Расчет мощности привода и построение нагрузочной диаграммы технологических машин. Выбор типа электродвигателя
Методы определения усилий, возникающих при работе, и потребной мощности для привода изложены в литературных источниках:
· подъемно-транспортных машин [4, 9, 13, 14, 16];
· промышленных транспортеров [4, 5, 6, 8, 10, 19];
· машин подсобных предприятий [3, 4, 5, 6, 15];
· насосных и вентиляционных установок [3, 4, 5, 6, 13].
Мощность электропривода вентилятора.Мощность электропривода вентилятора определяется из выражения:
 (2.2.1)
(2.2.1)
где Q – производительность м3/с; H – полный напор, ηП – КПД передачи; ηВ – КПД вентилятора (ηВ =0,4 – 0,6 – для крупных, 0,1 – 0,2 – для мелких); KЗ – 1,1–1,5 – коэффициент запаса при работе с трубопроводом (большие значения относятся к малым мощностям).
Производительность одного вентилятора оценивается после определения общего количества воздуха, необходимого для его подачи в помещение:
 (2.2.2)
(2.2.2)
где L – расчетное количество воздуха для технологического процесса; n – число выбранных вентиляторов.
Количество воздуха, L, подаваемое в помещение, где находятся люди или животные, определяется по известным методикам на основании расчетов, связанных с удалением избыточной влаги, углекислоты и тепла.
1. Если данные для выполнения этих расчетов отсутствуют, можно рассчитывать потребный расход воздуха на основании данных допустимой кратности обмена воздуха в помещении:

где К = 4 – 15 – кратность воздухообмена для животноводческих помещений в зависимости от температуры наружного воздуха, 1/ч; θ – объем помещения, м3.
2. Способ определения потребного количества воздуха, необходимого для подачи его в помещение, связанный с предельно допустимыми скоростями движения воздуха внутри помещения:

где V – допустимое значение скорости воздуха (V =0,1 – 0,5 м/с – для животноводческих помещений; V = 0,5 – 1,0 м/с – для хранилищ зерна, овощей, фруктов; V = 0,15 – 0,3 м/с – для тепличных помещений; S – активное сечение помещения, м2.
В последнем случае необходимо знать размеры помещения и размеры технологического оборудования, уменьшающего активные объем и сечение помещения.
Для животноводческих помещений расход воздуха может быть определен и на основании вентиляционной нормы на 1 голову:

где q – вентиляционная норма, м/ч; N – количество животных.
Выбранный вентилятор должен обеспечивать полный напор:

Динамическая составляющая напора вентилятора определяется:

где ρ – плотность воздуха, кг/м3 (ρ=1,26 при температуре 20°С); V – скорость воздуха в воздуховоде вентилятора, м/с (Vдоп≤ 20 м/с).
Статическая составляющая напора вентилятора оделяется по формуле

где l – длина воздуховода, м; R – сопротивление воздуховода, 1/м; Σξ – потери в местных сопротивлениях.
Таким образом, определение необходимого напора вентиляционной установки требует знания технологической схемы вентиляции помещения, размеров вентиляционных шахт, диаметров и длин воздуховодов.
Мощность привода насоса.Водоснабжение производственных участков, населенных пунктов и т.д. связано с выбором технологической схемы подачи воды. Для предварительной оценки мощности привода насоса используют формулу

где Q – расход воды, обеспечиваемый насосом, м3/c; Н – напор насоса, Н/м; ηн – КПД насоса (ηн = 0,4–0,8); ηп – КПД передачи (для прямой ηп=1, для различного вида передачи ηн = 0,95 – 0,97); КЗ – 1,05 –1,1 – коэффициент запаса (большая величина для малых насосов).
Для водоснабжения объекта производительность насоса определяется:

где Qмакс.ч. – максимальный часовой расход воды, м3/с; Кч – коэффициент неравномерности часового расхода (Кч=1,5 – 3); Ксут – коэффициент неравномерности суточного расхода (Ксут – 1,1–1,3); η – КПД, учитывающий потери воды (η = 0,9); Qср.сут – среднесуточный расход воды, Qср.сут= Σqini; qi – норма на одного потребителя; ni– количество потребителей.
Величину нормы подачи (гидромодуль) вычисляют по формуле

где α = Fi / Σ Fi ; Fi – площадь заполнения водой; Nп – норма воды, м3/га; t – период подачи, сут.; τ – продолжительность подачи воды в сутки, ч/сут.
При выборе насоса по каталогу может оказаться невозможным обеспечение подачи данного количества воды, тогда выбирают несколько насосов, обеспечивающих потребную подачу воды. Основополагающим параметром при выборе насоса является величина напора, которую он должен обеспечить при подаче воды в самую удаленную точку технологической схемы.
В общем случае напор определяется из формулы

где Нвс – высота всасывания; Ннагн – высота нагнетания; Нп – потери в трубопроводе и на местных сопротивлениях (повороты, вентили, задвижки); Нвых – свободный напор, обеспечивающий определенную скорость вытекания воды из трубы; Нвыкл – напор, соответствующий избыточному давлению выключения в напорных котлах.
Чтобы использовать формулу для расчета мощности привода, надо представить её в виде

где γ – плотность воды, кг/м3; Н – полный напор, м.
При выборе насоса по универсальной характеристике уточняют его производительность и коэффициент полезного действия для данного расчетного значения напора.
Мощность привода подъемно-транспортных машин.Подъемно- транспортные машины отличаются чрезвычайно большим разнообразием по своим технологическим характеристикам. Расчет мощности привода всех этих машин определяется по формуле

где F – суммарное усилие, необходимое на преодоление сил сопротивления движению, Н; υ – линейная скорость, м/с; ηп – КПД передачи.
Если скорости движения каждой машины задаются соответствующими рекомендациями, то расчет усилий в системе привода является подчас достаточно сложной задачей.
Мощность привода подъемных механизмов (тельферов) определяется:

где mo – масса крюка и полиспаста, кг; mг – масса груза, кг; υПОД – скорость подъема, м/с;
Необходимо отметить, что мощность электрического двигателя определяется с учетом режима работы механизма.
Расчет мощности привода механизма передвижения тельфера.Расчет мощности привода механизма передвижения тельфера по балке и механизма передвижения кран-балки вдоль цеха производится по формуле

где fоб – обобщенный коэффициент сопротивления движению; υпер – скорость перемещения, м/с; ηп – КПД передачи; mТ – масса тележки и балки, кг.
Обобщенный коэффициент сопротивления определяется по формуле

где К – коэффициент сопротивления, учитывающий трение реборд колес о рельсы (К= 1,5 – 2,5); μ – коэффициент трения качения(μ=0,015) или трения скольжения (μ=0,15) в зависимости от вида подшипника; r – радиус шейки оси колеса, м; f0 – коэффициент трения качения ходового колеса по рельсу М (f0=0,0003 м для колес Rхк≤150 мм); Rхк – радиус ходового колеса.
Расчет мощности привода электровозов.В производстве используется множество видов транспортных самоходных тележек (электровозов), на базе которых выполнены кормораздатчики различного типа. Движение колес этих тележек осуществляется по дорогам разного типа, причем движение может быть с подъемом и по криволинейному пути. С учетом этих условий расчет мощности привода выполняется по формуле

где F0 – тяговое сопротивление на прямолинейном горизонтальном пути, Н; Fкр – тяговое сопротивление на закруглениях пути, Н; Fi – дополнительное тяговое сопротивление на подъеме, Н; υ – скорость движения транспортной тележки, м/с; ηп – КПД передачи.
При прямолинейном движении по горизонтальному участку пути основное сопротивление зависит от трения качения колес в точке их соприкосновения с поверхностью дороги, трения реборд колес о рельсы, трения в осях колес, от конструкции ходовых колес и скорости движения:

где f0 – коэффициент сопротивления передвижения транспорта на прямолинейном горизонтальном участке пути, Н/кг; m – масса транспортной тележки с грузом, кг.
Величина коэффициента сопротивления для условий внутриусадебных дорог находится в пределах f0=0,1– 0,2 Н/кг;
Дополнительное сопротивление движению на криволинейных участках:

где fкр – коэффициент дополнительного сопротивления на закруглении пути, Н/кг.
Для вагонеток с диаметром ходовых колес 100 мм дополнительное сопротивление определяется по формуле

где R – радиус закругления дороги, м.
Дополнительное сопротивление на подъеме определяется по формуле:

где α – угол подъема дороги.
Рекомендуемые скорости передвижения транспортных тележек: V=0,3  1,5 м/с.
1,5 м/с.
Тяговое усилие при трогании тележек:

где fтр= 0,17 0,35 Н/кг.
Использование вакуум-насосов в промышленных установкахИспользование вакуум-насосов в промышленных установках определяет их производительность, связанную с числом всасывающих аппаратов:

где n – число всасывающих аппаратов в установке; q – расход воздуха одним всасывающим аппаратом (q≈1,8 м/ч); k = 2  3 – коэффициент, учитывающий неполную герметизацию системы.
3 – коэффициент, учитывающий неполную герметизацию системы.
Расчетная мощность привода вакуум-насоса.Расчетная мощность привода вакуум-насоса определяется по формуле

где Н – вакуум, развиваемый насосом, Па; ηп – КПД передачи; ηн=0,2 0,25 – КПД вакуум-насоса. Величина давления вакуума, соответствующая нормальной работе установки, равна Н = 400 мм.рт.ст.
Мощность привода электролебедки.Предварительную оценку мощности привода электролебедки дают по условию:

где Кз = 1,1–1,3 – коэффициент запаса; P1 и Р2 – мощности, необходимые для начала и в конце хода.
Изменение величины мощности в процессе движения груза связано с тем, что трос лебедки, наматываясь на барабан в несколько рядов, меняет радиус намотки. При этом линейная скорость движения троса является величиной переменной при относительно мало меняющейся угловой частоте вращения барабана:

где ωб – угловая частота вращения барабана, с–1; R – радиус намотки троса на барабан, м.
Мощность в начале движения груза:

где Vнач = ωбRнач, м/с; ηл – КПД лебедки с передачей.
Сопротивление от волочения троса о почву:
 , (2. 2.29)
, (2. 2.29)
где КT – коэффициент, учитывающий условия работы (для равнины – КT =1, для горной местности КT = 3); TT – удельная масса троса (TT = 3 кг/м); l – длина той части троса, которая движется по земле (составляет 80 % длины гона); f=0,35 – коэффициент трения троса о почву.
Мощность в конце движения груза равна

где Vкон = ωбRкон, м/с; ηл – КПД лебедки с передачей.
Тяговое сопротивление в начале движения в начале Fп.нач и в конце движения Fп.кон груза определяется по формуле:

где f=0,2– 0,4 – коэффициент трения; mГ – масса груза, кг; k = 4 – 8,5 Н/см2 – удельное сопротивление материала; а – глубина вспашки, см; b – ширина захвата плуга, см; ε = 0,1– 0,3 – коэффициент, учитывающий влияние скоростей.
Лебедки должны перемещаться вдоль участка и иметь необходимую мощность привода:

где mл – масса лебедки, кг; Vл – скорость передвижения лебедки, м/с; ηп-1 – КПД передачи.
Нагрузочные диаграммы. Нагрузочные диаграммы представляют собой зависимости момента сопротивления на валу электродвигателя или рабочей машины, мощности или тока электродвигателя от времени, т.е. Мс(t), Р(t), I(t). Нагрузочные диаграммы могут быть получены экспериментально или рассчитаны аналитически.
Метод обработки нагрузочных диаграмм зависит от характера кривых Р(t), I(t), Mc(t). Кривая Р(t), изображенная на рис. 2.4, аппроксимируется отрезками прямых. Аппроксимирующая прямая проводится таким образом, чтобы площадь под кривой мощности и под аппроксимирующей прямой были одинаковыми. При этом максимальная разность между ординатами кривой мощности и аппроксимирующей прямой не должна превышать половины среднего значения ординат прямой.
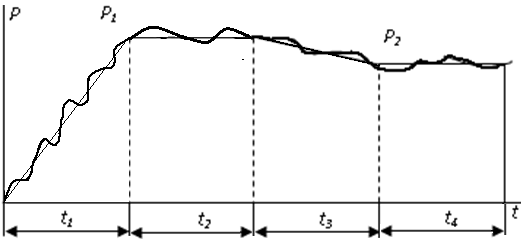
Рис. 2.4. Фактическая и аппроксимирующая ступенчатая
нагрузочные диаграммы электродвигателя
Эквивалентная мощность Рэ, кВт определяется по нагрузочной диаграмме по формуле
 , (2. 2.33)
, (2. 2.33)
где Т – период действия нагрузки; Р(t) – зависимость мощности от времени за расчётный период Т.
В конкретном случае (рис. 2.7) эквивалентная мощность определяется по формуле
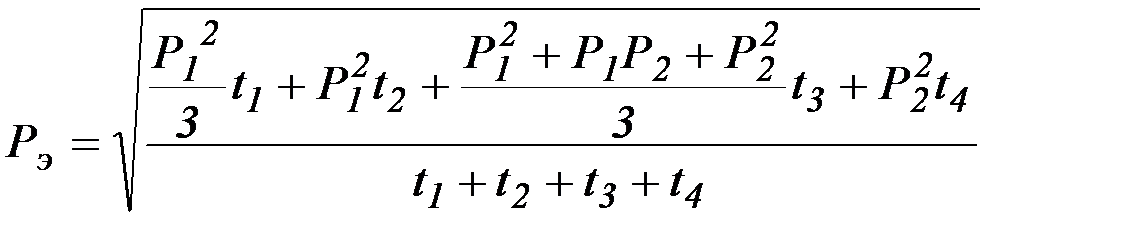 , (2.2.34)
, (2.2.34)
При случайном характере нагрузки нагрузочная диаграмма обрабатывается методами теории вероятности. На диаграмме определяется приближенное значение частоты, с которой изменяется нагрузка и период изменения нагрузки Тп в секундах.
Длительность участка диаграммы, подлежащего обработке, принимается равной

Интервал выборки:
 . (2.2.36)
. (2.2.36)
Для определения расчётных данных минимальный объем выборки определяется по формуле

Основными характеристиками нагрузочных диаграмм (формулы приведены для зависимости Р(t)) являются:
– математическое ожидание:

где Рi – текущее значение мощности, кВт;
– среднеквадратическое отклонение:

Зная эти характеристики, определяют эквивалентную мощность, ток или момент по формуле
 . (2. 2.40)
. (2. 2.40)
Мощность для привода рабочей машины Р, кВт определяется с учетом КПД электродвигателя, ηд, т.е. по формуле
 (2.2.41)
(2.2.41)
Выбор типа электродвигателя.Выбор электродвигателя производится по роду тока и значению напряжения, электрическим модификациям, конструктивному исполнению, степени защищенности от воздействия окружающей среды, мощности и частоте вращения.
При выборе электродвигателя по роду тока и значению напряжения учитываются данные источника питания и технологические требования со стороны производственного процесса электрифицированной установки. При необходимости плавного регулирования угловой скорости электропривода в широком диапазоне предпочтение отдается электродвигателям постоянного тока. Для электропривода производственных машин и агрегатов, как правило, применяются асинхронные электродвигатели трёхфазного переменного тока напряжением 380/220 В мощностью до 75 кВт.
По конструктивному исполнению и способу монтажа электродвигатели выбираются исходя из удобства их установки и дальнейшего обслуживания с учетом конструктивных особенностей рабочей машины или механизма.
Климатическое исполнение и категория размещения должны соответствовать условиям окружающей среды. Для объектов промышленного производства целесообразно выбирать электродвигатели специализированного исполнения влагоморозостойкого, химического, пылевлагозащищенного, и другие со степенью защищенности IP24 – IP54.
Мощность электродвигателя должна быть достаточной для преодоления сопротивления рабочей машины в заданном режиме ее работы без превышения допустимой температуры частей двигателя. При этом напряжение питания электродвигателя может быть ниже номинального на 10 %. При выборе электродвигателя нужно стремиться к максимальному использованию его мощности во время работы. Коэффициент загрузки должен быть не ниже 0,7. Для повышения коэффициента загрузки при случайном характере нагрузки рекомендуется обеспечивать механическое выравнивание подачи материала либо автоматическое регулирование загрузки. Недогрузка электродвигателя ведет к снижению КПД, cosj, значительному перерасходу электроэнергии, удорожанию установки, перегрузка – к перегреву и быстрому выходу из строя.
Методика выбора мощности электродвигателя зависит от характера нагрузки (постоянная, переменная, случайная) и режима работы (длительный, кратковременный, повторно-кратковременный и т.д.).
Для машин, работающих с длительной постоянной нагрузкой, мощность определяется на основании соотношения Рн ³ Р.
По каталогу выбирается двигатель, ближайший по стандартной шкале. Выбранный двигатель проверяется по условиям пуска.
Если нагрузка переменная, то электродвигатель выбирается так, чтобы выполнялось условие Рн ³ Рэ.
Метод эквивалентных величин используют для предварительного определения мощности электродвигателя по нагреву. Окончательно правильность выбора мощности электродвигателя уточняют методом средних потерь путем сравнения его номинальных (допускаемых) потерь мощности DРн со средними DРср потерями, т.е.:

где DРi, ti – потери мощности и продолжительность нагрузки электродвигателя на i-м участке нагрузочной диаграммы.
Номинальные потери мощности DРн, кВт, рассчитываются по формуле на основании паспортных данных электродвигателя, частичные – на участках нагрузочной диаграммы по соотношению:

где hi – КПД электродвигателя при Рi нагрузке на валу.
Если в каталоге в технических данных электродвигателей не приводятся значения hi при равных коэффициентах загрузки, то они определяются по формуле

где kз – коэффициент загрузки, kз= Pi / P; fa – коэффициент формы кривой КПД.

где ηн – КПД электродвигателя при номинальной мощности, о.е.; sн – номинальное скольжение электродвигателя.
Выбранный электродвигатель проверяется по условиям пуска, перегрузочной способности и по нагреву.
При кратковременном режиме работы электродвигателя мощность предварительно выбирается по эквивалентному значению, определенному по нагрузочной диаграмме. Электродвигатель выбирается по каталогам на электродвигатели, работающие при кратковременном режиме с периодами действия номинальной нагрузки 10, 30, 60 и 90 мин. Если период действия номинальной нагрузки не соответствует каталожному значению, то производится пересчет мощности электродвигателя с учетом равенства потерь энергии за период работы по формуле
 2.46)
2.46)
где tp – продолжительность работы с эквивалентной нагрузкой (Рэ), мин; tст – стандартная продолжительность работы, мин.
Допускается применение электродвигателей, рассчитанных на длительный режим работы. В этом случае мощность электродвигателя определяется с учетом коэффициентов тепловой и механической перегрузки.
Коэффициент тепловой перегрузки определяется по формуле:

где tр – время работы, мин; Тн – постоянная времени нагрева электродвигателя, мин, предварительно принимается равной 20 мин.
Коэффициент механической перегрузки электродвигателя:
 , (2.2.48)
, (2.2.48)
где α – коэффициент потерь, α = (0,5 – 0,7).
Расчетная мощность Рр, кВт, электродвигателя определяется по формуле

где номинальная – из условия Рн ³ Рр.
Выбранный электродвигатель проверяется по условиям пуска и перегрузочной способности и по нагреву с учётом продолжительности времени пуска. При работе в повторно-кратковременном режиме определяется среднеквадратичная мощность за рабочий период Рэ по нагрузочной диаграмме.
Выбор мощности электродвигателя осуществляется с учетом стандартной продолжительности включения ПВСТ.
Фактическая продолжительность включения электродвигателя ПВф,%:
 (2. 2.50)
(2. 2.50)
где to – время паузы, мин.
Если ПВФ отличается от стандартных значений 15, 25, 40 и 60 %, то производится пересчет мощности:
 (2. 2.51)
(2. 2.51)
Номинальная мощность электродвигателя выбирается по условию:
 . (2. 2.52)
. (2. 2.52)
При использовании электродвигателей длительного режима их мощность определяется по среднеквадратичной мощности за рабочий цикл или по среднеквадратичной мощности за рабочий период с учетом коэффициента механической перегрузки:
а) по среднеквадратической мощности за рабочий цикл:
 (2. 2.53)
(2. 2.53)
где β0 – коэффициент, учитывающий ухудшение теплоотдачи электродвигателя в отключенном состоянии, β0 = 0,5.
 , (2. 2.54)
, (2. 2.54)
б) по среднеквадратической мощности за рабочий период:
 (2. 2.55)
(2. 2.55)
Коэффициент механической перегрузки рассчитывается по формуле
 (2.2.56)
(2.2.56)
Коэффициент тепловой перегрузки при работе электродвигателя в данном режиме находится по формулам:
 (2. 2.57)
(2. 2.57)

Выбранный электродвигатель проверяется по условиям пуска, перегрузочной способности и по нагреву.
Электродвигатели одинаковой мощности, но большей частоты вращения имеют меньшие габариты, вес и дешевле, поэтому желательно применение более быстроходных двигателей. Однако возрастание частоты вращения электродвигателя связано с увеличением передаточного числа, веса и габаритов передачи или редуктора, что приводит к удорожанию электропривода. Для приводов с редкими пусками наиболее целесообразным будет такое передаточное число, при котором стоимость электродвигателя и редуктора (электропривода) окажется наименьшей.
Для приводов с частыми пусками существенное значение имеет сокращение времени пуска и торможения, так как при этом уменьшается длительность цикла работы машины и увеличивается ее производительность.
Для всех электродвигателей принятого типа и необходимой мощности рассчитывается произведение Jд2i2 и выбирается тот двигатель, для которого это произведение окажется наименьшим, см. Прил. А.
Дата добавления: 2021-01-26; просмотров: 1580;
Поиск по сайту
Узнать еще
- D - триггер типа «защелка»
- E) Расчет структурных составляющих очага деформации с одним нейтральным сечением
- F. Построение диаграмм сумм рангов
- I. Погрешности механической обработки. Точность обработки. Методы их расчёта
- IV. Выбор способа ориентации изображения.
- IV. Выбор способа формирования фонда капитального ремонта
- IV. РАСЧЕТ РЕКТИФИКАЦИОННЫХ КОЛОНН
- Tермодинамические диаграммы

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
