Система ЧПУ фирмы Siemens
СЧПУ фирмы Siemens являются высококачественными системами управления для обрабатывающих станков. ЧПУ Siemens представлены такими сериями: SINUMERIK 802D, SINUMERIK 810D, SINUMERIK 840D (рис. 1.4).

Рис. 2.5. СЧПУ фирмы Siemens
СЧПУ фирмы Siemens представляют собой целостный комплекс взаимодействующих компонентов: устройство ЧПУ — управляющее ядро системы, компоненты управления для общения оператора с системой, контролирующий электроавтоматику, силовые исполнители: привода и двигатели в различных исполнениях в зависимости от задач, обратные связи измерительных систем, соединительные силовые и сигнальные кабели и программное обеспечение: системное, операторское, ввода в эксплуатацию, администрирования и информационного обмена.
Фирма Siemens разработала две группы УЧПУ:
1) Семейство SINUMERIK 802C, 802S, 802D, которое ориентировано на применение в простых токарных и фрезерных станках. Эти УЧПУ ограничены по количеству осей и имеют оптимальные функциональные возможности, соответствующие их назначению.
2) Семейство SINUMERIK 810D, 840D. SINUMERIK 810D – для станков с небольшими рабочими усилиями. SINUMERIK 840D - наиболее распространенное базовое модульное УЧПУ для широкого круга станков и технологических задач.
Подсистема приводов
Подсистема приводов включает двигатель и передачу для преобразования вращательного движения в поступательное перемещение исполнительных органов станка.
А) Высокоточные ходовые винты
Они расположены на днище стола, где закреплена гайка. При повороте винта гайка перемещается и происходит линейное движение стола.
Усовершенствованные ходовые винты позволяют выполнять перемещение исполнительного органа с минимальным трением и имеют механизм устранения люфта.
Б) Двигатели
Вращение вала двигателя приводит к повороту высокоточного ходового винта и линейному перемещению рабочего стола. В конструкции станков используются шаговые электродвигатели и серводвигатели. Шаговый электродвигатель - это электромеханическое устройство, преобразующее электрический сигнал управления в дискретное механическое перемещение. Существует несколько основных видов шаговых двигателей, отличающихся конструктивным исполнением:
1. шаговые двигатели с переменным магнитным сопротивлением;
2. шаговые двигатели с постоянным магнитным сопротивлением;
3. гибридные двигатели.
Принцип работы у всех этих двигателей примерно одинаков и достаточно прост.
Шаговый двигатель с переменным магнитным сопротивлением имеет несколько полюсов на статоре и ротор из магнитно-мягкого материала (реактивный ротор).
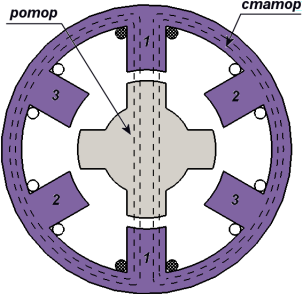
Рис. 2.6. Устройство шагового двигателя с переменным магнитным сопротивлением:
шесть полюсов на статоре, ротор с четырьмя зубьями,
три независимые обмотки
При подаче электрического тока в одну из обмоток ротор стремится занять положение, при котором возникший магнитный поток будет замкнут. То есть зубья ротора будут находиться напротив соответствующих полюсов статора. Если подать его в следующую обмотку, то ротор повернется на один шаг. Для непрерывного вращения ротора необходимо попеременно подавать электрический ток в 1, 2 и 3 обмотки, при этом шаг по углу вращения для представленного двигателя составит 30°.
Шаговый двигатель с постоянными магнитами состоит из статора с обмотками и ротора с постоянными магнитами.
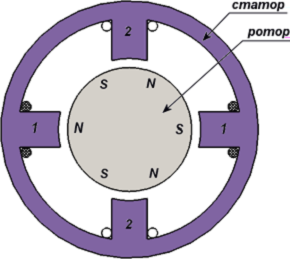
Рис. 2.7. Устройство шагового двигателя с постоянными магнитами:
две пары полюсов статора и три пары полюсов ротора
При подаче электрического тока в одну из обмоток ротор займет положение, при котором разноименные полюса статора и ротора будут находиться напротив друг друга. Для непрерывного вращения ротора необходимо попеременно подавать электрический ток в 1 и 2 обмотки.
Большинство современных шаговых электродвигателей являются гибридными, то есть сочетают достоинства двигателей с переменным магнитным полем и двигателей с постоянными магнитами, имеют большее число полюсов статора и зубьев ротора. Шаг вращения при (дискрета) может достигать одного и менее градуса.
Когда подсистема управления посылает шаговому двигателю электрический импульс, то происходит поворот ротора на определенный угол. Если ходовой винт имеет шаг 1 мм, а дискрета угла имеет 1 градус, то за один импульс исполнительный орган станка переместиться на величину 2,8 мкм. Эта величина называется разрешением системы, или ценой импульса. Нельзя переместить исполнительный орган на величину, меньшую, чем разрешение системы.
Простота конструкции и легкость управления сделали шаговые электродвигатели очень популярными. Основным минусом двигателей этого типа является их толчковая или дискретная работа, которая может привести к ухудшению качества чистовой обработки поверхностей и эффекту «ступенек» на поверхности. Однако шаговые двигатели могут работать без использования дорогостоящей и сложной обратной связи. Это позволяет создавать недорогие, хотя и не высокоточные станки.
Самые современные станки с ЧПУ оснащаются серводвигателями, которые имеют более сложную конструкцию. Серводвигатели, в отличие от шаговых двигателей, работают гладко, имеют лучшие характеристики, но ими тяжелее управлять.

Рис. 2.8. Сервопривод
Для работы с серводвигателем необходимо наличие специальных контроллеров и устройств обратной связи, что, несомненно, приводит к увеличению стоимости станка.
В последнее время на высокоточных станках стали использоваться ролико-винтовые передачи.
Рис. 2.9. Ролико-винтовая передача
Дата добавления: 2021-02-19; просмотров: 709;
Поиск по сайту
Узнать еще
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- DSM — система классификации Американской психиатрической ассоциации
- II. НАЛОГОВАЯ СИСТЕМА В СОВРЕМЕННОЙ РОССИИ
- II. Научность, систематичность и последовательность обучения.
- SWOT-матрица торговой фирмы
- Єдина державна система цивільної оборони населення та територій
- Ідеальна центрована оптична система

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
