В системах управления и автоматизации
Материальным носителем информации при автоматизации управления технологическими объектами является сигнал. Сигналы текущей информации о состоянии ТОУ вырабатываются датчиками и далее обрабатываются каналами обратной связи.
В преобразовании сигналов прямой и обратной связи можно выделить два аспекта:
- преобразование природы, формы и параметров сигнала (усиление, формирование, модуляция, квантование и пр.);
- установление однозначного соответствия между отдельными видами сигналов и состояниями управляемого и контролируемого параметров (кодирование: состояние – сигнал; перекодирование: сигнал – сигнал; декодирование: сигнал – состояние).
Для управления ТОУ наиболее часто используются электрические сигналы, реже – механические, пневматические, гидравлические. Классификация представления сигналов в системах управления (СУ) ТОУ приведена на рис.1.2.
Рис.1.2. Классификация представления сигналов в СУ ТОУ
В соответствии с классификацией сигналы делятся на две группы:
- аналоговые или непрерывные, способные в определенном диапазоне находиться в бесконечно большом количестве состояний;
- дискретные, способные в определенном интервале находиться в конечном числе состояний (ток в цепи, коммутируемой реле; выходной сигнал логического элемента или узла цифровой схемы и т.д.).
Аналоговые сигналы могут быть потенциальными с линейным и нелинейным преобразованиями первичного состояния параметра и гармоническими, отрабатывающими изменение первичного состояния параметра соответствующим изменением амплитуды, частоты или фазы сигнала. Получение первых осуществляется более простыми устройствами, вторые являются более гибкими, устойчивыми к помехам, позволяют осуществлять гальваническую развязку цепей.
Дискретные сигналы бывают квантованными по уровню и времени. Они являются лишь определенным приближением к аналогу параметра, измеряемого датчиками или полученного в преобразованном виде.
Для источников аналоговых сигналов характерна большая, чем у дискретных, чувствительность к помехам и инструментальным погрешностям преобразователей (дрейф нуля, температурные колебания коэффициентов усиления и т.п.). Источники дискретных сигналов лишены этих недостатков, т.к. образующие их элементы работают не в усилительном, а в релейном режиме.
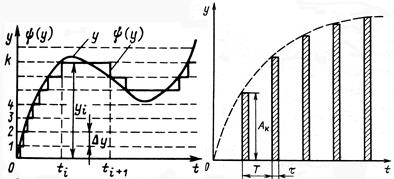
Квантование сигналов по уровню (рис.1.3, а) сводится к замене текущих значений непрерывного сигнала конечным числом его уровней. В результате непрерывный сигнал y(t) заменяется ступенчатой функцией  . Разность уровней Dy(t) называется разрешающей способностью сигнала или шагом квантования по уровню.
. Разность уровней Dy(t) называется разрешающей способностью сигнала или шагом квантования по уровню.
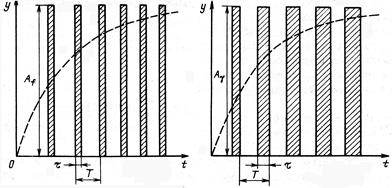
Квантование непрерывного сигнала y(t) по времени сводится к замене большого числа значений непрерывного сигнала конечным числом мгновенных значений, фиксируемых через определенный промежуток времени Т = Dt. Последний называется шагом квантования или периодом квантования по времени и может быть постоянным или переменным. Дискретные сигналы могут быть представлены в виде импульсов, модулированных по амплитуде А, частоте f = 1/Т и скважности g=t/T, как показано на рис.1.3, б, в, г.
При амплитудной модуляции в моменты времени tк значение амплитуды импульса Ак равно значению непрерывного сигнала в данный момент времени. При модулировании по частоте – частота импульсов пропорциональна аналоговому сигналу; при модуляции по скважности – скважность пропорциональна измеряемому сигналу.
Следовательно, при модуляции по частоте и скважности амплитуды дискретного сигнала Аf и  остаются неизменными (рис.1.3, в, г), а изменяются пропорционально исходному аналоговому сигналу соответственно период квантованного сигнала Тi (на рис.1.3, в Тi уменьшается, т.е. увеличивается
остаются неизменными (рис.1.3, в, г), а изменяются пропорционально исходному аналоговому сигналу соответственно период квантованного сигнала Тi (на рис.1.3, в Тi уменьшается, т.е. увеличивается  ) и длительность импульсов
) и длительность импульсов  (на рис.1.3, г возрастает, т.е. возрастает
(на рис.1.3, г возрастает, т.е. возрастает  ).
).
а) б )
в) г)
Рис.1.3. Квантование сигналов:
а – по уровню, б, в,г - по времени, где б – модулирование по амплитуде;
в – по частоте; г – по скважности
Дата добавления: 2016-11-04; просмотров: 1994;
Поиск по сайту
Узнать еще
- CRM - стратегия управления взаимоотношениями с клиентом
- II. В сравнении с другими органами управления, функционирующих на профессиональной основе
- R-Keeper v 6 - система автоматизации ресторанов
- Автоматизации и управления
- Автоматизация как направление дальнейшего совершенствования управления силами и средствами
- Автоматизация технологического проектирования. Основные задачи и модели автоматизации технологического проектирования
- Автоматизированная система диспетчерского управления
- Автоматизированная система оперативного управления перевозками (АСОУП)

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
