Кинематические схемы обработки
Кинематические схемы обработки поверхностей оптических деталей отображают абсолютные простые вращательные и поступательные движения, которые в том или другом сочетании сообщаются инструментам и заготовке в различной технологической системе станок-приспособление-инструмент-деталь. Кинематическая схема обработки является кинематической основой системы станок-приспособление-инструмент-деталь, которой они принципиально отличаются одна от другой. Наиболее распространенная кинематическая схема обработки сфер на станке типа ШП шлифованием и полированием сфер оптических поверхностей показана на Рис.14.3.
Из кинематической схемы станка выделены и рассматриваются простые движения вокруг осей 1-1 и 2-2. Поводок 4 качается вокруг оси 3 вместе с коромыслом 5 и вокруг последнего вместе с кареткой 6. Это сложное движение благодаря замыканию силой P шарового шарнира 7 приводится к простому плоскому движению вокруг центра обрабатываемой сферической поверхности. Принято условно, что обрабатываемая заготовка является всегда нижним звеном.
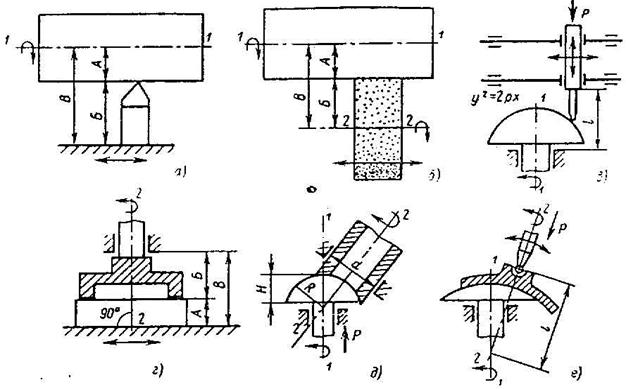
Рис.14.1 Системы СПИД обработки оптических деталей : а-геометрическое замыкание,
контакт в точке; б- геометрическое замыкание, соприкосновением по линии;
в-силовое замыкание, соприкосновение по линии; г-замыкание силовое,
соприкосновение по поверхности; д,е-замыкание силовое, соприкосновение
по поверхности, соответственно два и три вращательных движения
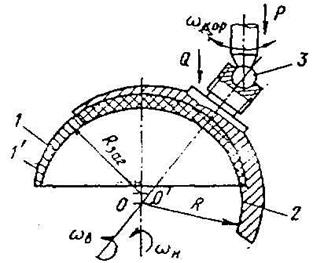
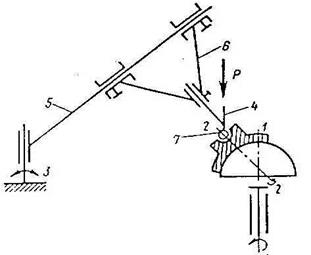
Рис.14.2 Схема обработки свободным Рис.14.3 Кинематическая схема
притиром. обработки притиркой.
Дата добавления: 2016-09-06; просмотров: 3058;
Поиск по сайту
Узнать еще
- IV. Экспериментальное определение параметров схемы замещения трансформаторов.
- А и Б – базы механической обработки
- Автоматизация и механизация токарной обработки
- Автоматизация обработки снимков на фотограмметрическом оборудовании
- Автоматизация обработки табличных данных (обработка списков)
- Агротехническая оценка качества обработки почвы
- Агротехнические методы (приемы) обработки почвы.
- Адресация микросхемы 8255А

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
