наборе высоты >0, при снижении  <0.
<0.
Для того, чтобы определить Vymax, необходимо построить вспомогательный график Vy (V), пользуясь совмещенным графиком потребной и располагаемой тяг.
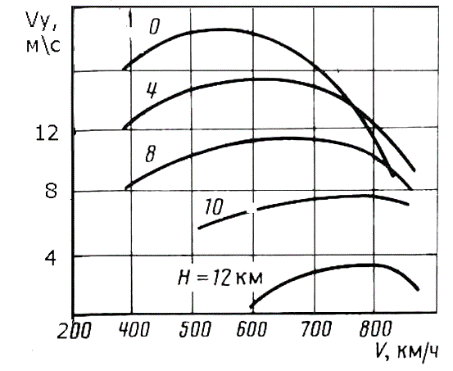
Задаваясь скоростями полета, для каждой скорости из графика Рпотр, Ррасп(V) снимаем значение избытка тяги и по формуле Vy=  определяем значения Vy для каждой из заданных скоростей и высот полета. На основании полученных данных строим графики зависимости Vy(V) для каждой высоты (рис. 4.7).
определяем значения Vy для каждой из заданных скоростей и высот полета. На основании полученных данных строим графики зависимости Vy(V) для каждой высоты (рис. 4.7).
Рис. 4.7. Зависимость располагаемой
вертикальной скорости от скорости набора высоты
Снимая с графика полученные значения Vymax, можно построить график зависимости Vymax(Н) (рис.4.8).
По этому графику определяются «потолки» самолета.
Высота, на которой Vymax=0, называется теоретическим или статическим потолком. Она представляет собой предел, к которому самолет, выполняя режим набора высоты, приближается, но достичь не может,
т. к. вблизи потолка Vy стремится к нулю, следовательно, время набора высоты t стремится к бесконечности (t=  ).
).
Высота, на которой Vymax=0,5 м\с (5м\с для сверхзвуковых самолетов), называется практическим потолком самолета.
Практический потолок современных пассажирских самолетов соответствует высотам Н=8000…13000м,
а время его набора t=20…60мин.
Выше линии теоретического потолка лежит область динамических высот.
Динамическим потолком называется максимальная высота, которую может достичь самолет в неустановившемся управляемом полете за счет израсходования своей кинетической энергии.
Одной из важных характеристик набора высоты является скороподъемность. Это время набора самолетом любой заданной высоты. Определяется скороподъемность методом графического интегрирования графика Vymax (Н). Для этого весь диапазон высот от 0 до Нпр разбивается на прямолинейные участки, для каждого участка определяются величины  Н и Vyср и по формуле
Н и Vyср и по формуле
t=  =
= 
определяется скороподъемность самолета.
Результаты расчета сводятся в таблицу:
| Высота Н. м | |||||
 Н= Hi – Hi-1 Н= Hi – Hi-1
| |||||
| |||||
| t, мин
| |||||
| t=∑ t, мин
|
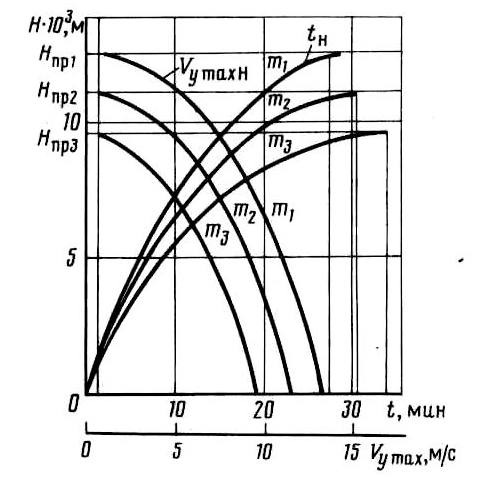 По данным таблицы строится график зависимости времени подъема от высоты, который называется барограммой набора высоты (рис. 4.8.).
По данным таблицы строится график зависимости времени подъема от высоты, который называется барограммой набора высоты (рис. 4.8.).
Рис.4.8. Максимальные вертикальные cкорости и скороподъемность для самолета с различными взлетными массами (m  < m < m  < m < m  ) )
|
Если на этом графике провести горизонтальную линию, соответствующую теоретическому потолку, то можно увидеть, что барограмма набора высоты асимптотически приближается к этой линии, не пересекая ее, т.е. время достижения самолетом теоретического потолка равно бесконечности.
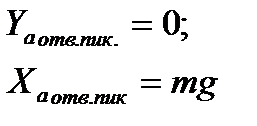
Поляра скоростей режима набора высоты представляет собой кривую, огибающую концы векторов Vнаб. Каждая точка поляры соответствует определенному углу атаки.
Для удобства поляру переносят в прямоугольную систему координат с сеткой углов  (рис.4.9, а).
(рис.4.9, а).
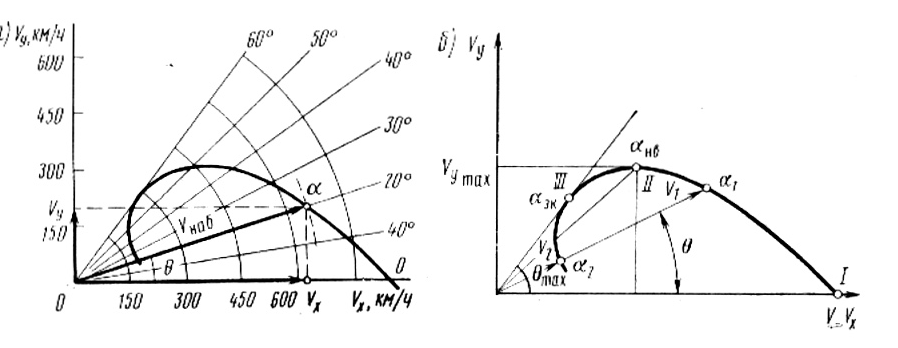
Рис. 4.9.Поляра скоростей при наборе высоты
С помощью поляры скоростей можно по известной скорости Vнаб определить  и , а также скорости Vx и Vy. Для этого из начала координат проводится дуга, радиус которой в масштабе равен Vнаб. Точка пересечения этой дуги с полярой скоростей соответствует углу атаки, на котором производится полет. Проекция вектора скорости Vнаб на ось абсцисс представляет ее горизонтальную составляющую Vx, а проекция на ось ординат – вертикальную скорость набора высоты Vy. Масштаб для Vx и Vy берется одинаковым. Угол определяется графически.
и , а также скорости Vx и Vy. Для этого из начала координат проводится дуга, радиус которой в масштабе равен Vнаб. Точка пересечения этой дуги с полярой скоростей соответствует углу атаки, на котором производится полет. Проекция вектора скорости Vнаб на ось абсцисс представляет ее горизонтальную составляющую Vx, а проекция на ось ординат – вертикальную скорость набора высоты Vy. Масштаб для Vx и Vy берется одинаковым. Угол определяется графически.
На поляре скоростей характерными являются следующие точки (рис. 4.9, б):
1 – точка пересечения поляры с осью абсцисс соответствует горизонтальному полету на скорости Vmax
( =0; Vy=0;  =0);
=0);
2 – точка касания поляры с прямой, параллельной оси абсцисс, соответствует режиму максимальной скороподъемности (Vymax);
3 – точка касания поляры с прямой, проведенной из начала координат, соответствует режиму наиболее крутого подъема (  ).
).
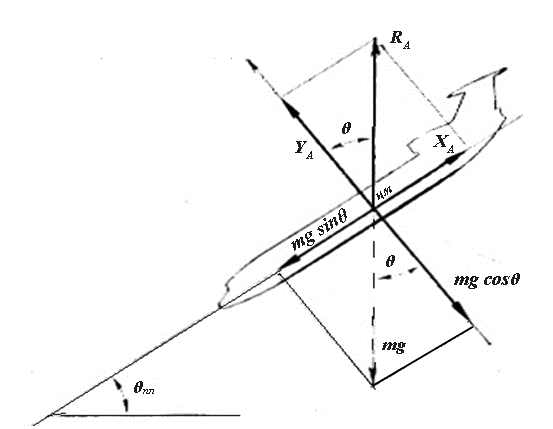
Снижение самолета
Снижение самолета теоретически отличается от набора высоты только тем, что угол наклона траектории будет отрицательным.
| Рис. 4.10. Схема сил, действующих на самолет при снижении |
1.  — условие прямолинейности снижения; 2.
— условие прямолинейности снижения; 2.  — условие равномерности снижения.
— условие равномерности снижения.
При снижении P < X.
При достаточно большой положительной силе тяги снижение самолета называется скоростным. При скоростном снижении перед посадкой обеспечивается возможность ухода самолета на второй круг.
В особых случаях полета, когда безопасность может быть обеспечена только быстрым уменьшением высоты полета, применяется экстренное снижение. Оно выполняется с максимально возможной вертикальной скоростью, которая достигается за счет увеличения угла наклона траектории снижения и скорости полета по траектории.
Планирование

|
| Рис. 4.11. Схема сил при планировании самолета |
Разложив силу тяжести самолета и полную аэродинамическую силу по осям скоростной системы
координат, получим следующие уравнения установившегося планирования:
 ;
;
 ;
;
При планировании роль тяги выполняет составляющая веса G  = mgsin
= mgsin  (рис. 4.11).
(рис. 4.11).
Угол  между траекторией планирования и горизонтом называется углом планирования.
между траекторией планирования и горизонтом называется углом планирования.
Угол планирования равен:

Т.о, угол планирования зависит только от аэродинамического качества K и не зависит от веса самолета mg.
При планировании с углом атаки  , на котором аэродинамическое качество Кmax, снижение будет самым пологим.
, на котором аэродинамическое качество Кmax, снижение будет самым пологим.
tg 
 =
=  .
.
Скорость планирования определяется по формуле:
Vпл=  .
.
Как видно из формулы, чем больше вес самолета mg, тем больше скорость планированя Vпл.
Дальность планирования — это расстояние по
горизонтали, которое самолет пролетает над земной поверхностью при планировании.
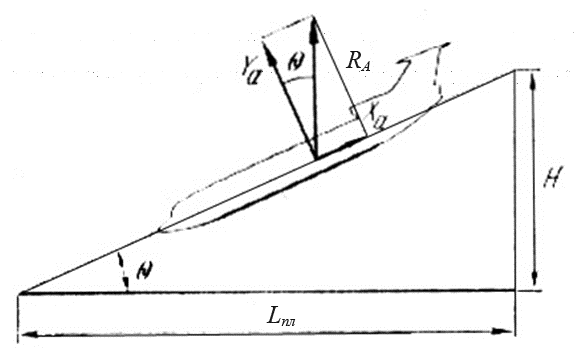
Рис.4.12.Дальность планирования
Дальность планирования Lпл определяется следующим образом:


Максимальная дальность зависит от высоты планирования и соответствует полету с Кmax при планировании на наивыгоднейшем угле атаки.
L  =H
=H 

Крутое планирование с углом более 30  называется пикированием. Оно применяется для быстрой
называется пикированием. Оно применяется для быстрой
потери высоты и разгона самолета.
Пикирование с углом, равным - 900, называется отвесным пикированием. Согласно уравнениям (1) и (2)
Cкорость при отвесном пикировании определится по формуле:
Поляра скоростей при планировании представляет собой кривую, огибающую концы вектора скорости планирования Vпл. Поэтому каждая точка поляры
соответствует определенному углу атаки. Отрезок прямой, соединяющий точку поляры с началом координат, — вектор скорости планирования Vпл. Проекция этого вектора на ось абсцисс – горизонтальная составляющая скорости планирования Vx, а проекция на ось ординат – вертикальную скорость планирования Vy.
Угол между Vпл и осью абсцисс является углом планирования θ.
Поляра строится в одинаковых масштабах для Vx и Vy (рис. 4.13. а).
С помощью поляры скоростей можно по известной скорости планирования Vпл определить угол атаки  , угол наклона траектории
, угол наклона траектории  , скорости Vx и Vy. Для этого из начала координат проводим дугу, радиус которой в масштабе равен Vпл. Точка пересечения дуги
, скорости Vx и Vy. Для этого из начала координат проводим дугу, радиус которой в масштабе равен Vпл. Точка пересечения дуги
с полярой будет соответствовать искомому углу атаки α, а ее проекции на соответствующие оси координат покажут значения Vx и Vy.
Соединив полученную точку с началом координат, определим угол планирования  (угол между соединяющей прямой и осью абсцисс).
(угол между соединяющей прямой и осью абсцисс).
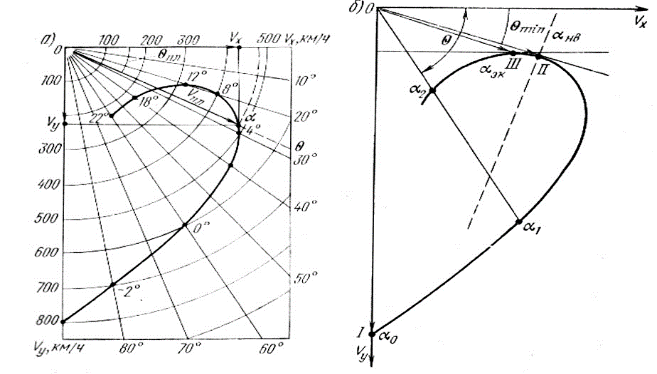
Рис. 4.13. Поляра скоростей при планировании
На поляре скоростей (рис. 4.13. б) характерными являются следующие точки:
1 – точка пересечения поляры с осью ординат соответствует полету на угле атаки  , при котором Су=0, Vx=0, Vymax, = - 90
, при котором Су=0, Vx=0, Vymax, = - 90  , т.е. самолет выполняет отвесное пикирование;
, т.е. самолет выполняет отвесное пикирование;
2 – точка касания поляры с прямой, проведенной из начала координат, соответствует полету на угле атаки  , при котором Кmax, Lпл.max – режим максимальной дальности планирования;
, при котором Кmax, Lпл.max – режим максимальной дальности планирования;
3 – точка касания поляры с прямой, параллельной оси абсцисс, соответствует полету на угле атаки  , при котором Vymin , θпл min, а время планирования t
, при котором Vymin , θпл min, а время планирования t  — режим наибольшей продолжительности планирования.
— режим наибольшей продолжительности планирования.
\
Режимы планирования
Если из начала координат провести прямую, то она пересечет поляру скоростей в двух точках  и
и  (рис.4.14.б). А так как угол между этой прямой и осью абсцисс является углом планирования, то значит, самолет может планировать на угле атаки
(рис.4.14.б). А так как угол между этой прямой и осью абсцисс является углом планирования, то значит, самолет может планировать на угле атаки  или угле атаки
или угле атаки  при одном и том же угле планирования
при одном и том же угле планирования  . Границей двух режимов планирования является угол атаки
. Границей двух режимов планирования является угол атаки  .
.
Первый режим планирования (  , V
, V  >Vнв) – планирование на малых углах атаки с большими скоростями. На этом режиме при случайном увеличении угла атаки угол планирования уменьшается, т.е. планирование становится еще более пологим и безопасным. Это благоприятный режим планирования
>Vнв) – планирование на малых углах атаки с большими скоростями. На этом режиме при случайном увеличении угла атаки угол планирования уменьшается, т.е. планирование становится еще более пологим и безопасным. Это благоприятный режим планирования  .
.
Второй режим (  , V
, V  < Vнв) – планирование на больших углах атаки с малыми скоростями. На этом режиме при случайном увеличении угла атаки угол планирования увеличивается, становится более крутым. Кроме того, самолет может оказаться на углах атаки
< Vнв) – планирование на больших углах атаки с малыми скоростями. На этом режиме при случайном увеличении угла атаки угол планирования увеличивается, становится более крутым. Кроме того, самолет может оказаться на углах атаки  , на которых из-за срывного обтекания крыла коэффициент подъемной силы Су
, на которых из-за срывного обтекания крыла коэффициент подъемной силы Су  резко уменьшается. Подъемная сила становится меньше веса и самолет парашютирует. При парашютировании самолет очень неустойчив, склонен к сваливанию на крыло и переходу в штопор.
резко уменьшается. Подъемная сила становится меньше веса и самолет парашютирует. При парашютировании самолет очень неустойчив, склонен к сваливанию на крыло и переходу в штопор.
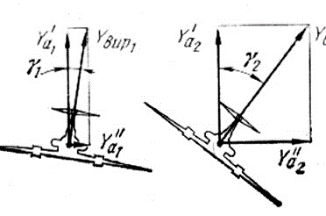
ВИРАЖ
Вираж – это полет самолета по криволинейной траектории в горизонтальной плоскости с разворотом на 360  . Вираж, выполняемый без скольжения при постоянной скорости с постоянным углом крена, называется правильным. Часть виража называется разворотом.
. Вираж, выполняемый без скольжения при постоянной скорости с постоянным углом крена, называется правильным. Часть виража называется разворотом.
Правильный вираж относится к установившемуся виду движения самолета.
В зависимости от угла крена виражи делятся на мелкие (  ) и глубокие (
) и глубокие (  > 45
> 45  ).
).
Для выполнения виража необходимо, чтобы на самолет действовала сила, искривляющая траекторию и направленная перпендикулярно к ней (см. рис. 4.14.)Такой силой является боковая сила Y  =Y sin
=Y sin  (где
(где  — угол крена), которая создается подъемной силой при крене. Поэтому движение самолета при вираже описывается тремя уравнениями: проекции сил на оси Х
— угол крена), которая создается подъемной силой при крене. Поэтому движение самолета при вираже описывается тремя уравнениями: проекции сил на оси Х  , У
, У  и на боковую ось Z .
и на боковую ось Z .
Таким образом, условия равновесия сил, действующих на самолет при вираже, имеют вид:
1) G =Y  = Y cos
= Y cos  — условие горизонтальности маневра;
— условие горизонтальности маневра;
2) P = X – условие постоянства скорости;
3) Y sin  =
=  — неуравновешенная центростремительная сила, сообщающая самолету нормальное ускорение и искривляющая траекторию
— неуравновешенная центростремительная сила, сообщающая самолету нормальное ускорение и искривляющая траекторию
в горизонтальной плоскости (m – масса самолета, V – скорость виража, к – радиус виража).
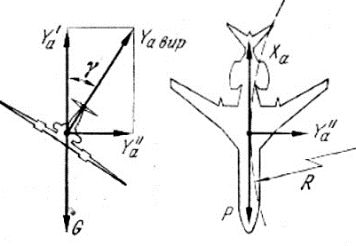
| Рис. 4.14. Вираж |
Из уравнения 1
Y =  ,
,
т.е.подъемная сила при вираже больше веса самолета.
Величина, показывающая во сколько раз подъемная сила самолета больше его веса, называется перегрузкой самолета. Зависимость между перегрузкой n  =
=  и углом крена
и углом крена  имеет следующий вид:
имеет следующий вид:
n  =
=  .
.
Чем больше угол крена при правильном вираже, тем больше перегрузка.
Физиологические пределы перегрузок для человеческого организма зависят от направления и времени их воздействия. Положительные перегрузки, прижимающие человека к сиденью, переносятся легче, чем отрицательные, отрывающие от сиденья. Предельная положительная перегрузка для человека при длительном воздействии равна 8…9, а отрицательная – от -4 до -6.
Чем больше крен, тем интенсивнее возрастает перегрузка при его дальнейшем увеличении.
При вираже с углом крена 60  нужно создать перегрузку n
нужно создать перегрузку n  = 2, а при угле крена 75-80
= 2, а при угле крена 75-80  коэффициент перегрузки n
коэффициент перегрузки n  = 4…6. С приближением крена к 90
= 4…6. С приближением крена к 90  перегрузка, потребная для виража, стремится к бесконечности.
перегрузка, потребная для виража, стремится к бесконечности.
Скорость виража можно определить из равенства G = Y cos  :
:
V =  = V
= V 
 = V
= V 
 .
.
Как и скорость горизонтального полета, скорость виража зависит от полетного веса самолета, плотности воздуха, коэффициента подъемной силы и угла крена.
Тяга, потребная на вираже, определяется из условия P = X .
P  = CX S
= CX S  = CX S
= CX S  n
n  ;
;
P  = P
= P  n
n 
т.о, тяга на вираже нужна больше, чем в горизонтальном полете.
К основным параметрам виража относятся радиус виража, время виража и угловая скорость виража.
Радиус виража определится из уравнения 3:
r =  =
= 
Из формулы видно, что радиус виража зависит от квадрата скорости полета. Радиус виража можно уменьшить, увеличив перегрузку, т.е. увеличив крен самолета.
При правильном вираже  и
и  , поэтому r = const, т.е. траекторией полета является окружность.
, поэтому r = const, т.е. траекторией полета является окружность.
Продолжительность правильного виража можно найти, разделив длину траектории виража (2  )
)
на скорость:
t =  = 0,64
= 0,64  , где
, где  = 0,64
= 0,64
При выполнении виража самолет имеет угловую скорость
На большинстве современных самолетов вираж выполняется с помощью элеронов почти без использования руля направления.
Дата добавления: 2016-12-27; просмотров: 18410;
Поиск по сайту
Узнать еще
- I.3.1 РАБОТА. МОЩНОСТЬ
- I.4.3 РАБОТА. МОЩНОСТЬ. ЭНЕРГИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
- Активная, реактивная, полная мощность
- Алгоритм зависимости длины горизонтального ствола от расхода закачиваемого газа в ПХГ.
- АЭРОДИНАМИКА ПЕРЕВЕРНУТОГО ПОЛЕТА
- Больше поток — больше мощность
- В тяжёлых грунтах, при наборе грунта в ковш скрепера, когда не хватает усилия тягача, применяют тракторы-толкачи только на период зарезания.
- Ветроустановка мощностью 0.1 кВт, ВЭУ-0.1

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
