Общие определения и термины
Лекция 2. Основные понятия и определения теории автоматического регулирования
Общие определения и термины
Изменение какой-либо величины или нескольких величин по требуемому закону без участия человека называется автоматическим регулированием.
Техническое устройство, в котором осуществляется регулирование, называется объектом регулирования, а физические величины, подлежащие регулированию, называются регулируемыми величинами. В общем случае если y(t) изменение во времени регулируемой величины, а q(t) функция, характеризующая требуемый закон изменения, то задача регулирования сводится к их равенству в каждый момент времени:
y(t) = q(t).
Функцию q(t) называют задающим воздействием. В реальных условиях всегда существуют причины, отклоняющие регулируемые величины от требуемого закона изменения. Эти причины называют возмущающими воздействиями или возмущениями. Число возмущений обычно очень велико. Из общего числа возмущений можно выделить контролируемые возмущения и неконтролируемые – помехи. Физические величины, с помощью которых воздействуют на объект для решения задачи регулирования, называют регулирующими величинами. Так как регулирование и управление всегда происходят во времени, то для краткости записи указание зависимости величины от времени часто не пишут. Исходя из вышесказанного в общем случае объект управления (регулирования) можно изобразить схемой, показанной на рис. 3, а.
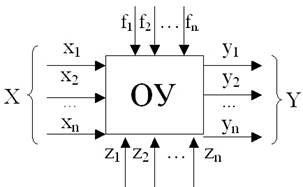

а) б)
Рис. 3. Схема объекта регулирования (управления): а – многомерного;
б – одномерного
На схеме рис.3, а обозначены: x – регулирующие величины; f - возмущения; z - помехи. Такой объект называется многомерным, так как число регулируемых параметров больше единицы. В большинстве случаев в объектах при регулировании изменяют одну регулируемую величину при помощи одной регулирующей, а появление помех (неконтролируемых возмущений) маловероятно. Кроме этого, при работе какого-либо технического устройства при металлообработке часто можно выделить одно главное возмущение, а остальными пренебречь. На основании этого объект регулирования можно представить схемой, показанной на рис. 3, б. Такой объект называют одномерным. Автоматические системы, регулирующие только одну величину, также называются одномерными системами, а регулирующие несколько величин – многомерными.
Техническое устройство, которое влияет на состояние объекта, изменяя регулирующую величину, называют регулирующим органом, а техническое устройство, посредством которого решается задача регулирования – автоматическим регулятором. При ручном регулировании на объект через регулирующий орган воздействует человек. Таким образом, задачей автоматизации является создание автоматического регулятора, который бы заменил человека-оператора.
Для регулирования необходима информация о состоянии объекта, которое характеризуется регулируемой величиной. Для этого нужно измерительное устройство. Измеренную регулируемую величину необходимо сравнить с заданной и имеющееся различие (если оно есть) подать в автоматический регулятор, который должен сформировать регулирующее воздействие на регулирующий орган, чтобы объект изменил свое состояние и различие было бы устранено с заданной точностью. Вышеописанное иллюстрируется структурной схемой автоматической системы, на которой указывают функции отдельных устройств, рис. 4. На схеме: ОР – объект регулирования; РО – регулирующий орган; ИУ – измерительное устройство; ЗУ – задающее устройство; АР – автоматический регулятор. Суммирующее устройство обозначается в виде окружности, разделенной на секторы. Если в нем происходит сравнение (вычитание), то нижний сектор, в который входит стрелка зачерняется. Связь между элементами схемы указывается стрелками. Автоматический регулятор, как правило, включает в себя усилительно-преобразовательное устройство (УП) и исполнительный механизм (ИМ).
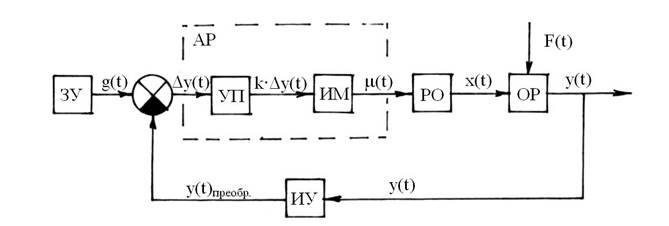
Рис. 4. Структурная схема автоматической системы
Над стрелками указаны изменяемые во времени физические величины, с помощью которых осуществляется регулирование: y(t) – регулируемая величина;
F(t) – возмущение; X(t) – регулирующая величина; y=y(t)–g(t) – отклонение y(t) от заданного значения (ошибка), появление которого вызывает μ(t)=X0(t)–X1(t) – регулирующее воздействие, т. е. разность между регулирующими величинами до возникновения отклонения X0(t) и после него X1(t). Связь выхода объекта с входом регулятора через элемент сравнения называется обратной связью. Обратная связь образует замкнутый контур, и системы с такой структурой называют замкнутыми. При отсутствии обратной связи система разомкнута, т.е. информация о состоянии объекта в регулятор не поступает. В зависимости от характера системы и видов используемой энергии в некоторых системах могут отсутствовать специальные измерительные устройства, усилитель, преобразователь. Все остальные элементы необходимы для любой системы. В указанной на рис. 4 системе происходит сравнение (вычитание) величин y(t) и g(t). Такая обратная связь называется отрицательной. Если же в суммирующем элементе складываются эти величины, то такая связь называется положительной. В этом случае обратная связь служит для максимально возможного увеличения регулируемой величины, что применяется в некоторых устройствах и системах, не связанных с регулированием. Закон обратной связи характерен для всех известных процессов не только в технике, но и в биологии, в обществе и т. д. – это любое сравнение того, что имеем, и того, что хотим или можем получить, с последующим действием в ту или иную сторону.
Изменение состояния объекта при выполнении им заданного технологического процесса при возмущениях описывается алгоритмом функционирования, т. е. последовательностью связанных друг с другом предписаний (математически или логически). Совокупность внешних организованных воздействий на объект со стороны автоматического регулятора называется алгоритмом регулирования.
Дата добавления: 2019-02-08; просмотров: 1440;
Поиск по сайту
Узнать еще
- F84 Общие расстройства развития
- III. Библиографическое описание документа. Общие требования и правила. ГОСТ 7.1-84
- IV. Направленность ППФП (общие и специальные требования)
- U-Pb метод определения возраста по циркону
- XXVII. ОБЩИЕ ХАРАКТЕРИСТИКИ ГРИБОВ
- А) Общие определения
- А) Общие требования к составлению уравнений баланса электрической цепи
- АДСОРБЦИЯ. Общие сведения

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
