Структура глобальных навигационных спутниковых систем
А. Общие сведения
Глобальная навигационная спутниковая система (ГНСС) предназначена для непрерывного и высокоточного определения координат места различных подвижных объектов, их курса и скорости в любой точке Земли или околоземного пространства, в любое время суток и в любую погоду.
В настоящее время навигационные спутниковые системы нашли самое широкое применение в различных сферах человеческой деятельности, но особое место в силу своих положительных свойств (глобальность, высокая точность, независимость от погодных условий, времени суток и сезона) они нашли на транспорте.
Качественный облик (структура, способы функционирования и эксплуатационные характеристики) ГНСС во многом обусловлены требованиями потребителей к точности навигационного обеспечения и методам навигационных измерений. Для достижения непрерывности определения места судна в любом районе Мирового океана вне зависимости от погоды, сезона и времени суток в составе современных ГНСС второго поколения ГЛОНАСС (РФ) и GPS (США) функционируют три основные подсистемы:
- навигационных космических аппаратов (НКА) – космический сегмент;
- контроля и управления – наземный командно-измерительный комплекс (КИК) или сегмент управления;
- навигационной аппаратуры потребителей (НАП) – судовые приемоиндикаторы (ПИ).
Основной задачей, решаемой ГНСС, является определение пространственных координат местоположения подвижного объекта и времени. Эта задача реализуется путем вычисления искомых навигационных параметров непосредственно в приемоиндикаторе на основе беззапросных (пассивных) дальномерных измерений по сигналам нескольких видимых НКА с известными координатами. Применение беззапросных измерений обеспечили возможность достижения неограниченной пропускной способности ГНСС.
Для определения места судна одновременно принимают данные не менее чем от трех НКА (рис. 23.9). При пересечении линий положения I–I, II–II, III–III может получиться фигура погрешностей (треугольник).
В этом случае вероятнейшее место судна будет находиться в точке пересечения биссектрис вершин (внутренних углов) треугольника погрешности (рис. 23.10).
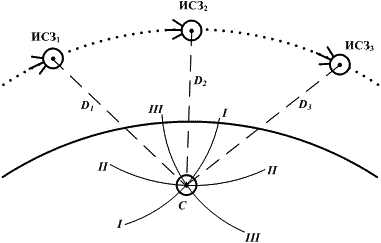
Рис. 23.9. Принцип определения места судна по ГНСС
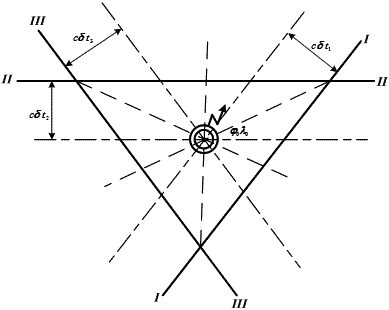
Рис. 23.10. Треугольник погрешностей при определении места судна по ГНСС
Треугольник погрешностей получается из-за присутствия в измеренных расстояниях D1,2,3 постоянных погрешностей сδt. Найдя место судна (φ0 λ0) методом биссектрис можно найти и постоянную погрешность сδt, возникающую из-за расхождения временны´х шкал НКА и ПИ.
Геометрия орбитальной группировки позволяет обеспечивать одновременную радиовидимость в любой точке земного шара и в любое время суток не менее четырех НКА. Все НКА работают в одной полосе частот и передают навигационные сигналы одинаковой структуры, позволяющие в аппаратуре потребителей измерять псевдодальность системы «объект-НКА». Кроме того, измеряется доплеровский сдвиг частоты сигнала НКА, который используется для измерения скорости объекта. Псевдодальности используются для определения координат места и вычисляются путем измерения времени прохождения сигнала на трассе «НКА-объекта».
Наиболее точное определение места обеспечивается при углах между направлениями «НКА-объект» близких к 90°.
Дата добавления: 2021-01-26; просмотров: 699;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- CASE-технология создания информационных систем
- DSM — система классификации Американской психиатрической ассоциации
- F45.38 другие органы или системы
- I Этапы развития САSЕ-систем
- I. Государственный бюджет и его структура. три состояния государственного бюджета.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
