Общие понятия и определения
Первичные ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ
Процесс управления автоматическими системами неразрывно связан с получением информации о состоянии объекта управления. Получение информации осуществляется с помощью измерительных преобразователей и датчиков. Измерительным преобразователем (ИП) в соответствии с РМД29-99 называется техническое средство с нормированными метрологическими характеристиками, служащее для преобразования измеряемой величины в другую величину или измерительный сигнал, удобный для обработки, хранения, дальнейших преобразований, индикации или передачи. ИП или входит в состав какого-либо измерительного прибора, или применяется вместе с каким-либо средством измерений.
Обычно необходимое преобразование осуществляется с помощью совокупности нескольких ИП, соединенных между собой определенным образом. Измеряемая физическая величина поступает на вход первого ИП, который называется первичным измерительным преобразователем (ПИП). Выходная величина ПИП подается на вход последующего ИП, который называется промежуточным. Преобразование измеряемой величины происходит до тех пор, пока с выхода последнего ИП, называемого выходным, не будет получена выходная величина, удобная для дальнейшей обработки, дистанционной передачи или непосредственного восприятия наблюдателем.
Датчиком автоматической системы управления, контроля или измерения называется конструктивно обособленная совокупность ряда измерительных преобразователей, размещенная непосредственно у объекта управления и служащая для преобразования измеряемой величины в выходной сигнал, предназначенный для дистанционной передачи, хранения и непосредственного восприятия наблюдателем.
В ходе многократных преобразований измеряемые величины меняют свой вид, форму и мощность. В измерительных системах в результате последнего преобразования измеряемые величины представляют собой нормированные электрические сигналы в форме аналогового (непрерывного) сигнала, цифрового (кодового) сигнала или логического сигнала. Нормирование выходного электрического сигнала необходимо для того, чтобы обеспечить электрическую и информативную совместимость разных устройств.
Аналоговые сигналы постоянного напряжения и тока унифицированы по диапазону изменения и допустимому значению нагрузки. В России действует ГОСТ 26.011-80 «Средства измерений и автоматизации. Сигналы тока и напряжения электрические непрерывные входные и выходные». Стандарт разрешает использовать (в СИА для агрегатных комплексов) следующие сигналы:
| Сигналы постоянного напряжения | Сигналы постоянного тока | ||
| Диапазон, В | Сопротивление нагрузки, не менее, Ом | Диапазон, мА | Сопротивление нагрузки, не более, Ом (в скобках – для СИА на ИМС) |
| 0…5 | 0…5 | 2500 (2000) | |
| 1…5 | –5…+5 | 2500 (2000) | |
| 0…10 | 0…20 | 1000 (500) | |
| –10…+10 | 4…20 | 1000 (500) |
Датчики, имеющие на выходе напряжение, должны обеспечивать неизменный выходной сигнал при изменении нагрузки от холостого хода до указанной, выполняя роль идеального источника напряжения. Датчики, имеющие на выходе ток, должны сохранять неизменной силу тока при изменении сопротивления нагрузки от 0 до указанного значения, выполняя роль идеального источника тока. И те и другие преобразователи позволяют подключать множество нагрузок, в первом случае параллельно, а во втором – последовательно.
В цифровом выходном сигнале измерительная информация зашифрована с помощью кода. Позиционный сигнал является простейшим видом передачи измерительной информации, в котором измеряемый параметр сравнивается с заданным фиксированным значением – пределом (уставкой), а результат преобразования имеет два значения: "больше" или "меньше". Сигнал этого вида широко используется для сообщения о различных состояниях объекта или процесса, а также для логической обработки и позиционного регулирования.
Математическое описание функциональной связи между измеряемой х и выходной у величинами называется статической характеристикой:
y = f(x). (2.1)
| (4.1) |
Отношение значения выходной величины к соответствующему значению измеряемой величины называется коэффициентом преобразования: k = y/x.
Чувствительностью ИП или датчика называется предел отношения приращений выходной и измеряемой величин:
 (2.2)
(2.2)
В случае нелинейной статической характеристики чувствительность является функцией измеряемой величины. В случае линейной статической характеристики чувствительность является постоянной величиной. У ИП и датчиков с линейной статической характеристикой чувствительность и коэффициент преобразования равны.
2.2. Потенциометрические преобразователи
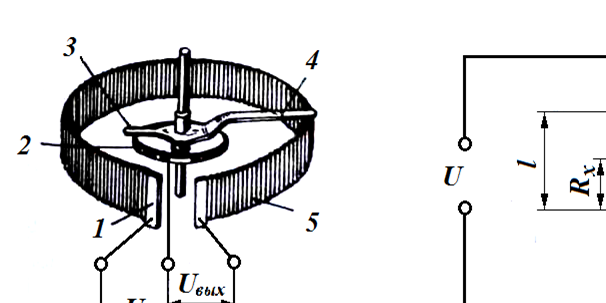
Потенциометрические преобразователи служат для преобразования углового или линейного перемещений в электрический сигнал. Наибольшее применение нашли проволочные потенциометрические преобразователи с непрерывной намоткой. Преобразователь (рис. 2.1, а) имеет каркас 1, выполненный из листового изоляционного материала. На каркас в один слой наматывается изолированный провод 5. В преобразователях часто применяется провод из манганина, нихрома или фехраля. В ответственных случаях используется провод из различных сплавов платины, обладающих высокой износоустойчивостью и повышенной коррозийной стойкостью.
По очищенной от изоляции контактной дорожке обмотки перемещается движок 4, выполненный в виде упругой пластины из серебра или фосфористой бронзы, либо в виде двух-трех проволок из платины. Движок соединен щеткой 3 с токосъемным кольцом 2.
Схема включения простейшего преобразователя показана на рис. 2.1, б. Входной величиной преобразователя является угловое перемещение движка относительно начала обмотки потенциометра (линейное перемещение можно измерять, если его преобразовать в угловое, или если намотка выполнена на прямолинейном каркасе). Выходное напряжение в режиме холостого хода (Rн = ∞)
Uвых = URx/R, (2.3)
где U – напряжение питания преобразователя; R – полное сопротивление преобразователя; Rх – сопротивление, соответствующее перемещению х движка.
При равномерной намотке Rх пропорционально перемещению: Rх = Rx/l (l – длина обмотки). Тогда
Uвых = Ux/l. (2.4)
Видно, что на холостом ходу статическая характеристика преобразователя – прямая, проходящая через начало координат.
При включении нагрузки происходит искажение формы статической характеристики. Исследование влияния нагрузки будет выполнено на ЛР.
Статическая характеристика реальных потенциометрических преобразователей имеет ступенчатый характер. При перемещении движка преобразователя он последовательно переходит с одного витка провода на другой. Так как сопротивление витка имеет конечное значение, то перемещение движка вызывает скачкообразное изменение выходного напряжения. Относительная ошибка ступенчатости зависит от числа витков w обмотки преобразователя.
Если за идеальную характеристику принять прямую, проходящую через середины ступенек, то ошибку ступенчатости следует определять из выражения
 (2.5)
(2.5)
Для уменьшения ошибки ступенчатости увеличивают число витков до 1–2 тыс., уменьшая диаметр провода до 0,03 мм.
Рассмотренный преобразователь позволяет измерять перемещение только одного знака. На рис. 2.2, а показана схема простейшего реверсивного потенциометрического преобразователя. Такой преобразователь имеет отвод от средней точки обмотки, от которой происходит отсчет перемещения движка. В режиме холостого хода выходное напряжение определяется выражением (2.1), в котором х изменяется в пределах – l/2 < х < l/2.
При изменении направления перемещения движка от средней точки обмотки происходит изменение знака выходного напряжения.
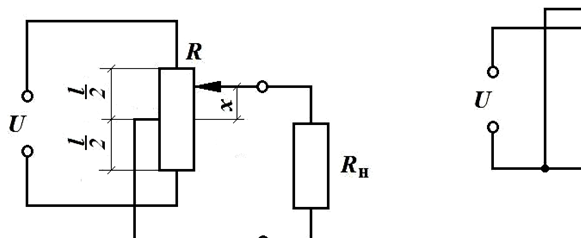 |
На рис. 2.1, б показан мостовой реверсивный преобразователь, состоящий из двух нереверсивных. Выходной сигнал преобразователя снимается между двумя движками, которые перемещаются одновременно. Подключение потенциометров таково, что изменение потенциалов при перемещении имеет разные знаки.
Выходное напряжение при Rн = ∞
Uвых = 2Ux/l. (2.6)
Таким образом, чувствительность мостового преобразователя в два раза больше чувствительности простейшего реверсивного преобразователя.
Динамические характеристики преобразователя зависят от рода нагрузки. Почти всегда нагрузкой является активное сопротивление, тогда преобразователь представляет собой безынерционное (пропорциональное) звено.
Достоинствами потенциометрического преобразователя являются малые масса и габариты, сравнительная простота конструкции, возможность питания от источника как постоянного, так и переменного тока. Основной недостаток – наличие скользящего контакта, который обусловливает низкую надежность преобразователя. Недостатком является также сильное влияние нагрузки.
Потенциометрические преобразователи нашли применение в датчиках давления, авторулевых, подруливающих устройствах.
Дата добавления: 2021-02-19; просмотров: 788;
Поиск по сайту
Узнать еще
- F84 Общие расстройства развития
- I. Математические понятия
- II. Базовые понятия музыкальной акустики
- III. Библиографическое описание документа. Общие требования и правила. ГОСТ 7.1-84
- IV. Направленность ППФП (общие и специальные требования)
- U-Pb метод определения возраста по циркону
- XXVII. ОБЩИЕ ХАРАКТЕРИСТИКИ ГРИБОВ
- А) Общие определения

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
