Общие сведения о пространственных фермах
Пространственные системы подобно плоским в большинстве случаев являются неизменяемыми, поскольку они, как правило, несут различного вида нагрузки. Все рассуждения о поведении изменяемых и мгновенно изменяемых систем при различных нагрузках, а также и соображения об их применении, которые были приведены для плоских систем, принципиально сохраняют свою силу и для систем пространственных. Всякую неизменяемую пространственную систему будем называть телом. Каждое свободное тело по отношению к другому имеет шесть степеней свободы, т. е. может совершать три поступательных перемещения и три поворота. Соединение отдельных тел в одно неизменяемое тело производится при помощи связей. Каждая связь имеет кинематическую и статическую характеристики. Кинематические характеристики связей будем рассматривать при бесконечно малых перемещениях.
Различают следующие виды связей пространственных систем.
Стержень с шаровыми щарнирами по концам, допускающим повороты в любом направлении (плоско-подвижная шаровая связь — рис. 2, а). Кинематическая характеристика: связь уничтожает поступательное перемещение присоединяемого тела вдоль стержня (по оси у), т. е. уничтожает одну степень свободы, но допускает поступательное перемещение присоединяемого тела в плоскости, перпендикулярной стержню (две степени свободы), и повороты вокруг трех осей, проходящих, например, через шаровой шарнир (три степени свободы). Статическая характеристика: в связи может возникать реактивная сила вдоль стержня. Стержень с шаровыми шарнирами по концам является основным элементарным видом связи пространственных систем. Связи остальных видов обычно являются различной комбинацией нескольких таких стержней.
Два стержня с общим шаровым шарниром на одном из их концов (линейно-подвижная шаровая связь — рис. 2, б). Кинематическая характеристика: связь уничтожает поступательные перемещения в плоскости двух стержней (в плоскости хОу), т. е. уничтожает две степени свободы, но допускает поступательное перемещение присоединяемого тела по прямой, перпендикулярной плоскости двух стержней (по оси у — одна степень свободы), и повороты вокруг трех осей, проходящих, например, через общий шарнир (три степени свободы). Статическая характеристика: в связи может возникать реактивная сила, лежащая в плоскости стержней и проходящая через общий шарнир, которая может быть разложена на две составляющие.
Два параллельных стержня (плоско-подвижная связь с двумя поворотами— рис. 2, в). Кинематическая характеристика: связь уничтожает поступательное перемещение присоединяемого тела вдоль стержней (по оси у) и поворот в их плоскости (в плоскости yOz), т. е. уничтожает две степени свободы, но допускает поступательное перемещение присоединяемого тела по направлению, перпендикулярному стержням (в плоскости хОz — две степени свободы), и два поворота вокруг вертикальной и горизонтальной осей, например проходящих через два шарнира (вокруг осей у и z — две степени свободы). Статическая характеристика: в связи могут возникать две реактивные силы вдоль стержней, которые могут быть сведены к силе, действующей параллельно стержням, и паре сил в плоскости стержней.
Три стержня, не лежащие в одной плоскости, с общим шаровым шарниром на одном из их концов (неподвижная шаровая связь или шаровой шарнир – рис. 2, г). Кинематическая характеристика: связь уничтожает все три поступательные перемещения присоединяемого тела, т. е. уничтожает три степени свободы, но допускает повороты вокруг трех осей, проходящие через общий шарнир (три степени свободы). Статическая характеристика: в связи может возникать реактивная сила, проходящая через общий шарнир, которая может быть разложена на три составляющие.
5. Три параллельных стержня, не лежащих в одной плоскости (плоско-подвижная связь с одним поворотом — рис. 2, д). Кинематическая характеристика: связь уничтожает поступательное перемещение присоединяемого тела вдоль стержней (по оси у) и два поворота вокруг осей х и z, т. е. уничтожает три степени свободы, но допускает поступательное перемещение присоединяемого тела в плоскости, перпендикулярной стержням (в плоскости хОz, — две степени свободы), и поворот вокруг оси, параллельной стержням (параллельно оси у одна степень свободы). Статическая характеристика: в связи могут возникать три реактивные силы по направлению трех стержней, которые могут быть сведены к силе, действующей, например, вдоль углового стержня, и к двум парам сил в плоскостях хОу и zOy.
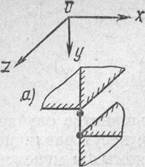 |
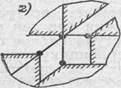

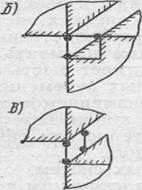

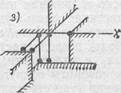
Рис. 2
Три стержня в одной плоскости, из которых два параллельны, а третий имеет общий шаровой шарнир с одним из них (линейно-подвижная связь с двумя поворотами — рис. 2, е). Кинематическая характеристика: связь уничтожает поступательные перемещения и поворот присоединяемого тела в плоскости стержней (в плоскости хОу), т. е. уничтожает три степени свободы, но допускает поступательное перемещение по прямой, перпендикулярной плоскости стержней (одна степень свободы), и два поворота, например, вокруг осей х и у (две степени свободы). Статическая характеристика: в связи могут возникать реактивные силы вдоль стержней, которые могут быть сведены к силе и паре сил в плоскости стержней.
Припайка (неподвижная связь без поворотов — рис. 2, ж). Кинематическая характеристика: связь уничтожает все перемещения присоединяемого тела, т. е. уничтожает все шесть степеней свободы. Статическая характеристика: в связи могут возникать три реактивные силы по направлениям координатных осей и три реактивных момента в координатных плоскостях. Припайка эквивалентна шести стержням.
Кроме рассмотренных простых связей возможны и более сложные, получаемые из простых добавлением стержней. Так, например, если к связи (рис. 2, г) добавить два стержня, препятствующих поворотам вокруг двух осей, получим так называемый цилиндрический шарнир, допускающий поворот только вокруг одной оси х, проходящей через шаровые шарниры на концах пяти стержней (рис. 2, з).
Дата добавления: 2016-11-29; просмотров: 2289;
Поиск по сайту
Узнать еще
- I. Общие принципы структурно-функциональной организации клетки и её компоненты. Плазмолемма, её структура и функции.
- I. Тотальные (общие) морфологические признаки.
- II. Общие методические принципы в канистерапии
- III. Старение и усталость. Вибрация. Коррозия деталей машин. Краткие сведения по теории трения. Виды трения. Основные требования и определения
- А. ПРЕДВАРИТЕЛЬНЫЕ СВЕДЕНИЯ
- А. Сведения о трубах и сварных фасонных деталях
- Абсолютные числа разводов и общие коэффициенты разводимости в США и СССР,
- Бинарные и общие задачи удовлетворения ограничений

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
