НОВАЯ СИСТЕМА ТРАНСФОРМАТОРОВ И МОТОРОВ ПЕРЕМЕННОГО ТОКА
Я очень хочу выразить свою благодарность Профессору Энтони, за его помощь, которую он оказал в данном вопросе. Я также хотел бы выразить мою признательность М-ру Попу и М-ру Мартину за их содействие. Извещение пришло относительно недавно, и я не смог рассмотреть предмет столь широко, как мне бы того хотелось, так как мое здоровье сейчас не и лучшем состоянии. Я прошу о вашем любезном снисхождении, и буду глубоко удовлетворен, если то немногое, что я сделал, встретит ваше одобрение.
При сегодняшней разнородности мнений касательно относительных достоинств систем переменного и постоянного тока огромное значение придается вопросу, могут ли переменные токи успешно применяться в работе моторов. Трансформаторы, со всеми их преимуществами, дали нам сравнительно совершенную систему распределения. И хотя, как во всех областях техники, желательны еще многие усовершенствования, в этом направлении осталось сделать сравнительно немного. Передача энергии, напротив, практически полностью ограничена использованием постоянных токов, и несмотря на то, что для использования переменных токов было предпринято множество усилий, они, по крайней мере насколько известно, не дали желаемого результата. Из разнообразных моторов, приспособленных для работы в цепях переменного тока, отмечались следующие: 1. Последовательный мотор с разделенным полем. 2. Генератор переменного тока, поле которого возбуждается постоянными токами. 3. Мотор Элиу Томпсона. 4. Мото р с комбинированным переменным и постоянным током. И еще два мотора этого вида пришли мне в голову. 1. Мотор, одна из цепей которого подключается последовательно с генератором, а другая — во вторичную цепь трансформатора. 2. Мотор, у которого цепь якоря подключена к генератору, и обмотки возбуждения замкнуты на себя. Эти я. впрочем, упоминаю лишь мимоходом.
Предмет, который я сейчас имею удовольствие представить вашему вниманию, — это новая система распределения и передачи электрической энергии посредством переменных токов, дающая особые преимущества, особенно в плане моторов, которая, я уверен, сразу же даст превосходную применимость этих токов для передачи энергии и покажет, что многие результаты, до сих пор недосягаемые, с их применением достигаются; результаты, которые столь желательны в практической работе подобных, систем, и которые недостижимы при посредстве постоянных токов.
Прежде чем вдаваться в детали описания этой системы, я думаю, необходимо сделать несколько замечаний относительно определенных условий, присутствующих в генераторах и моторах постоянного тока, которыми, хотя они и хорошо известны, часто пренебрегают.
В наших динамо машинах, как известно, мы генерируем переменные токи, которые выпрямляем посредством коммутатора, этого довольно сложного устройства, и, можно так сказать, источника большинства проблем, возникающих в работе этих машин. Далее, токи, выпрямленные таким образом, не могут использоваться в моторе, но они должны — и опять посредством подобного ненадежного устройства, — быть вновь преобразованы в свое первоначальное состояние — переменный ток. Функция коммутатора чисто внешняя, и пи в коей мере не влияет на внутреннюю работу машин. Следовательно, на самом деле, все машины — это машины переменного тока, так как токи предстают в виде постоянных только во внешней цепи во время их передачи от генератора к мотору. И только ввиду этого факта переменные токи должны были привлечь к себе внимание как более непосредственное применение электрической энергии, и применение постоянный токов становилось бы оправданным, только если бы были динамо, которые сразу первоначально генерируют их, и моторы, которые бы приводились в действие непосредственно такими токами.
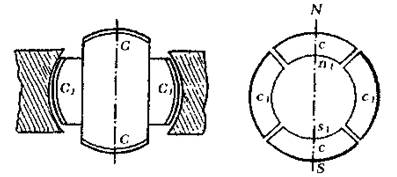
Рис. 1. Рис. 1а.
Но работа коммутатора в моторе двойная; во-первых, он обращает токи, идущие через мотор, и во-вторых, он выполняет, автоматически, прогрессивный сдвиг полюсов одной из его магнитных составляющих. Далее, допуская, что обе этих бессмысленных операции, то есть выпрямление переменных токов в генераторе и реверсирование постоянных токов в моторе, исключаются, все равно было бы нужно, для того, чтобы вызвать вращение мотора, получать прогрессивное смещение полюсов одного из его элементов, и сам собой встает вопрос — Как выполнить эту операцию непосредственно с помощью воздействия переменного тока? Теперь я перейду к объяснению того, как это выполняется.
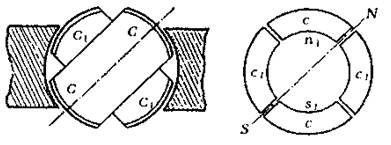
Рис. 2. Рис. 2а.
В первом эксперименте барабанный якорь имел две обмотки под прямыми углами друг к другу, и концы этих обмоток подключались к двум парам изолированных контактных колец, как это делается обычно. Кольцо было сделано из тонких изолированных пластин листового железа и обмотано четырьмя обмотками, каждые две противоположные из которых соединялись друг с другом так, чтобы давать свободные полюса на диаметрально противоположных сторонах кольца. Остальные свободные контакты обмоток подключались к контактному кольцу якоря генератора, так что образовывалось две независимые цепи, как показано на рисунке 9. Теперь можно видеть, какие результаты достигались подобной комбинацией, и я буду ссылаться в этом отношении на схемы на рисунках с 1 до 8а. Когда поле генератора возбуждается независимо, вращение якоря устанавливает в обмотках СС токи, меняющиеся по силе и направлению хорошо известным образом. В положении, показанном на рисунке 1, ток в обмотке С нулевой, тогда как через обмотку С 1 проходит ее максимальный ток, и наши соединения устроены так, что кольцо намагничивается обмотками С 1 С 1, как показано буквами N S на рисунке 1а, а намагничивающий эффект обмоток с с нулевой, потому что эти обмотки включены в цепь обмотки С.
На рисунке 2 обмотки якоря показаны в следующем положении, когда уже совершена одна восьмая одного оборота. Рисунок 2а иллюстрирует соответствующие магнитные состояния кольца. В данный момент обмотка С 1 генерирует ток того же направления, что и перед этим, но слабее, создавая в кольце полюса N1 S 1; обмотка с также генерирует ток того же направления, и соединения таковы, что обмотки с с создают полюса N S, как показано на рисунке 2а. Результирующая полярность указана буквами N S, и можно наблюдать, что полюса кольца сдвинулись на одну восьмую его периметра.
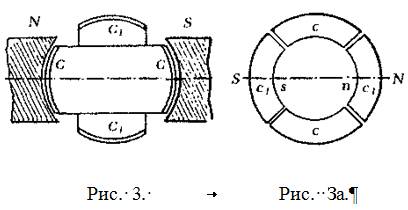
На рисунке 3 якорь прошел одну четвертую оборота. На этой фазе ток и обмотке С максимален, и его направление таково, что дает полюса N S, как на рисунке За, при этом ток в обмотке С1 пулевой, эта обмотка находится в своем нейтральном положении. Полюса N S па рисунке За, таким образом, сдвинуты на одну четвертую окружности кольца.
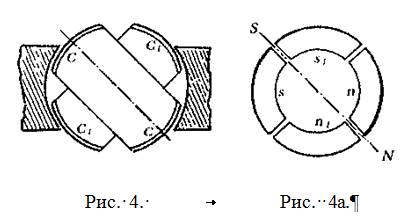
Рисунок 4 показывает обмотки С С еще более продвинутом положении, когда якорь прошел три восьмых оборота. В этот момент обмотка С пока что генерирует ток того же направления, что и раньше, но меньшей силы, создавая сравнительно более слабые полюса n s на рисунке 4а. Ток в обмотке С 1 той же силы, но противоположного направления. В результате, он создает на кольце полюса N j Sj, как показано, и полярность N S, в итоге, при этом полюса сдвигаются на три восьмых периметра кольца.
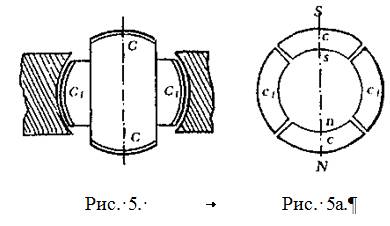
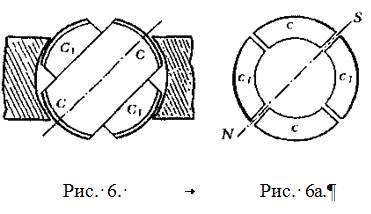
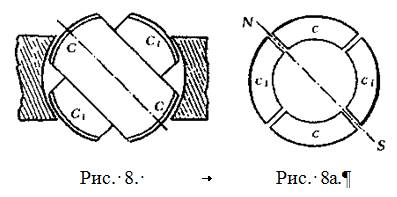
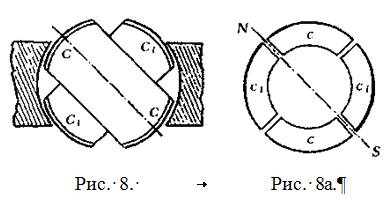
На рисунке 5 пройдена половина оборота якоря, и возникающее в результате магнитное ноле показано на рисунка 5а. Теперь ток в обмотке С нулевой, а по обмотке С/ течет ее максимальный ток, имеющий то же направление, что и перед этим; намагничивающий эффект, таким образом, обуславливается только обмоткой С/ с j, и следуя рисунку 5а, можно увидеть, что полюса N S сдвинулись на одну вторую окружности кольца. В ходе следующего полуоборота действия повторяются, как показано на рисунках с 6 по 8а.
Если посмотреть на схемы, становится ясно, что в ходе одного оборота якоря полюса кольца сдвигаются один ра з по его окружности, а каждый оборот вызывая те же эффекты, в результате быстрое вращение полюсов согласуется с вращением якоря. Если соединения любой из обмоток на кольце поменять на обратные, сдвиг полюсов будет происходить в обратном направлении, но действие будет точно тем же самым. Вместо того, чтобы использовать четыре провода, с тем же эффектом можно использовать три провода, из которых один является общим обратным проводом для обеих цепей.
Это вращение или верчение полюсов проявляет себя в целой серии любопытных явлений. Если аккуратно укрепленный на оси диск из стали или другого магнитного металла приблизить к кольцу, он приходит в быстрое вращение, при этом направление вращения меняется от положения диска. Например, если в снаружи кольца он будет вращаться в одну сторону, то внутри кольца направление вращения сменится на обратное, но при этом направление не будет меняться, если его поместить в положение, симметричное кольцу. Это объясняется просто. Каждый раз, когда полюс приближается, он индуцирует противоположный полюс в ближайшей точке диска, и в этой точке образуется притягивание; благодаря этому, по мере того, как полюс двигается, удаляясь от диска, на него действует тангенциальное тянущее усилие, и когда это действие повторяется постоянно, в результате возникает более или менее быстрое вращение диска. Поскольку тянущее усилие действует главным образом на ту часть, которая ближе всего к кольцу, вращение снаружи и внутри, или справа и слева, соответственно, происходит в противоположных направлениях, рисунок 9. При расположении симметрично кольцу, усилия на противоположных сторонах диска одинаковы, и вращения нет. Воздействие основано на магнитной инерции железа; по этой причине на диск из твердой стали воздействие гораздо более сильное, чем на диск из мягкого железа, так как последнее способно к очень быстрым изменениям магнетизма. Такой диск оказался очень полезным инструментом во всех этих исследованиях, поскольку он позволил мне обнаруживать любую нерегулярность работы.
Любопытный эффект также оказывается на железные опилки. Если поместить некоторое их количество на бумагу и держать ее с внешней стороны достаточно близко к кольцу, они приходят в вибрирующее движение, оставаясь на месте, хотя бумагу можно двигать туда и сюда; но при подъеме бумаги на определенную высоту, которая как представляется, зависит от интенсивности полюсов и скорости вращения, их сбрасывает в направлении всегда противоположном воображаемому вращению полюсов. Если бумагу с опилками положить горизонтально на кольцо и внезапно включить ток, легко можно наблюдать наличие магнитного верчения.
Чтобы продемонстрировать полное сходство между кольцом и вращающимся магнитом, за счет механической энергии вращался сильный электромагнит, и наблюдались явления, идентичные вышеупомянутым во всех деталях.
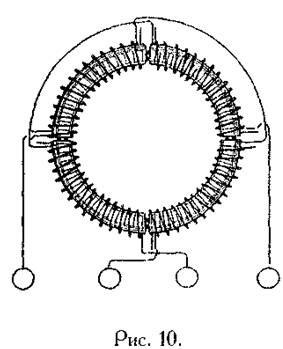
Очевидно, вращение полюсов производит соответствующие индуктивные воздействия и может использоваться для генерации токов в замкнутом проводнике, помещенном в области действия полюсов. Для этой цели удобно обмотать кольцо двумя множествами наложенных друг на друга обмоток, образующих соответственно первичную и вторичную цепи, как показано на рисунку 10. Чтобы обеспечить получение наиболее экономичных результатов, магнитные цепи должны быть полностью закрыты, и имея это в виду, можно менять конструкцию как угодно.
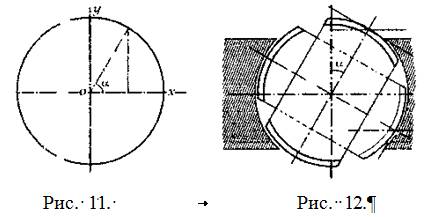
Индуктивный эффект, воздействующий на вторичные обмотки, будет главным образом обусловлен смещением или движение магнитного действия; но могут также существовать и токи, наведенные в обмотках вследствие изменений интенсивности полюсов. Тем не менее, если правильно спроектировать генератор и определить магнитное воздействие первичных обмоток, последнюю составляющую можно заставить исчезнуть. Если поддерживать интенсивность полюсов постоянной, работа прибора будет безупречной, и можно будет получить такой же результат, как если бы смещение производилось посредством коммутатора с бесконечным числом полос. В этом случае теоретическое отношение между возбуждающим воздействием каждого множества первичных обмоток и их результирующим магнитным воздействием можно выразить уравнением круга, центр которого совпадает с центром ортогональной системы осей, в котором радиус представляет собой равнодействующую и координаты обе ее компоненты. Тогда это будут, соответственно, синус и косинус угла а между радиусом и одной из осей (О X). Следуя рисунку 1, имеем r2 = X2 + у2, где X = COS a, a у = sin a.
Полагая магнитное воздействие каждого множества обмоток пропорциональным току — что можно допустить при слабом намагничивании, — получаем тогда X = Кс и у = Кс1 где К — константа, а с и С1 токи в обоих множествах обмоток, соответственно. Далее, полагая, что поле генератора постоянное, имеем постоянную скорость с' = К1 sin а и С = К1 sin (900 +) = = K1 COSa, где К1 — константа. См. рисунок 12.
Таким образом, X = Кс = К К' COS а;
у = Кс! = К К1 sin а, и
К К' = r.
То есть, для постоянного поля расположение двух обмоток под прямыми углами даст теоретический результат, и интенсивность смещения полюсов будет постоянной. Но из r2=x2 + y2; следует, что при у =0, r=x; следовательно, суммарное магнитное воздействие обоих множеств обмоток должно быть равно воздействию одного множества при его максимуме. В трансформаторах и определенном классе моторов флюктуации полюсов не имеют особой важности, но в другом классе этих моторов желательно добиться теоретического резуль- тата.
В результате применения этого принци- па к конструкции моторов были построены два типичных вида моторов. Первый, вид со сравнительно малым вращающим уси- лием на старте, но поддерживающий по- стоянную скорость при любых нагрузках, это мотор, названный синхронным. Вто- рой, вид, демонстрирующий огромное вра- щательное усилие на старте, скорость его находится в зависимости от нагрузки. Эти моторы могут приводиться в действие тремя различными путями: 1. Только от переменных токов источника. 2. Комбинированным воздействием их и индуцированных токов. 3. Совместным воздействием переменных и постоянных токов.
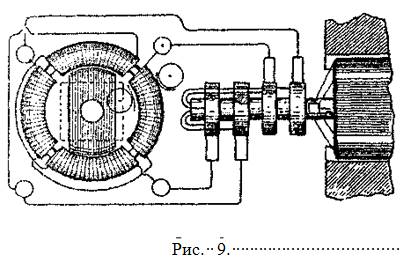
Простейший вид синхронного мотора получается при обматывании листового кольца с полярными выступами четыремя обмотками и подключением их тем же способом, что и описанный выше. Железный диск с вырезанным сегментом с каждой стороны можно использовать в качестве якоря. Такой мотор показан на рисунку 9. Если диск устанавливается так, чтобы он мог свободно вращаться внутри кольца близко к выступам, очевидно, что когда полюса смещаются, он будет, благодаря его стремлению находиться в таком положении, чтобы охватывать наибольшее количество линий силы, тесно следовать движению полюсов, и его движение будет синхронным с движением якоря генератора; то есть, это так в таком конкретном расположении, показанном на рисунку 9, когда якорь за один оборот производит два импульса тока в каждой из своих цепей. Очевидно, что если за один оборот якоря генерируется большее число импульсов, скорость мотора соответственно возрастет. Из того, что притягивание, действующее на диск, наибольшее, когда он находится вблизи полюсов, следует, что такой мотор будет сохранять в точности одну и ту же скорость при всех нагрузках в пределах его мощности.
Чтобы способствовать запуску на старте, диск можно снабдить обмоткой, замкнутой на себя. Преимущество, даваемое такой обмоткой, очевидно. На старте токи, возникающие в обмотке, сильно возбуждают диск и увеличивают притяжение, действующее на него со стороны кольца, и благодаря токам, генерируемым в обмотке, пока скорость якоря много меньше скорости полюсов, мотор может выполнить заметную работу даже если скорость ниже нормальной. При постоянной интенсивности полюсов, когда мотор вращается со своей нормальной скоростью, в обмотке никакие токи не генерируются.
Вместо того, чтобы замыкать катушку на себя, ее концы можно соединить с двумя изолированными скользящими кольцами, и подать постоянный ток от подходящего генератора. Хороший способ запустить такой мотор — это замкнуть катушку на себя до достижения нормальной скорости, или около того, а затем переключить на постоянный ток. Если диск возбуждается постоянным током очень сильно, мотор может не смочь стартовать, но если бы он возбуждался слабо, или вообще так, что магнитное воздействия кольца было бы преобладающим, он запустится и достигнет нормальной скорости. Такой мотор будет сохранять абсолютно ту же самую скорость при всех нагрузках. Также замечено, что если движущей силы генератора недостаточно, соотносясь с мотором скорость генератора уменьшается синхронно со скоростью мотора. Отличительное свойство этого вида моторов, что его нельзя реверсировать за счет реверсирования постоянного тока через обмотку.
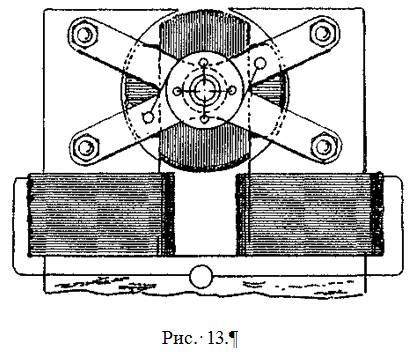
Синхронность этих моторов можно продемонстрировать многими путями экспериментально. Для этой цели самое лучшее использовать мотор, состоящий из магнит с постоянным полем и якорь, устроенный так, чтобы вращаться внутри него, как показано па рисунку 13. В этом случае смещение полюсов якоря вызывает вращение последнего в обратном направлении. Отсюда вытекает, что когда достигается нормальная скорость, полюса якоря принимают фиксированное положение относительно поля магнита, и он намагничивается индукцией, образуя отдельный полюс на каждом из полюсных наконечников. Если в магните применить наконечник из мягкого железа, он на старте будет притягиваться с быстрым вибрирующим движением, вызванным обращениями полюсов магнита, на когда скорость якоря возрастает, вибрации становятся все менее и менее частыми и наконец совсем исчезают. Тогда железо притягивается слабо, но постоянно, указывая, что синхронность достигнута, и возбуждающий магнит возбуждается индукцией.
Диск можно также использовать для эксперимента. Если держать его близко к якорю, он будет вращаться до тех пор, пока скорость вращения полюсов будет превышать скорость вращения якоря; но когда будет достигнута нормальная скорость, или около того, он перестает вращаться и постоянно притягивается. Грубый но показательный эксперимент проделывается с лампой накаливания. Если поместить лампу в цепь с генератором постоянного тока, и последовательно с магнитной обмоткой, то наблюдаются быстрые флюктуации света вследствие индуцированных токов, возникающих в обмотке на старте; когда скорость возрастает, флюктуации появляются с более долгими интервалами, пока не исчезают полностью, указывая, что мотор достиг своей нормальной скорости.
Телефонный приемник оказывается самым чувствительным инструментов; когда он подключается к любой цепи мотора, синхронизация легко обнаруживается по исчезновению индуцированных токов.
В моторах синхронного типа желательно поддерживать количество смещающего магнетизма постоянным, особенно если магниты не подразделены как следует.
Как в этих моторах получить вращательное усилие было предметом долгих раздумий. Чтобы получить этот результат, было нужно так все расположить, чтобы пока полюса одного элемента мотора смещаются переменными токами источника, полюса, получаемые от другого элемента, должны все время находиться в правильном отношении к первым, безотносительно к скорости мотора. Такие условия присутствуют в моторе постоянного тока; но в синхронном моторе, таком как описанный выше, эти условия достигаются, только при нормальной скорости.
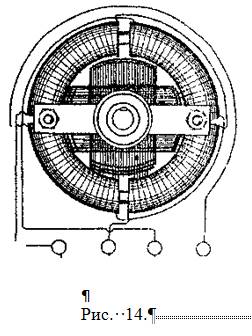
Цель была достигнута, когда внутрь кольца был помещен соответствующим образом подразделенный железный сердечник, обмотанный несколькими независимыми обмотками, замкнутыми на себя. Двух обмоток под прямыми углами на рисунке 14 достаточно, но лучше использовать большее их число. Из этого расположения и следует, что когда полюса кольца смещаются, в замкнутых обмотках якоря генерируются токи. Эти токи наиболее интенсивны и или около точек с наибольшей плотностью линий силы, и в результате они дают полюса на якоре под прямыми углами к полюсам на кольце, по крайней мере в теории это так; и поскольку действие полностью независимо от скорости — то есть, в плане рассмотрения положений полюсов, — на окружность якоря действует постоянное тянущее усилие. Во многом эти моторы похожи на моторы постоянного тока. Если прилагается нагрузка, скорость, а также сопротивление мотора, уменьшается, и через возбуждающие обмотки течет больше тока, таким образом увеличивая усилие. Когда нагрузка удаляется, возрастает противодействующая электродвижущая сила, и через первичные, или возбуждающие, катушки течет меньше тока. Когда нагрузки нет, скорость очень близка к скорости смещения полюсов возбуждающего магнита.
Как будет показано, вращательное усилие этих моторов и моторов постоянного тока полностью эквивалентны. Усилие наибольшее, когда и якорь и возбуждающий магнит не имеют никаких выступов; но даже в такой схеме поле не может быть очень концентрированным, и вероятно наилучшие результаты будут получаться, если оставлять полярные выступы только на одном из этих элементов. В целом, можно утверждать, что выступы уменьшают вращающий момент и вызывают тенденцию к синхронности.
Характерная особенность моторов этого вида — это их способность очень быстро реверсироваться. Это следует из специфики действия мотора. Допустим, якорь вращается, и направление вращения полюсов меняется на обратное. Тогда аппарат превращается в динамо машину, и энергия, приводящая эту машину в движение, — это запасенная кинетическая энергия якоря, а скорость — сумма скоростей якоря и полюсов. Если мы теперь учтем, что мощность, чтобы приводить такое динамо в действие, будет очень близко пропорциональна третьей степени скорости, то уже только по этой причине якорь должен реверсировать очень быстро. Но одновременно с разворотом начинает действовать еще одна составляющая, а именно, когда движение полюсов относительно якоря обращается в противоположную торону, мотор действует как трансформатор, в котором сопротивление вторичной цепи ненормально уменьшено за счет возникновения в этой цепи дополнительной электродвижущей силы. В силу этих причин разворот мгновенный.
Желательно обеспечить постоянную скорость, и в тоже время определенное усилие на старте. Это легко достигается многими путями. Например, на одном валу можно укрепить два якоря, один для крутящего момента, второй для синхронизации, и любой из них сделать преимущественным, или же на якорь намотать так, чтобы получить вращательное усилие, но более или менее выраженную тенденцию к синхронизации может ему придавать правильная конструкция железного сердечника; и многими другими путями.
Для получения требуемой фазы токов в первичной и во вторичной цепях самым простым является расположение с двумя обмотками под прямыми углами, это дает наиболее постоянное действие; но. фазу можно получить и многими другими путями, в зависимости от того, какая машины используется. Для этой цели легко приспосабливаются любые из применяемых сейчас динамо путем подключения к нужным точкам генерирующих обмоток. В якорях с замкнутыми обмотками, таких, как применяются в системах постоянного тока, лучше всего сделать четыре ответвления от равноудаленных точек или пластин коммутатора, и подсоединить их к четырем изолированным скользящим кольцам на валу. В этом случае каждая из цепей мотора получается подключенной к двум диаметрально противоположным полосам коммутатора. При таком расположении мотор может также приводиться в действие от половины потенциала и по трехпроводной схеме, путем подключения цепей мотора в нужном порядке к трем из контактных колец.
В многополярных динамо машинах, какие применяются в конвертерных системах, фаза легко получается с помощью намотки на якорь двух последовательностей обмоток таким образом, чтобы когда обмотки в одном множестве или последовательности находятся в их максимуме генерации тока, обмотки в другом будут в своем нейтральном положении, или около него, таким образом оба множества обмоток могут подвергаться индуцирующему действию возбуждающих магнитов одновременно или последовательно.
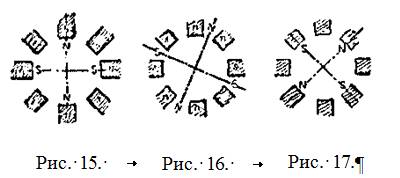
В целом, цепи в моторе будут располагаться сходным образом, и для достижения требований могут применяться разные компоновки; но самая простая и самая практичная — это разместить первичные цепи на стационарных частях мотора, избегая таким образом, по крайней мере в определенных видах, скользящих контактов. В этом случае магнитные обмотки соединяются попеременно в обеих цепях; то есть, 1, 3, 5… в одной и 2, 4, 6… в другой, и обмотки в каждом множестве последовательностей можно соединять тем же образом, или попеременно противоположно; в последнем случае получится мотор с половинным числом полюсов, и его действие поменяется соответствующим образом. На рисунках 15, 16 и 17 показаны три разные фазы, при этом магнитные обмотки в каждой цепи соединены попеременно в противоположном порядке. В данном случае будет всегда четыре полюса, как на рисунках 15 и 17, четыре полярных выступа будут нейтральными, и на рисунке 16 два соседних полярных выступа будут иметь одинаковую полярность. Если обмотки соединены одинаковым образом, то будет восемь переменных полюсов, отмеченных буквами п's' на рис. 15.
Применение многополярных моторов дает в этой системе преимущество, столь желанное и при этом недостижимое в системах постоянного тока, и состоит оно в том, что мотор можно заставить работать на заранее установленной скорости безотносительно к несовершенству конструкции, нагрузке, и, в определенных пределах, электродвижущей силе и силе тока.
В обычной системе питания этого вида следует применять следующий план. На центральной подающей станции должен быть установлен генератор с достаточным количеством полюсов. Моторы, работающие от этого генератора, должны быть синхронного типа, но дающие достаточное вращательное усилие для обеспечения их запуска. Если в конструкции соблюсти надлежащие правила, можно добиться того, что скорость каждого мотора будет в определенной обратной пропорции к его размеру, и число полюсов должно выбираться соответственно. Для специальных нужд это правило может меняться. Ввиду этого будет выгодно снабдить каждый мотор большим числом полярных выступов или обмоток, так чтобы их число было желательно кратно двум или трем. Таким способом, просто меняя соединения обмоток, мотор можно приспособить к любым возможным нуждам.
Если число полюсов в моторе четное, его работа будет согласованной и можно достичь нужного результата; если это не так, то лучший подход, это сделать мотор с двойным количеством полюсов и соединить их тем же образом, как указывалось выше, так чтобы получилось половинное количество полюсов. Предположим, например, что у генератора венадцать полюсов, и нужно получить скорость, равную 12 / 7 скорости генератора. Для этого требуется мотор с семью полярными выступами или магнитами, и в таком моторе нельзя правильным образом соединить цепи, если не сделать четырнадцать якорных обмоток, что необходимо повлечет использование скользящих контактов. Чтобы этого избежать, мотор следует снабдить четырнадцатью магнитами, семь соединены в каждую цепь, и магниты в каждой цепи чередуются друг с другом. Якорь должен иметь четырнадцать замкнутых обмоток. Работа такого мотора не будет столь же хорошей, как при четном количестве полюсов, но недостаток этот серьезным не будет. При этом, вред от этой несимметричной формы будет уменьшаться пропорционально числу добавленных полюсов.
Если у генератора, скажем, п, а у мотора n 1 полюсов, то скорость такого мотора будет равна скорости генератора, помноженной на п/п 1 .
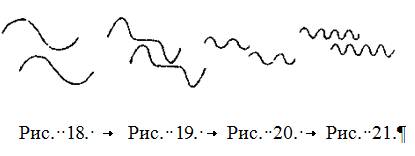
Скорость мотора будет в целом зависеть он числа полюсов, но из этого правила могут быть исключения. Скорость может меняться за счет фазы токов в цепях, или за счет характера импульсов тока, или из-за интервалов между каждыми импульсами или их группами. Некоторые из возможных случаев приведены на схемах, рисунки 18, 19 и 20, которые не требуют объяснений. На рисунку 18 показаны условия, которые присутствуют обычно и обеспечивают самый лучший результат. В этом случае, если применяется типичный вид мотора, показанный на рисунке 9, одна полная волна в каждой цепи будет производить один оборот мотора. На рисунке 19 то же будет происходить в результате одной волны в каждой цепи, если импульсы последовательные; на рисунке 20 четырьмя, а на рисунке 21 — восемью волнами.
Теми же способами можно получить любую нужную скорость; то есть, по крайней мере, в рамках практических потребностей. Данная система обладает этим преимуществом помимо других, вытекающих из ее простоты. При полных нагрузках моторы имеют точно такую же эффективность, как и моторы постоянного тока. Трансформаторы дают дополнительный выигрыш за счет их способности питать моторы. В их конструкции могут делаться аналогичные изменения, тем самым способствуя введение моторов и их приспособление к практическим нуждам. Их эффективность должна быть выше, чем у сегодняшних трансформаторов, и основываюсь в этом утверждении на следующем:
В тех трансформаторах, которые делаются сегодня, мы получаем токи во вторичной цепи путем варьирования силы первичных или возбуждающих токов. Если мы допустим пропорциональность относительно железного сердечника, то индуктивный эффект, который испытывает вторичная обмотка, будет пропорционален числовой сумме вариаций силы возбуждающего тока за единицу времени. Отсюда следует, что при данной вариации любая продолжительность первичного тока будет давать пропорциональную потерю. Чтобы получить быстрые вариации в силе тока, что важно для эффективной индукции, используется большое число ондуляций. Из этого проистекают практические недостатки. Так, например, возрастает стоимость и падает эффективность генератора, теряется больше энергии на нагрев сердечников, также падает выход трансформатора, поскольку сердечник не используется должным образом, и развороты происходят слишком быстро. Индуктивный эффект также очень слаб в определенных фазах, что будет видно из графического представления, и могут возникать периоды бездействия, если между последовательными импульсами тока или волнами есть интервалы. При получении смещения полюсов трансформатора, а значит и при индуцировании токов, индукция идеальная, потому что все время находится в максимуме своего действия. Также оправданно предполагать, что при смещении полюсов будет теряться меньше энергии, чем при разворотах.
ОБСУЖДЕНИЯ
М-р Мартин — Профессор Энтони, я уверен, находится здесь, и поскольку он уделил данному предмету определенное внимание, я думаю, он мог бы должным образом дополнить статью М-ра Теслы некоторыми замечаниями.
М-ра Тесла — Я хочу еще раз выразить мою глубокую благодарность Профессору Энтони за всестороннюю помощь мне, и надеюсь, что он сможет объяснить многие из особенностей этой системы, которые я не смог объяснить сейчас.
Профессор Энтони — М-р Президент и Джентльмены: обо мне упомянули, что я имел определенное дело с этими видами моторов. Я очень рад, что могу добавить свои показания к тому, что М-р Тесла уже сообщил нам относительно их работы, и я признаюсь, когда я первый раз наблюдал их действие, оно показалось мне чрезвычайно примечательным. После моего первого визита в мастерские М-ра Теслы, некоторые моторы, я думаю, именно эти два, которые вы видите на столе, перенесли ко мне, чтобы я провел некоторые испытания их эффективности, и это вероятно вас заинтересует в данном вопросе больше всего остального, что я мог бы сказать. Извиняюсь, но я не принес с собой точные цифры, которые мы получили, но могу привести некоторые из результатов по памяти. Этот небольшой мотор, который вы видите, давал у нас около половины лошадиной силы, и давал эффективность немного больше пятидесяти процентов, что я счел очень хорошей эффективностью для мотора такого размера, поскольку мы не можем ожидать получить на таких маленьких моторах ту же эффективность, как па больших. Это, я уверен, якорь, который М-р Тесла называет якорем для высокого вращательного усилия. Этот маленький шкив, который всего около трех дюймов в диаметре, тянет что-то около пятидесяти фунтов, насколько я помню, при включении тока, так что как видите, вращательное усилие весьма значительное, и это также проявляется в быстроте, с которой якорь меняет разворачивает свое движение при обращении отношения двух токов, которые проходят через две противоположные обмотки. Это можно сделать переместив два провода, или просто передвинув реверсивный переключатель в одной из цепей, и якорь остановится и начнет двигаться в обратную сторону так быстро, что почти невозможно сказать, когда же. разворот произошел. Это показывает, насколько значительное вращательное усилие демонстрирует этот якорь. Этот мотор (имеется в виду второй экземпляр) давал у нас, я думаю, около 1 3/4 л. с, и показал еще большую эффективность, чем другой — чуть-чуть больше шестидесяти процентов. Он работает, с якорем, сконструированным как здесь, почти со скоростью генератора даже под очень тяжелой нагрузкой. Когда нагрузку доводили до максимальной, где эффективность начинает несколько спадать, скорость вращения уменьшалась. Насколько я сейчас помню, она уменьшалась примерно до двадцати восьми тысяч, и видите, под большой нагрузкой скорость сохранялась очень близкой к скорости генератора.
Я мало что могу добавить к тому, что М-р Тесла уже сообщил вам относительно этих моторов. Я нисколько не сомневаюсь, что всем из вам было бы очень интересно, как мне когда-то, посмотреть, как они работают. Это в самом деле лучший способ определить, что дадут моторы.
М-р Тесла — М-р Президент и Джентльмены: Профессор Энтони только что сделал замечание, что скорость этого мотора падала когда нагрузку увеличивали. Это было обусловлено тем фактом, что этот якорь был сделан так, чтобы обеспечивать хорошее усилие со старта. Но если мы сделаем якорь, который предназначается только для синхронности, скорость всегда будет одной и той же, не важно при какой нагрузке; будет только тот недостаток, что на старте вращающее усилие будет настолько маленьким, что он может и не запуститься. Он обычно запускается, если его поставить в нужное положение, но если в его в нужное положение не ставить, он может не стартовать. Если мы используем якорь, состоящий из выточенного из стальной болванки, с обмоткой, он будет сохранять свою скорость при всех нагрузках. Важность поддержания интенсивности полюсов постоянной в том, что если этого добиться, то мы можем использовать, вместо подразделенного якоря, обычную стальную болванку с тем же результатом. Желательно только закрыть магнитное поле. Вы легко можете видеть, когда полюса фиксированы, что не нужно подразделять якорь, если интенсивность силы постоянно поддерживается одинаковой. Но если интенсивность силы не поддерживается постоянно одинаковой, то нужно подразделять, и в целом в полученных мною результатах я обнаружил, что нужно подразделять. Я также нахожу, что результаты, полученные в испытаниях Профессора Энтони, были превосходны. Я отношу это на тот факт, что у динамо было мощное поле и маленький якорь, и поле было очень концентрированным, и возможно по этой причине результат был близок к теоретическому.
Профессор ТOMПCOH — меня очень заинтересовало описание, которое М-р Тесла дал своему новому и замечательному маленькому мотору. Я, если вам будет интересно узнать, работал примерно в тех же направлениях и в сторону тех же целей. В испытаниях, кот
Дата добавления: 2016-11-04; просмотров: 1398;
Поиск по сайту
Узнать еще
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- D) Система класифікації за підтримкою багато гілкового виконання програми.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
