Структура механизмов.
Вопросы, рассматриваемые на лекции. ТММ - научная основа новых машин и механизмов. Исторический очерк развития ТММ. Цели и задачи курса. Разделы ТММ. Основные виды звеньев. Кинематические пары. Степень подвижности механизмов. Структурная классификация механизмов. Условия существования кривошипа. Модификация механизмов при замене пар.
Некоторые основные понятия.
Теория механизмов и машин (ТММ)- наука, изучающая строение, кинематику и динамику механизмов в связи с их анализом и синтезом.
ТММ включает три основные части:
1. Структурный и кинематический анализ механизмов- изучение теории строения механизмов, исследование движения тел образующих механизм с точки зрения геометрии без учета сил, вызывающих движение этих тел.
2. Синтез механизмов- проектирование механизмов по заданным кинематическим и динамическим условиям.
3. Динамический анализ механизмов- определение сил, действующих на звенья механизма во время их движения, изучение взаимосвязи между движениями тел, их массами и силами действующими на них.
Машина- это устройство, создаваемое человеком, для облегчения физического и умственного труда, увеличения производительности путем частичной или полной замены человека.
Машина- устройство для преобразования энергии, информации или материалов.
Машины состоят из механизмов.
Механизм- система тел, предназначенная для преобразования движения одних тел (одного или нескольких) в требуемое движение других.
Например: механизм подачи заготовок, механизм сцепления, механизм торможения и т.д.
Механизмы состоят из звеньев и кинематических пар.
Звено- одно или несколько жестко соединенных твердых тел.
Кинематическая пара- соединение двух звеньев, допускающее относительное движение.
Звенья различают входные (ведущие), выходные (ведомые) и промежуточные.
Основные виды звеньев: стойка, кривошип, коромысло, ползун, кулиса, кулачок, зубчатое колесо.
Кроме перечисленных жестких звеньев, в механизмах применяют гибкие (цепи, ремни), упругие (пружины, мембраны) звенья, а также жидкие и газообразные (масло, вода, газ, воздух и т.д.).
Звенья обозначают цифрами, причем нумерация ведется от ведущего звена, а стойке присваивается «ноль».
Кинематические пары обозначают заглавными латинскими буквами (A,B,C,D и т.д.).
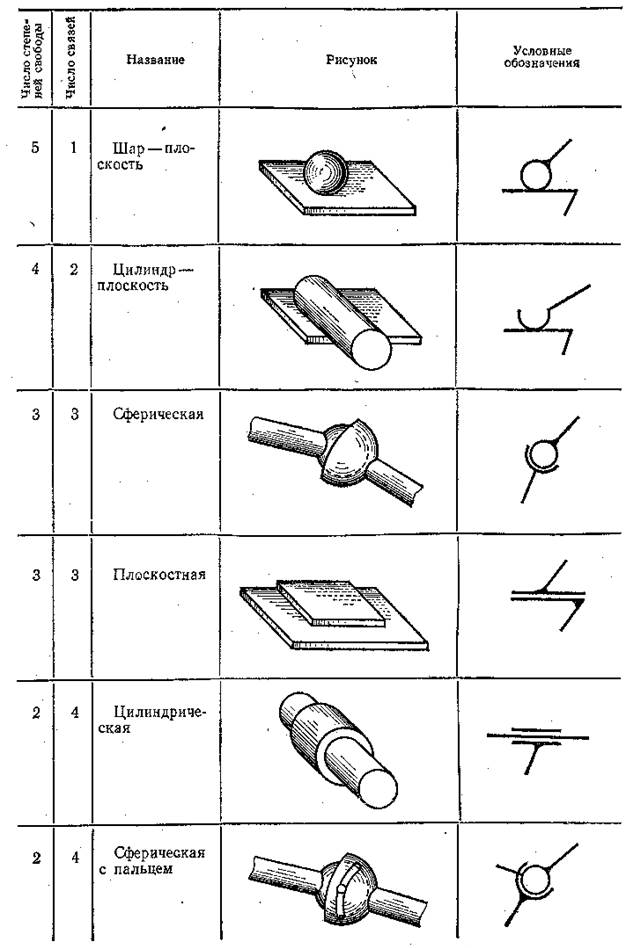
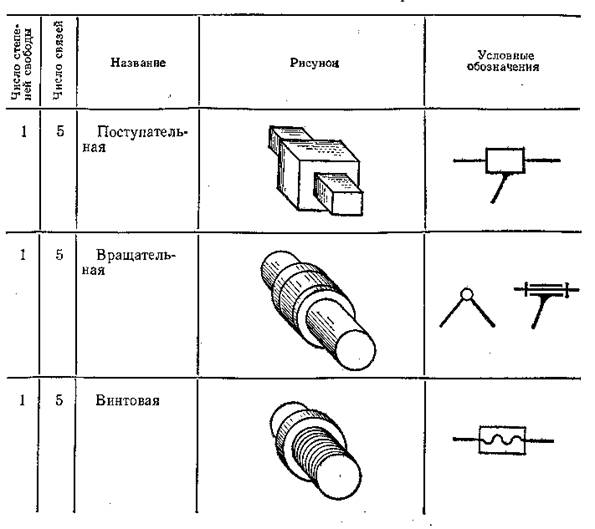
Основные виды кинематических пар (таблица 1)
Кинематическая схема механизма – чертеж механизма в выбранном масштабе с соблюдением условных обозначений звеньев и кинематических пар.
Различают кинематические пары высшие и низшие.
Высшая кинематическая пара – звенья соприкасаются по линии или в точке.
Низшая кинематическая пара – звенья соприкасаются по поверхностям (цилиндрический или шаровой шарниры, ползун и кулиса)
Различают кинематические пары с геометрическим и силовым замыканием
Геометрическое замыкание (характерно для низших пар) – соприкосновение элементов звеньев обеспечивается их формами (цилиндрический шарнир, шаровой шарнир, ползун и кулиса).
Силовое замыкание (характерно для высших пар) – соприкосновение обеспечивается силой веса, силой сжатия пружины и т.д.
Высшие пары изнашиваются сильнее, чет низшие, так как чем больше поверхности, тем меньше удельное давление (давление на единицу площади).
Различают пять классов кинематических пар.
Свободно движущееся в пространстве тело имеет шесть степеней свободы(W) – шесть движений (три поступательных, три вращательных).
Основные типы звеньев механизмов (таблица 2)
 |
Если же тело связано с другими телами, то на его движения накладываются ограничения – условия связи (U), тогда число степеней свободы не равно шести, оно уменьшается.
W=6-U
Примеры.
Класс кинематической паре присваивается по числу связей U.
Дата добавления: 2020-12-11; просмотров: 732;
Поиск по сайту
Узнать еще
- I. Государственный бюджет и его структура. три состояния государственного бюджета.
- I. Определение и структура методов обучения.
- I. Социальная структура дореволюционной России
- I. СТРУКТУРА СОВРЕМЕННЫХ НАЛОГОВЫХ СИСТЕМ.
- II. Социальная структура советской России
- III. Организационная структура ВСМК
- III. Социальная структура современной постсоветской России
- III. СТРУКТУРА И ОРГАНИЗАЦИЯ ДЕЯТЕЛЬНОСТИ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
