ТЕХНОЛОГИЧЕСКИЕ ПРИНЦИПЫ РЕАЛИЗАЦИИ ОМП В ЛОКАЛЬНЫХ И ЗОНАЛЬНЫХ АСУ ДТП
Задачи ОМП автомобилей, других транспортных средств, ценных грузов крайне актуальны как для государственных правоохранительных органов, так и для частных структур безопасности. Такие задачи приходится решать в процессе управления патрульными службами и контроля перемещения подвижных объектов, обеспечения безопасности автомашин и их поиска в случае угона, сопровождении ТС, ценных грузов и т.д.
В системах автоматического (автоматизированного) определения местоположения транспортного средства — AVL (Automatic Vehicle Location system) местоположение ТС определяется автоматически по мере перемещения его в пределах данной географической зоны. Система AVL обычно состоит из подсистемы ОМП, подсистемы передачи данных и подсистемы управления и обработки данных.
По назначению AVL-системы можно разделить:
на диспетчерские системы, в которых осуществляется централизованный контроль в определенной зоне за местоположением и перемещением ТС в реальном масштабе времени одним или несколькими диспетчерами системы, находящимися в стационарных диспетчерских центрах (это могут быть системы оперативного контроля перемещения патрульных автомашин, контроля подвижных объектов, системы поиска угнанных автомашин);
системы дистанционного сопровождения, в которых производится дистанционный контроль перемещения подвижного объекта с помощью специально оборудованной автомашины или другого ТС; чаще всего такие системы используются при сопровождении ценных грузов или контроле перемещения транспортных средств;
системы восстановления маршрута, решающие задачу определения маршрута или мест пребывания ТС в режиме постобработки на основе полученных тем или иным способом данных; подобные системы применяются при контроле перемещения ТС, а также с целью получения статистических данных о маршрутах.
В состав конкретной AVL-системы часто входят технические средства, обеспечивающие несколько способов определения местоположения.
В зависимости от размера географической зоны, на которой действует AVL-система, она может быть:
локальной, т.е. рассчитанной на малый радиус действия, что характерно н основном для систем дистанционного сопровождения;
зональной, ограниченной, как правило, пределами населенного пункта, области, региона;
глобальной, для которой зона действия составляет территории нескольких государств, материк, территорию всего земного шара.
С точки зрения реализации функций ОМП AVL-системы характеризуются такими техническими параметрами, как точность местоопределения и периодичность уточнения данных. Очевидно, что эти параметры зависят от зоны действия AVL-системы. Чем меньше размер зоны действия, тем выше должна быть точность ОМП. Так, для зональных систем, действующих на территории города, считается достаточной точность ОМП (называемая также зоной неопределенности положения) от 100 до 200 м. Некоторые специальные системы требуют точности в единицы метров, для глобальных систем бывает достаточно точности в несколько километров. Для зональных диспетчерских систем идеальным может считаться получение данных о местоположении подвижного объекта до одного раза в минуту. Системы дистанционного сопровождения требуют большей частоты обновления информации.
Методы ОМП, используемые в AVL-системах, можно разбить на три основных категории: зональные методы, методы навигационного счисления и методы ОМП по радиочастоте. Рассмотрим коротко особенности современных систем ОМП.
1.Методы приближения. С помощью достаточно большого количества контрольных пунктов (КП), точное местоположение которых известно в системе, на территории города создается сеть контрольных зон. Местоположение ТС определяется по мере прохождения им КП. Распознанный индивидуальный код КП передается в бортовую аппаратуру, которая через подсистему передачи данных передает эту информацию, а также свой идентификационный код в подсистему управления и обработки данных. Так реализуется метод прямого приближения. Однако на практике чаше используется инверсный метод приближения — обнаружение и идентификация ТС осуществляется с помощью установленных на них активных, пассивных или полуактивных маломощных радиомаяков, передающих на приемник КП свой индивидуальный код, или же с помощью оптической аппаратуры считывания и распознавания характерных признаков объекта, например, автомобильных номеров. Информация от КП далее передается в подсистему управления и обработки данных.
Очевидно, для зональных систем точность местоопределения и периодичность обновления данных напрямую зависит от плотности расположения КП по территории действия системы. Методы приближения требуют развитой инфраструктурысвязи для организации подсистемы передачи данных с большою числа КП в центр управления и контроля, а в случае использования оптических методов считывания требуют и сложной аппаратуры на КП, и поэтому являются весьма дорогостоящими, особенно при построении систем, охватывающих большие территории. В то же время инверсные методы приближения позволяют минимизировать объемы бортовой аппаратуры или даже вообще не устанавливать ее на автомашину. Основное применение зональных систем — комплексное обеспечение охраны автомашин, обеспечение поиска автомашин при угоне. Примером подобной системы является система КОРЗ-ГАИ, отслеживающая приближение угнанной оборудованной автомашины к посту дорожной инспекции. В Москве предполагалось оснащение подобной аппаратурой всех постов на выезде из города.
2. Методы ОМП по радиочастоте. Местоположение ТС определяется путем измерения разности расстояний от ТС до трех или более радиомаяков. Данную группу методов можно условно разбить на две подгруппы: радиопеленгация, при которой абсолютное или относительное местоположение ТС определяется при приеме излучаемого им радиосигнала сетью стационарных или мобильных приемных пунктов, и вычисление координат по результатам приема специальных радиосигналов на борту подвижного объекта (методы прямой или инверсной радионавигации).
2.1. Методы радиопеленгации.Спомощью распределенной по территории города сети пеленгаторов или с помощью мобильных средств пеленгации возможно отслеживание местоположения ТС, оборудованных радиопередатчиками-маяками.
Примером AVL-системы, основанной на методах радиопеленгации, можно считать систему ГИПС (новое название - СКИФ). Принцип работы системы — прием сигнала, излучаемого малогабаритным радиомаяком на ТС, сетью стационарных радиоприемных центров и вычисление области неопределенности положения ТС. Точность местоопределения зависит от плотности размещения стационарной радиоприемной сети на территории и может составлять несколько метров в режиме непрерывного слежения и корректировки данных с использованием ГИС.
Подобную систему с применением пейджеров двухсторонней связи и сети приемопередающих станций предлагает фирма «Мега Пейдж». Широкополосный передатчик, установленный на автомашине, включается по сигналу стандартного пейджингового приемника, либо по сигналу системы противоугонной сигнализации. ОМП передатчика осуществляется с помощью сети базовых станций пейджинговой системы.
Примером системы на базе мобильных пеленгаторов является система ЛОДЖЕК. Пеленгаторами данной системы оборудованы автомашины спецбатальона дорожно-постовой службы ГАИ и посты-пикеты ГАИ на выезде из города.
2.2. Методы радионавигации. Наилучшие точностные и эксплуатационные характеристики в настоящее время имеют спутниковые навигационные системы (СНС), в которых достигается точность местоопределения в стандартном режиме не менее 50 — 100 м, а с применением специальных методов обработки информационных сигналов в режиме фазовых определений или дифференциальной навигации — несколько метров.
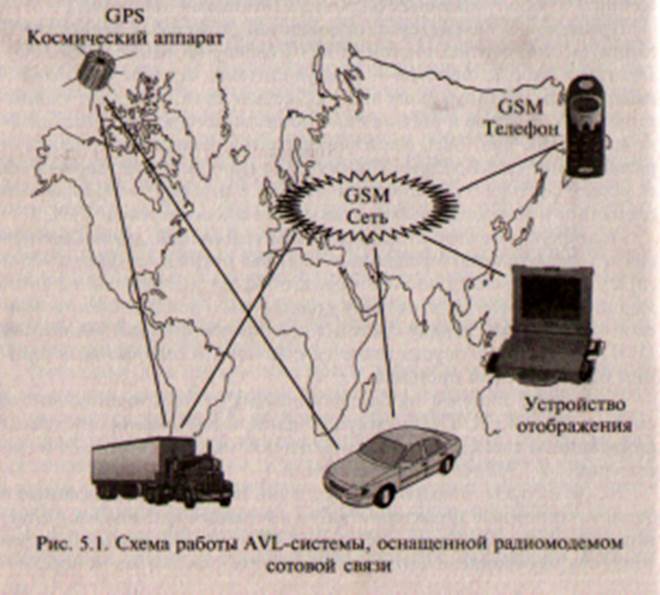
Технические решения, предлагаемые различными фирмами, достаточно близки по своим показателям и различаются деталями, которые, однако, могут оказаться существенными для конкретного пользователя системы. Как правило, оборудование системы включает в себя бортовой навигационный вычислитель, радиостанцию УКВ-радиосвязи или сотовый телефон (рис. 5.1).
В диспетчерском центре устанавливается компьютер с электронной картой и ПО системы диспетчеризации и мониторинга авто транспорта на территории города. В качестве примеров подобных систем можно привести систему «Магеллан» фирмы «Транснетсервис», «Юником-AVL» фирмы «Юником», «Гранит» НТЦ «Сеть», КОРД фирмы «КОРД», GrantGuard группы компаний «ГРАНТ-Вымпел», TrackMastcr Car компании «ГЕО СПЕКТРУМ» и др.
Главной проблемой при внедрении этих систем является недостаточное развитие в России инфраструктуры подвижной связи для организации надежного канала передачи информации между бортовым и центровым оборудованием на территории крупных городов.
Определенный прорыв в этой области можно ожидать с расширением площади покрытия и мощности центров коммутации данных, использующих стандарты цифровой сотовой связи GSM.
3. Методы навигационного счисления. Данные методы ОМП основаны на измерении параметров движения ТС с помощью датчиков ускорений, угловых скоростей, пройденного пути и направления. На основе полученных данных вычисляется текущее местоположение ТС относительно известной начальной точки. В целом данные методы могут использоваться в системах, применяющих методы радионавигации. Основное преимущество методов навигационного счисления — независимость от условий приема навигационных сигналов бортовой аппаратурой. На территории города с плотной застройкой могут встречаться участки, где затруднен прием сигналов от наземных систем и даже СНС. На таких участках
бортовая навигационная аппаратура не в состоянии вычислить координаты подвижного объекта. Приемные антенны радионавигационных систем должны размещаться на ТС с учетом обеспечения наилучших условий приема навигационных сигналов. Это делает их уязвимыми для злоумышленников в случае применения для нужд охраны ТС или перевозимых ими грузов. Существующие методы камуфлирования приемных антенн достаточно сложны и дороги.
Недостатками методов навигационного счисления можно считать необходимость коррекции накапливаемых ошибок измерения параметров движения, достаточно большие габариты бортовой аппаратуры, отсутствие доступной малогабаритной элементной базы для создания бортовой аппаратуры (акселерометров, автономных счислителей пройденного пути, датчиков направления), сложность обработки параметров движения с целью вычисления координат в бортовом вычислителе. Наиболее перспективным направлением применения подобных методов можно считать их совместное использование с радионавигацией, что позволит скомпенсировать недостатки, присущие обоим методам.
Систему ОМП с использованием данного метода предлагает ЗАО «Автонавигатор». В бортовом ТС используются: датчик пути, подключаемый к спидометру автомашины, датчик направления на основе феррозондов, измеряющих отклонение оси автомашины от магнитного меридиана Земли, и датчик ускорения (акселерометр), обеспечивающий устранение ошибок феррозондового датчика, возникающих из-за не горизонтального расположения объекта относительно поверхности Земли. Корректировка ошибок счисления производится по цифровой векторной карте транспортной сети города, что позволяет достичь точности ОМП до нескольких метров. Имеется возможность использования элементов бортового оборудования совместно с приемником СРНС.
По сравнению с приемниками СРНС приборы инерциальной навигации не подвержены воздействию радиопомех. Они начинают работать сразу после включения (не требуются 1 — 2 мин для загрузки информации со спутника, как в СРНС), зона их действия практически не ограничена (не требуется прямая видимость нескольких спутников), в них производятся курсоуказание, определение расстояния до ориентиров, измерение дирекционного угла. Очевидно, что в ближайшее время для систем местоопределения ТС приборы инерциальной навигации найдут наибольшее применение не в качестве автономных устройств, а как дополнение к устройствам спутниковой СРНС, что позволит увеличить точность местоопределения, устранить «мертвые зоны», потерю начальных участков маршрута.
Даже краткий обзор методов и аппаратуры ОМП позволяет сделать вывод, что не существует универсальной системы, способной удовлетворить все требования пользователя. Задача создания эффективно работающих систем ОМП оказывается гораздо шире выбора конкретного метода. Микросотовая структура систем связи может стать основой для построения зональных систем ОМП или позволит решать вопросы ОМП радиопеленгационными методами. Отдельно стоят вопросы создания электронных карт, предназначенных для эксплуатации с AVL-системами. Преимущества будут иметь те системы, в которых организована оперативная коррекция дорожной обстановки, вплоть до учета информации о заторах на отдельных участках транспортных магистралей.
Дата добавления: 2021-01-26; просмотров: 649;
Поиск по сайту
Узнать еще
- F42 Обсессивно-компульсивное расстройство
- F42.9 Обсессивно-компульсивное расстройство неуточненное
- F60.5 Ананкастное (обсессивно-компульсивное) расстройство личности
- I. Неомыляемые липиды (однокомпонентные)
- III. Сложные омыляемые липиды (многокомпонентные)
- III. Части речи и принципы их классификации
- IV. Критерии и принципы обеспечения безопасности
- IV. Основные принципы этикета государственного служащего

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
