Проектирование захватных устройств ВПМ
Задание:
1. Провести сравнительный анализ четырех конкурирующих схем захватных устройств ВПМ и выбрать предпочтительную схему с точки зрения минимума металлоемкости.
2. Разработать для принятой схемы захватного устройства компоновочно-кинематическую схему.
3. Определить расчетную нагрузку на рычаг захватного устройства.
4. Составить расчетную схему для проверки прочности рычага.
5. Провести анализ нагрузок рычага.
Исходные данные:
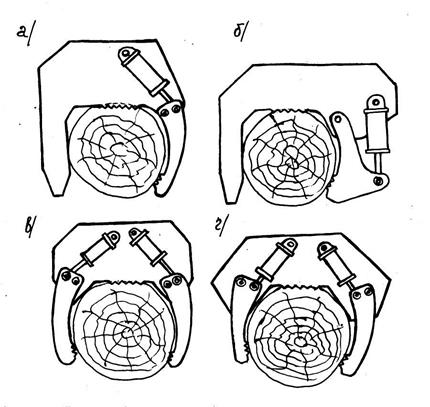
1. Типовые захватные устройства ВТМ и ВПМ приведены на рис. 1.2.
2. Максимальный диаметр дерева на срезе  см.
см.
3. Минимальный диаметр дерева на срезе  = 15 см.
= 15 см.
4. Давление жидкости в гидросистеме P = 15 МПа.
5. Расчеты вести для березы по второму разряду высоты.
|
| Рис. 1.2. Типовые схемы захватных устройств |
Результаты выполнения исследования по теме:
1. Сопоставление между собой 4-х схем, заданных на рис. 1.2, по общей массе рычагов и гидроцилиндров приводит к качественному выводу – однорычажная схема лучше. Поэтому, если на выбор схемы никаких других ограничений не накладывается, то целесообразно взять однорычажную схему.
Из двух однорычажных схем (а и б) предпочтение следует отдать схеме а, поскольку для этой схемы возможно захватный рычаг выполнить равнопрочным (минимальной массы). Рычаг в схеме б имеет более сложную конфигурацию, и его не представляется возможным выполнить равнопрочным.
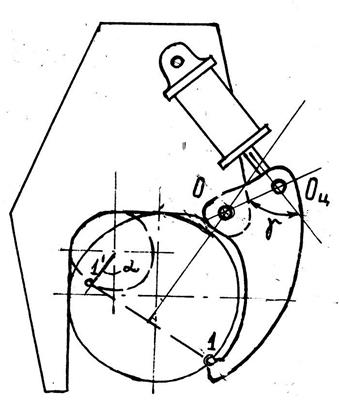
Базой для разработки компоновочно-кинематической схемы захватного устройства являются максимальный и минимальный диаметры захватываемого дерева. Изобразив эти диаметры, как это показано на рис. 1.3, и задавшись положением крайней точки рычага 1 при обжатии дерева максимального диаметра и при обжатии дерева минимального диаметра, находим геометрическим построением положение оси подвески рычага (положение неподвижного шарнира О). Что касается положения подвижного шарнира (точки Оц), то его следует определять путём исследования сопряжения рычага с гидроцилиндром. Так или иначе положением точки Оц надо задаваться. Поэтому отметим лишь те варьируемые параметры, которые соответствуют выбору точки Оц. Таких параметров три: максимальный угол поворота рычага β, угол между линией ООц и осью гидроцилиндра и расстояния между шарнирами ООц = b. Максимальный угол β определяется компоновкой рычага, а также величиной предварительного раскрытия рычага при наведении захватного устройства на дерево. Угол γ выбирается из конструктивных соображений, а расстояние b назначается исходя из желания получить возможно меньшее усилие на штоке гидроцилиндра.
|
| Рис. 1.3. Двухрычажная схема |
Итак, примем некоторую совокупность параметров β, γ, b в качестве исходной компоновки.
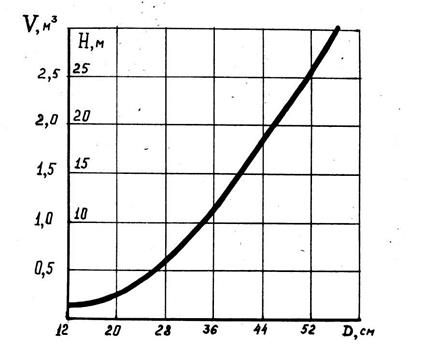
Для определения нагрузок на рычаг ЗУ требуется знать усилие взаимодействия рычага с деревом в точке 1 и плечи рычага hN, hF, hY. Усилие (реакции в точке 1) определяется для расчетного случая подтаскивания дерева манипулятором. Для этого сначала находим объем ствола по диаметру на высоте груди для второго разряда высоты.
При  см из графика зависимости V=f(D), приведённого на рис. 1.4, находим V = 1,8 м3.
см из графика зависимости V=f(D), приведённого на рис. 1.4, находим V = 1,8 м3.
|
| Рис. 1.4. График зависимости V=f(D) |
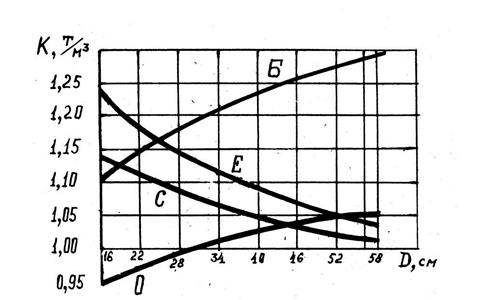
Для определения массы дерева по объёму находим коэффициент К = f(D) для заданной породы. Для берёзы из графика (рис. 1.5) находим К = 1,26.
|
Дата добавления: 2016-11-26; просмотров: 1555;
Поиск по сайту
Узнать еще
- I. Режимы работы электротехнических устройств.
- II. Особенности политического устройства Ирана
- IV. Термодатчики, их устройство и назначение.
- Table 1. Функции ГИС для лесного хозяйства и лесоустройства
- VI. КОМБИНАЦИОННЫЕ ЦИФРОВЫЕ УСТРОЙСТВА
- VI. ПОСЛЕДОВАТЕЛЬНОСТНЫЕ ЦИФРОВЫЕ УСТРОЙСТВА
- VI. УСТРОЙСТВО ВЫХОДОВ ИЗ ГОРНЫХ ВЫРАБОТОК
- XLII. ПОДВЕСНЫЕ И ПРИЦЕПНЫЕ УСТРОЙСТВА

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
