Системы автоматического регулирования
Системы автоматического регулирования (САР) – это системы, которые в течение длительного времени поддерживают определенное значение регулируемой величины в каком-либо процессе или изменяют ее по заранее заданной программе. Как следует из диаграммы (рис. 2) САР подразделяются на стабилизирующие, следящие и системы программного регулирования.
Стабилизирующие САР. Стабилизирующими системами автоматического регулирования называют системы, алгоритм функционирования которых содержит предписание поддерживать регулируемую величину постоянной. Пример такой системы – генератор с угольным регулятором, рис. 5
Генератор с угольным регулятором поддерживает постоянство напряжения на нагрузке RН при ее изменении (например, подключение к генератору новых потребителей энергии). Это же напряжение подается на катушку электромагнита 1, которая имеет втягивающийся сердечник (якорь магнита) 2, выталкиваемый пружиной 4, сжатие которой регулируется винтом 3 (рис. 5, а). Пружина 4 сжимает угольные шайбы, включенные последовательно в цепь обмотки возбуждения.
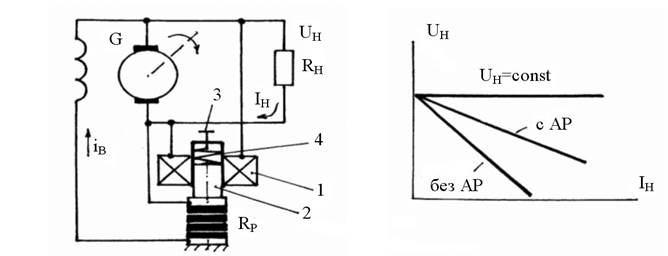
Рис. 5. Генератор с угольным регулятором (а) и его статическая характеристика (б)
Таким образом, ток в обмотке возбуждения зависит от сопротивления пакета шайб Rp, которое в свою очередь обусловлено усилием их сжатия. Усилие сжатия зависит от разности выталкивающей сердечник силы пружины и втягивающего усилия электромагнита, следовательно, от величины тока, протекающего в обмотке электромагнита, т.е. (по закону Ома) от напряжения в нагрузке. Если напряжение нагрузки стало меньше, чем заданное, то усилие магнита ослабевает, пружина больше сжимает пакет, сопротивление в цепи возбуждения уменьшается, ток возбуждения возрастает и напряжение на выходе генератора (на нагрузке) стремится к заданному. При возрастании напряжения нагрузки – наоборот. Изменение заданного уровня регулируемого напряжения производится изменением силы сжатия пружины винтом 3 (задающие устройство). Таким образом, в системе обеспечивается стабилизация напряжения (регулируемая величина) нагрузки генератора (объект регулирования), путем изменения тока возбуждения (регулирующая величина) с помощью угольного регулятора через изменение сопротивления пакета угольных шайб (регулирующее воздействие). В этой системе отсутствует усилитель, т. е. устройство, которое обеспечивает дополнительную энергию для регулирования. Требуемая энергия берется прямо от объекта. Такие системы называются системами прямого регулирования. Если же энергия для регулирования берется извне, то это системы непрямого регулирования. После устранения ошибки необходимо, чтобы сопротивление угольных шайб осталось неизменным, т. е. соответствовало бы новым условиям. Однако в этой системе это невозможно, т. к. после устранения ошибки напряжение нагрузки становится прежним (до появления возмущения), а это значит, что усилие магнита также изменится и возбуждение вернется к прежнему уровню, т. е. снова появится ошибка. После некоторого переходного процесса в этой системе установится новое значение напряжения нагрузки, которое будет отличатся от заданного, но это отличие будет значительно меньше, чем в отсутствии всякого регулятора (рис. 5, б). Регулятор и системы с таким регулятором называются статическими, ошибка в них неизбежна, т. к. регулирующее воздействие определяется возмущением. Достоинством таких систем является относительная простота конструкции регулятора и его высокие динамические свойства, а основным недостатком – наличие неизбежной ошибки. Такие системы широко применяются в тех случаях, когда получаемая ошибка удовлетворяет заданной точности.
Следящие САР. Следящими называются системы, алгоритм функционирования которых содержит предписания изменять регулируемую величину в соответствии с изменением какой-либо другой величины, которая непрерывно замеряется. Пример такой системы – следящая система поворота стола, рис. 6.
 При изменении положения штурвала 1 в диагонали моста, образованного потенциометрами R1 и R2 возникает напряжение ∆U, которое поступает в усилительно-преобразовательное устройство А. К выходу устройства подключена обмотка управления двухфазного асинхронного двигателя М. Двигатель начинает вращаться и поворачивает стол. Поворот будет происходить до тех пор, пока связанный со столом подвижный контакт потенциометра R1 не займет положения, соответствующего положению подвижного контакта R2, и напряжение ∆U не станет равным нулю. Таким образом, следящие САР служат для изменения регулируемой величины по закону, который ранее неизвестен, и задающее воздействие представляет собой случайную функцию. Источником возмущения служит задающее устройство (штурвал – подвижный контакт R2). В этой системе после отработки рассогласований (ошибки) исполнительный механизм не возвращается в исходное положение, как в предыдущей системе, а остается в том положении, где его застало окончание регулирования (двигатель М). Таким образом, ошибка в этой системе теоретически может быть равна нулю, т. к. регулирующее воздействие не зависит прямо пропорционально от возмущения. Такие системы называются астатическими. Их достоинство – высокая точность. Ошибка в них появляется только за счет неточности работы отдельных технических устройств (например, инерционность, зона нечувствительности и т. д.). Система (рис. 6) непрямого регулирования, т. к. энергия для регулирования берется извне (усилитель). Недостатком таких систем является худшее поведение в переходных процессах.
При изменении положения штурвала 1 в диагонали моста, образованного потенциометрами R1 и R2 возникает напряжение ∆U, которое поступает в усилительно-преобразовательное устройство А. К выходу устройства подключена обмотка управления двухфазного асинхронного двигателя М. Двигатель начинает вращаться и поворачивает стол. Поворот будет происходить до тех пор, пока связанный со столом подвижный контакт потенциометра R1 не займет положения, соответствующего положению подвижного контакта R2, и напряжение ∆U не станет равным нулю. Таким образом, следящие САР служат для изменения регулируемой величины по закону, который ранее неизвестен, и задающее воздействие представляет собой случайную функцию. Источником возмущения служит задающее устройство (штурвал – подвижный контакт R2). В этой системе после отработки рассогласований (ошибки) исполнительный механизм не возвращается в исходное положение, как в предыдущей системе, а остается в том положении, где его застало окончание регулирования (двигатель М). Таким образом, ошибка в этой системе теоретически может быть равна нулю, т. к. регулирующее воздействие не зависит прямо пропорционально от возмущения. Такие системы называются астатическими. Их достоинство – высокая точность. Ошибка в них появляется только за счет неточности работы отдельных технических устройств (например, инерционность, зона нечувствительности и т. д.). Система (рис. 6) непрямого регулирования, т. к. энергия для регулирования берется извне (усилитель). Недостатком таких систем является худшее поведение в переходных процессах.
Системы программного регулирования. Алгоритм функционирования этих систем содержит предписание изменять регулируемую величину в соответствии с заранее заданным законом. Например, система программного регулирования температуры печи для термообработки, рис. 7.
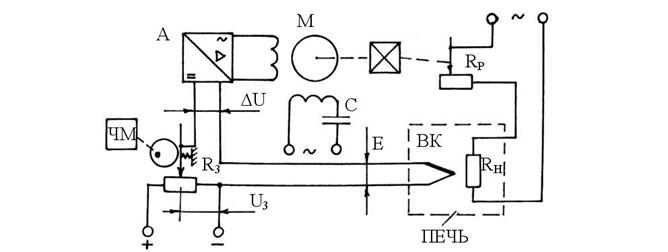
Рис. 7. Система программного регулирования температуры
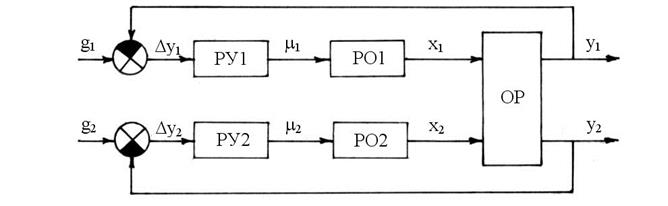
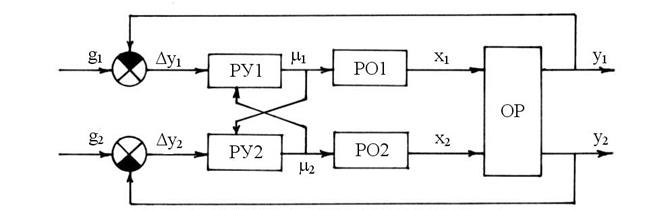
Нагреватель печи Rн изменяет температуру при помощи реостата Rр. Положение подвижного контакта реостата изменяет интенсивность нагрева и подъем или снижение температуры. Температура печи измеряется термопарой ВК, ЭДС которой Е сравнивается с заданным напряжением U3 потенциометра R3. При наличии разности ∆U усиленный и преобразованный сигнал подается на обмотку управления двигателем М, который через редуктор перемещает движок реостата в сторону уменьшения рассогласования. Программа изменения температуры задается профилем кулачка, перемещающего подвижный контакт потенциометра R3 часовым механизмом ЧМ. Если профиль кулачка постоянный, то система превращается в стабилизирующую: изменение температуры печи приводит к работе регулятора. Если произвольно перемещать подвижный контакт R3, то система работает как следящая. Таким образом, все системы регулирования имеют подобную структуру и принципы их построения и анализа работы одинаковы. Система на рис. 7 непрямого регулирования, астатическая, т. к. после устранения ошибки движок реостата останется в том положении, где его застанет окончание процесса регулирования. Обратная связь во всех представленных системах отрицательная, причем в системе (рис. 5) нарушение обратной связи (отключение электромагнита) приводит к увеличению напряжения генератора до максимума, а в указанных на рис. 6 и 7 не изменяет значения регулируемой величины, т. к. на вход усилителя подается напряжение только при наличии рассогласования (ошибки). В первом случае такая обратная связь называется жесткой, во втором – гибкой. Системы автоматического регулирования могут иметь и более сложную структуру. Если объект имеет две регулируемые величины, но каждая свой независимый регулятор, то это несвязное регулирование (рис. 8, а). Если же работа одного регулятора корректирует работу другого, то такое регулирование и система называются связными. В автоматическом регуляторе могут быть дополнительные обратные связи, улучшающие его работу и образующие дополнительные замкнутые контуры. Такие системы называют многоконтурными. В зависимости от принципа формирования регулирующего воздействия САР также делят на системы непрерывного и дискретного (прерывистого) действия. В непрерывной системе необходимая для регулирования информация существует в любой момент времени. В дискретных системах информация может подаваться в виде импульсов. В зависимости от принципа преобразования (квантования) сигнала из непрерывного в дискретный различают системы релейного регулирования (с реле), импульсного (с импульсным элементом) или цифрового (сигнал подается в виде цифрового кода). Релейные системы относительно просты, но имеют пониженную точность. Импульсные системы обеспечивают высокую точность и повышенную помехозащищенность. Цифровое регулирование наиболее точно, но имеет более высокую стоимость.
а)
б)
Рис. 8. Схема несвязного (а) и связного регулирования (б): РУ – регулирующее устройство
Дата добавления: 2019-02-08; просмотров: 1679;
Поиск по сайту
Узнать еще
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Филогенез эндокринной системы.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- L.3. Состояние российской системы образования и необходимость ее
- T-FlexCAD (Топ Системы, Москва) и др.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
