Режимы полета вертолетов
Полет вертолета начинается с использования комплекса различных режимов движения: руление по взлетной площадке, вертикальный подъем на высоту контрольного висения, горизонтальный разгон скорости в воздухе или на взлетной полосе, набор высоты по наклонной траектории.
Руление (или буксировка) вертолета осуществляется для передвижения его на небольшое расстояние по аэродрому (например, со стоянки на старт или с места посадки на стоянку). Руление вертолетов разрешается только на ровной твердой поверхности. По запыленной или снежной поверхности (площадке) рулить рекомендуется таким образом, чтобы вихри пыли или снега оставались позади кабины.
Взлет представляет собой неустановившееся ускоренное движение вертолета от места старта до набора высоты стандартного препятствия (15 или 25 м).
Режим висения - наиболее характерный режим, при котором вертолет не перемещается относительно земли, а висит на определенной высоте. Этот режим выполняется при каждом взлете для проверки расчета центровки, исправности системы управления и других жизненно важных агрегатов и систем вертолета. Режим висения фиксирует вертолет на высоте менее10 м (чаще всего на высоте около 3 м). На этой же высоте после опробования всех систем управления выполняется перемещение (полет) вертолета со скоростью не более 10 км/ч. Снижение и приземление вертолета с режима висения производится всегда строго вертикально, против ветра и с вертикальной скоростью 0,1-0,2 м/с.
Взлет по-вертолетному является основным способом взлета. В зависимости от размера взлетной площадки, конфигурации и высоты окружающих ее препятствий, температуры воздуха, скорости и направления ветра взлет может быть выполнен по различным траекториям. Самое главное: при таком взлете подъемная сила вертолета возникает только за счет работы несущего винта.
Взлет по-самолетному выполняется в том случае, если избыточная сила тяги несущего винта недостаточна для взлета по-вертолетному из-за перегрузки вертолета. При таком взлете для разбега вертолета нужна посадочная площадка длиной 80-100 м. После отрыва вертолет выдерживают на высоте около 0,5 м до выхода на скорость 50-60 км/ч, а затем продолжают разгон с плавным набором высоты.
Горизонтальный разгон вертолета и набор высоты - завершающие этапы любого способа взлета вертолета. Разгон вертолета производится по слабо наклонной траектории и заканчивается на высоте 30-50 м, а затем продолжается набор высоты до заданного эшелона полета.
Горизонтальный полет вертолета может происходить с любой скоростью - от нулевой до максимально возможной,
Помимо установившегося горизонтального полета различают горизонтальные прямолинейные маневры вертолета (разгон, торможение, вираж, восьмерка, змейка), выполняемые для изменения скорости или (и) направления при неизменной высоте полета, маневры в вертикальной плоскости (горки и пикирование), а также пространственные маневры (спираль, боевой разворот и т.д.). Перечисленные фигуры относятся к фигурам простого пилотажа. К фигурам сложного пилотажа, которые в последнее время стали выполнять на вертолетах со спортивными или рекламными целями, относится петля Нестерова, так называемая «бочка», и др.
Для выполнения посадки также используется комплекс неустановившихся режимов движения вертолета: снижение по наклонной траектории, вывод из планирования (выравнивание), горизонтальное торможение (выдерживание), зависание, вертикальное снижение, приземление, пробег и руление с посадочной площадки на стоянку.
Посадка вертолета может производиться по-вертолетному (практически без поступательного движения), по-самолетному (споступательной скоростью) или в режиме самовращения несущего винта.
Посадка по-вертолетному - это посадка вертолета в обычных условиях. По-самолетному вертолет садится в тех случаях, когда по каким-либо причинам нельзя «зависнуть» над местом посадки, а на режиме самовращения несущего винта посадка осуществляется в аварийных ситуациях.
Планирование самолета
Прямолинейное снижение самолета с постоянной скоростью называется планированием. Рассмотрим планирование самолета для случая, когда подъемная сила равна нулю, т.е. Р = 0.
Схема сил, действующих на самолет при планировании, представлена на рис. 3.3.
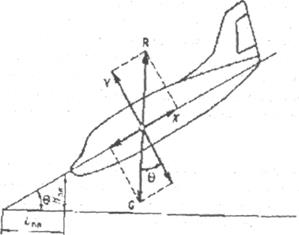
Рис. 3.3. Схема сил, действующих на самолет при планировании
При Р = 0 уравнения движения центра тяжести самолета будут иметь вид:
Y = G cos θ, (3.13)
X = G sin θ. (3.14)
Первое уравнение этой системы характеризует условие прямолинейности движения, а второе - условие постоянства скорости по траектории.
Разделим первое уравнение системы (3.13) на второе (3.14). Тогда получим
Y/ X = К = G cos θ/ G sin θ = ctg θ = 1/tg θ. (3.15)
Отсюда
θ = arctg 1/К. (3.16)
Следовательно, минимальный угол планирования будет при максимальном аэродинамическом качестве самолета К. Из рис. 3.3 видно, что L
L пл / Нпл = ctg θ = К или L пл = Нпл К. (3.17)
Последнее уравнение для дальности планирования, выраженное через высоту планирования и аэродинамическое качество самолета, является очень важным, т.к. планирование самолета с нулевой тягой (тот случай, который мы рассматриваем) на практике возможно только в двух случаях: при исправных, но специально выключенных двигателях или при вынужденной остановке двигателей в полете, т.е. тогда, когда на самолете возникает аварийная ситуация.
Дата добавления: 2020-12-11; просмотров: 2101;
Поиск по сайту
Узнать еще
- V. Режимы функционирования ВСМК
- Аварийные режимы работы зависимых инверторов
- Аварийные режимы работы электродвигателей
- Аварийные режимы работы ядерных реакторов
- Актуальность изучения дисциплины. Режимы обеспечения безопасности жизнедеятельности
- Анализ информации, получаемой от САРП. Режимы истинного и относительного движения, их достоинства и недостатки. Проигрывание маневра. Возможная опасность чрезмерного доверия САРП.
- Б) Режимы работы электрических цепей
- Барботажные колонны и режимы их работы

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
