РАСЧЕТ ТЕЧЕНИЯ ОКОЛО ВРАЩАЮЩЕГОСЯ
ОПЕРЕННОГО ТЕЛА
Рассмотрим пример расчета вращающегося оперенного тела, экспериментально и теоретически исследованного в [9]. На рис.3.74 приведена геометрия планера: корпус – конус l = 1.86 + цилиндр l = 2.61; прямоугольное крыло - полный размах 2D, хорда 0.75D, где D - диаметр корпуса.
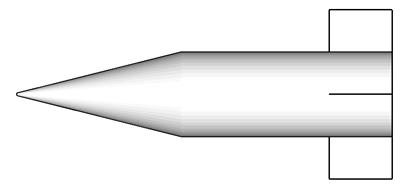
Рис.3.74
На рис.3.75 показан момент  в зависимости от безразмерной скорости вращения
в зависимости от безразмерной скорости вращения  при числе Маха М = 3, d = 5о для случаев: 1 - a = 0о, 2 - a = 10о. В качестве характерной площади - мидель корпуса; характерного размера – радиус корпуса. Для рассматриваемой геометрии угол атаки незначительно влияет на момент крена.
при числе Маха М = 3, d = 5о для случаев: 1 - a = 0о, 2 - a = 10о. В качестве характерной площади - мидель корпуса; характерного размера – радиус корпуса. Для рассматриваемой геометрии угол атаки незначительно влияет на момент крена.
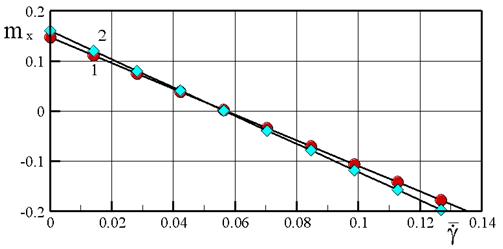
Рис.3.75
Прямой способ скорости авторотации предполагает расчет течения при наличии вращения с угловой скоростью  с определением . Надо подобрать значение
с определением . Надо подобрать значение  такое, чтобы момент по крену был равен нулю:
такое, чтобы момент по крену был равен нулю:  . Фактически скорость авторотации определяется точкой пересечения функции с осью абсцисс (см. рис.3.75).
. Фактически скорость авторотации определяется точкой пересечения функции с осью абсцисс (см. рис.3.75).
В ряде случаев скорость авторотации можно определить проще. Получив решение без вращения при заданном угле установки консолей d, находим коэффициенты момента по крену на консоль  и нормальной силы на консоль
и нормальной силы на консоль  . Центр давления на консоль по размаху определяется выражением:
. Центр давления на консоль по размаху определяется выражением:  . Скорость авторотации приближенно вычисляяется из соотношения
. Скорость авторотации приближенно вычисляяется из соотношения  , где V - скорость набегающего потока. Следовательно, безразмерная скорость авторотации
, где V - скорость набегающего потока. Следовательно, безразмерная скорость авторотации
 ,
,
где d - в радианах. Так может быть определена скорость авторотации без расчета течения с учетом вращения.
Если сделаны два расчета – без вращения и с некоторой скоростью вращения  , то из-за линейного изменения функции
, то из-за линейного изменения функции  имеем следующее выражение для нахождения скорости авторотации:
имеем следующее выражение для нахождения скорости авторотации:
 .
.
На рис.3.76 приведена скорость авторотации рассматриваемой геометрии в зависимости от угла атаки, полученная на основе: расчета без вращения (1), двух расчетов (2), расчетов при разных значениях (3). Результаты хорошо согласуются между собой и с экспериментальными данными [9].
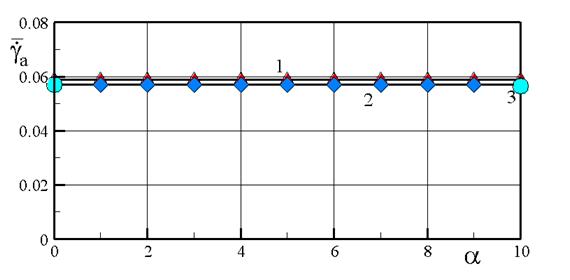
Рис.3.76
На рис.3.77 - 3.79 приведены волны, индуцированные косо поставленным оперением d = 5о: рис.3.77 – без вращения  ; рис.3.78 – в режиме авторотации
; рис.3.78 – в режиме авторотации  ; рис.3.79 –
; рис.3.79 –  .109. Течение представлено распределением Dp в сечении около задней кромки крыла. В представленном виде вращение направлено по часовой стрелке.
.109. Течение представлено распределением Dp в сечении около задней кромки крыла. В представленном виде вращение направлено по часовой стрелке.
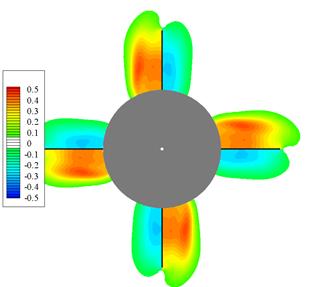
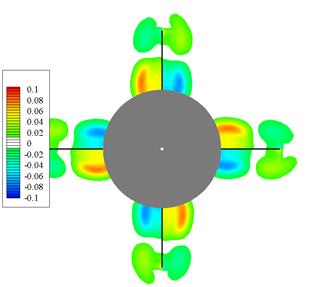
Рис.3.77 Рис.3.78
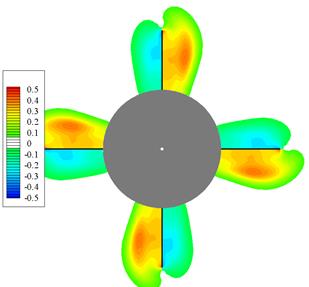
Рис.3.79
На примере планера представленного на рис.3.62, рассмотрим изменение скорости авторотации в зависимости от выбора рулевой поверхности.
На рис.3.80 приведена скорость авторотации в зависимости от угла атаки при М = 2 для четырех вариантов планера; аэродинамические поверхности, отклоненные для вращения по крену на угол d = 1о, выделены темным цветом.
Рис.3.80
Скорость авторотации  варианта 2 по сравнению с вариантом 1 выше из-за смещения центра давления по радиусу к бортовой хорде. Скорость авторотации вариантов 3 и 4 меньше по причине дополнительной аэродинамической поверхности. Вариант 3 условно соответствует схеме «утка» (косо поставленное крыло расположено сзади). Скос потока при малых углах атаки от стоящего впереди руля приводит к увеличению . В варианте 4 (условно соответствующего нормальной аэродинамической схеме), наоборот, на малых углах атаки скос от косо поставленного крыла на руль приводит к уменьшению .
варианта 2 по сравнению с вариантом 1 выше из-за смещения центра давления по радиусу к бортовой хорде. Скорость авторотации вариантов 3 и 4 меньше по причине дополнительной аэродинамической поверхности. Вариант 3 условно соответствует схеме «утка» (косо поставленное крыло расположено сзади). Скос потока при малых углах атаки от стоящего впереди руля приводит к увеличению . В варианте 4 (условно соответствующего нормальной аэродинамической схеме), наоборот, на малых углах атаки скос от косо поставленного крыла на руль приводит к уменьшению .
Представляет интерес влияние отклонения руля на . Для варианта 3 результаты представлены на рис.3.81, для варианта 4 – на рис.3.82.
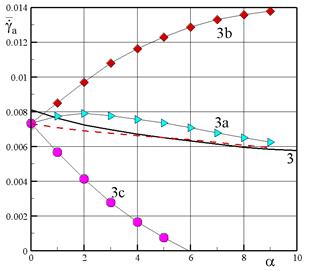
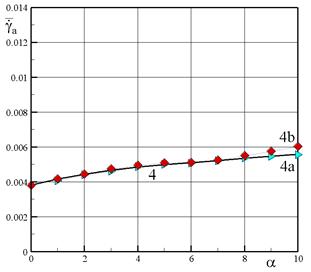
Рис.3.81 Рис.3.82
В случае схемы «утка», при отклонении стоящего впереди руля на угол 5о скорость авторотации существенно изменяется: линия 3а соответствует отклонению горизонтального руля, т.е. создающего подъемную силу в плоскости угла атаки; линии 3b и 3с - отклонению вертикального руля (в двух направлениях – влево и вправо), т.е. создающего боковую силу. В последнем случае из-за вращения ракеты отклонение руля в разных направлениях приводит к существенно разным результатам. Отклонение руля в скоростной системе координат достаточно условно из-за вращения. Пунктирной линией представлено среднеарифметическое значение 3b и 3c. Для схемы «утка» отклонение рулевых поверхностей может оказывать существенное влияние на момент по крену.
Отклонение руля в нормальной схеме мало влияет на скорость авторотации. Влияние руля проявляется только при его отклонении в вертикальной плоскости и больших углах атаки. Это связано с различиями условий обтекания лопастей руля, находящихся на наветренной и подветренной сторонах.
Дата добавления: 2016-09-06; просмотров: 2164;
Поиск по сайту
Узнать еще
- I. Расчёт методом контурных токов.
- II Расчет и анализ трехфазных цепей
- II. Получение вращающегося магнитного поля и принцип действия АД.
- II. Расчёт методом суперпозиции.
- III. Основные законы, используемые при расчёте магнитных цепей.
- III. Расчёт электрического состояния цепи с последовательным соединением элементов L, R, C.
- IV. Классификация в зависимости от локализации источника кровотечения
- IV. Расчёт простых цепей постоянного тока методом эквивалентных преобразований сопротивлений.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
