Формальное описание работы устройства
Описание работы программы по формальным принципам, позволяет за счет формального преобразования составить ориентированный граф переходов, описывающий поведение объекта.
Автоматное программирование представляет собой постройку и функционирование управляющей программы в виде конечного автомата, который может находиться в каждый момент времени только в одном из N состояний. При этом в каждом цикле для текущего состояния (иначе ШАГА программы) вычисляются логические условия, позволяющие изменить состояние программы. Такой подход однозначно определяет поведение программы в каждом цикле по отношению к объекту управления – обеспечивает ее детерминированность. Основное достоинство этого подхода, что искомая программа строится по формальным правилам.
Вершины графа соответствуют состояниям схемы, дуги ‒ переходам между ними. Для формального описания внутренних состояний автомата вводят конечное число абстрактных вторичных переменных, что позволяет поставить в соответствие каждому состоянию автомата их различные комбинации. Присвоение вершинам графа вторичных переменных называют кодированием графа. Для предупреждения возникновения гонок, следует воспользоваться методом противогоночного кодирования, т.е. соседним состояниям присваиваются соседние коды и на каждом переходе автомата меняет свое состояние только одни триггер.
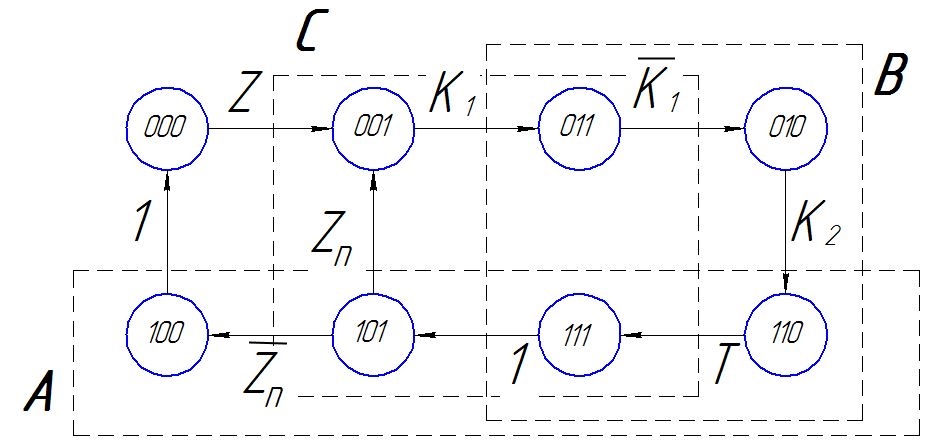
Рис. 10.3. Граф переходов
В исходном состоянии все исполнительные устройства выключены, вторичные переменные равны 0 (000).
При поступлении сигнала "Z" происходит переход системы в следующее состояние (001), в котором шибер движется в конечное положение «впереди».
После того как шибер дошел до конечного положения «вперед», срабатывает датчик K1.
Сигнал с датчика K1 переводит схему в состояние (011), в котором шибер движется в начальное положение «назад», при этом сигнал с датчика обнуляется.
Как только перестает приходить сигнал с датчика K1 (сигнал  ), из состояния (011), система переходит в состояние (010), при этом включается привод подъема кольца, когда кольцо доходит до верхнего положения, срабатывает датчик K2.
), из состояния (011), система переходит в состояние (010), при этом включается привод подъема кольца, когда кольцо доходит до верхнего положения, срабатывает датчик K2.
При появлении сигнала K2 схема переводится в состояние (110). В этом состоянии включается привод вращения и обдув кольца. Также включается таймер Т на tn секунд.
Сигнал с таймера Т переводит схему в состояние (111), где прекращаются вращение и обдув и кольцо опускается в нижнее положение.
С помощью безусловного сигнала происходит переход из состояния (111) в состояние (101), в котором проверяется наличие сигнала Zn. В случае, если сигнал отсутствует, система, через пустое состояние (100) переходит в исходное состояние (000). В случае присутствия сигнала Zn, система переходит в состояние (001).
Дата добавления: 2021-01-26; просмотров: 611;
Поиск по сайту
Узнать еще
- Cпецифика логопедической работы в остром периоде
- H. Разработка мер по повышению качества работы органа здравоохранения
- II раздел. Организация работы логопеда в группе для детей с ОНР
- II. ПЕРЕФЕРИЙНЫЕ УСТРОЙСТВА
- III. Библиографическое описание документа. Общие требования и правила. ГОСТ 7.1-84
- III. Описание экспериментальной установки и метода измерения
- III. Описание экспериментальной установки и метода измерения
- III. Описание экспериментальной установки и метода измерения

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
