Астное.8 отдельно отображается ения десятичного с дробью числа, а типовой для него формат вывода может представиться неудобным

Рис. 3.13
Как это всё будет выглядеть на экране, показано на иллюстрации:

8. БлокPULSE  -импульс. Как только на вход блока приходит импульс, блок PULSE на своём выходе формирует короткий импульс, по времени совпадающий или с передним фронтом импульса на входе From OFF to ON (переход с выключенного состояния на включенное), или с задним фронтом входного сигнала (From ON to OFF), или с обоими фронтами. Задание режима выдачи импульсов на выходе – через окно диалога.
-импульс. Как только на вход блока приходит импульс, блок PULSE на своём выходе формирует короткий импульс, по времени совпадающий или с передним фронтом импульса на входе From OFF to ON (переход с выключенного состояния на включенное), или с задним фронтом входного сигнала (From ON to OFF), или с обоими фронтами. Задание режима выдачи импульсов на выходе – через окно диалога.
9. Блок GAIN  -назван как «коэффициент усиления». Этот блок выполняет операции над аналоговым сигналом X в соответствии с уравнением: Y = (A / B) • X + C. В этом уравнении X – выходной сигнал датчика (входной для ПЛК), а Y – это то число, которым измеряемый параметр будет характеризоваться в контроллере с учётом конкретных характеристик объекта управления.
-назван как «коэффициент усиления». Этот блок выполняет операции над аналоговым сигналом X в соответствии с уравнением: Y = (A / B) • X + C. В этом уравнении X – выходной сигнал датчика (входной для ПЛК), а Y – это то число, которым измеряемый параметр будет характеризоваться в контроллере с учётом конкретных характеристик объекта управления.
Необходимость в преобразованиях такого рода возникает очень часто. Это не только приведение сигнала к какому – то уровню путём задаваемого усиления (A / B), но и при согласовании характеристик объекта с применяемым типом датчика.
Пример на использование блока GAIN.Уровень среды в резервуаре (рис.3.14) контролируется датчиком, работающим по принципу эхолота. Пусть он установлен в верхней зоне резервуара, излучает колебания (длину волны излучения не учитываем) в направлении среды и принимает отраженный от границы уровня заполнения сигнал. Время двойного пробега сигналом расстояния между датчиком и границей среды пересчитывается в нормированный выходной сигнал датчика в любом из двух взаимно пересчитываемых форматов: 0 ÷ 20 mA или0 ÷10B.
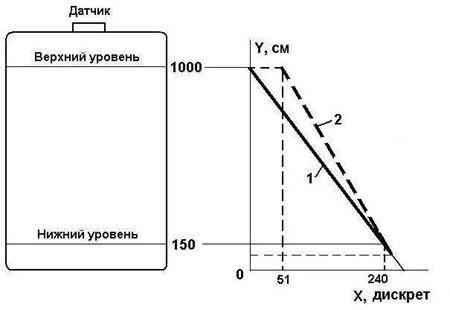
Рис. 3.14
А. При таком методе измерения верхнему уровню среды соответствуют минимальные значения измеренного времени прохождения сигнала и, следовательно, их сигнального представления X, а нижнему – максимальные. Как показано в разделе 1.2.2, аналоговый сигнал, выраженный в вольтах, контроллер переводит в число дискрет. Помня об этом, следует согласовать стандартный диапазон изменения сигнала в вольтах с геометрическими параметрами объекта, и сделать это надо с использованием блока GAIN.
§ При верхнем уровне среды Y = 1000 см, а выходной сигнал датчика X = 0. При этих условиях из уравнения блока Y = (A / B) • X + C найдётся значение C = 1000.
§ Нижнему значению уровня Y = 150 см пусть будут соответствовать 240 дискрет вместо возможных 255. Это выбрано для того, чтобы не приближаться к предельным значениям, которым на рис. 3.14 будет соответствовать более низкий уровень, чем 150 см (штриховая линия). Отсюда: Y = 150 = (A / B) • 240+1000, следовательно, (A / B) = - 3,54.
§ Примем A = - 400, тогда B = 113.
Найденные значения A, B и C вводятся параметрами уравнения блока GAIN в его диалоговом окне.
По полученному уравнению Y = ( - 400 / 113) • X +1000 рассчитаны входные и выходные значения блока GAIN, образующие в совокупности характеристику 1 на рис. 3.14.
В приведённой таблице показано, какие значения сигнала X, полученные с датчика и выраженные в дискретах, контроллер воспринимает как значения конкретных уровней среды (в сантиметрах) в резервуаре с вполне определёнными геометрическими размерными соотношениями.
| X | дискрет | ||||||||||
| Y | уровень |
Похожим способом можно рассчитать требуемые значения коэффициентов уравнения для других диапазонов представления сигналов, для других видов расположения характеристики датчика.
Б. Допустим, что при тех же исходных данных поменялось только одно: датчик имеет диапазон изменения сигнала 4 ÷ 20mA. Как при этом изменятся коэффициенты уравнения?
§ Диапазон 4 ÷ 20 mA легко переводится к виду: 2 ÷ 10B или 51 ÷ 255 дискрет. Как и раньше, вместо 255 взято 240 дискрет.
§ В граничных точках диапазона выполним подстановки: Y = 1000 = (A / B) • 51 + C; Y = 150 = (A / B) • 240 + C. После исключения C определено: (A / B) = - 4,5. Принято: A = - 450, B = 100. Найдено: C= 1230.
По уравнению Y = ( - 450 / 100) • X + 1230 рассчитана характеристика 2 на рис. 3.14.
В. Другим вариантом можно рассмотреть часто применяемое измерение уровня с помощью датчика ёмкостного типа рис.3.15. По мере заполнения резервуара продуктом изменяется электрическая ёмкость «конденсатора», образованного измерительным зондом (стержень, трос, труба и т. д.) и, как в одном из вариантов, металлической стенкой резервуара. Эта ёмкость преобразуется в изменяемую частоту импульсов, которая затем пересчитывается в один из нормированных уровней сигнала (0/4 ÷ 20mA или 0 ÷ 10В) .
В-1. Получим значения коэффициентов настройки блока GAIN для вывода данных на экран, если уровень среды в резервуаре может изменяться от 0 до 30 метров с диапазоном контроля за ним 50см ÷ 30метров (показано на рисунке без скобок). Чтобы не потерять контроль за уровнем жидкости в случае его незначительного превышения отметки 30 метров примем, что значению 3000 см будет соответствовать 240 дискрет из 255 возможных.
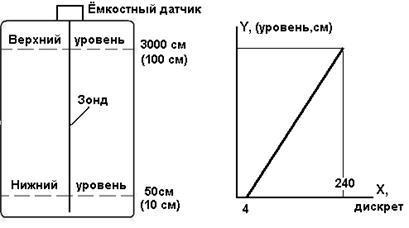
Рис.3. 15
Из пропорции 3000 см ÷ 240 дискрет
50 см ÷ X дискрет
легко определяется число дискрет, соответствующее уровню 50см: N= 50 ∙ 240 / 3000 = 4.
В результате подстановки в решаемое блоком уравнение Y= (A/B)+C получается: 50 = (A / B) ∙ 4 + C; 3000= (A / B) ∙ 240 + С. Так как C= 50 – 4 ∙(A / B), то (A / B) = 12,5, а C=0.
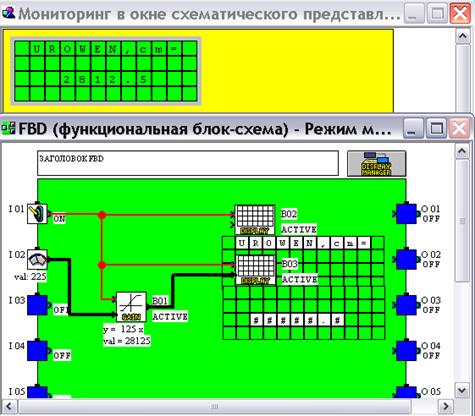
Рис.3.16
Если ввести в окне описания блока GAIN значения: A=125, B= 10, C=0, то на экране контроллера уровень будет отображаться целыми числами.
Чтобы получить отображение с точностью до одного десятичного знака, можно увеличить (A / B)в десять раз, т.е. до 125, а вывод на дисплей провести с коэффициентом (1/10). Для этого достаточно задать следующие значения: A=125, B=1, C=0, а блоком B 03 провести отображение результата измерения с кратностью (1 / 10). Фрагмент моделирования приведён на рис. 3.16.
В-2. Расчёт, выполненный в такой же последовательности для резервуара высотой один метр (в скобках на рис. 3.15), приводит к следующим результатам: (A / B) =0,417, C = 0. Поэтому можно выбрать вводимые в GAIN коэффициенты: A = 417, B = 1000, C = 0, а отображение выполнить при коэффициенте (1/1).
В.3. Никогда нельзя дать гарантию того, что при эксплуатации объекта фактический уровень среды в резервуаре не превысит тот, который принят за верхний. Чтобы предотвратить возможность перелива или, если этого избежать не удаётся, то минимизировать возможные нежелательные последствия этого, нужно предусматривать выдачу с контроллера сигналов оповещения об опасности выхода объекта за пределы штатного режима работы. Сигналы тревожного оповещения могут быть поданы как через выносные элементы (лампы, пищалки и т. п.), активизируемые программой контроллера, так и с использованием специализированных информационных панелей, предназначенных для мониторинга процесса. Можно посмотреть, как эту задачу реализовать через встроенный экран контроллера.
Дополним «схему» рис.3.16 так, чтобы она приняла вид рис. 3.17. Компаратор B 05 сравнивает выходной сигнал блока GAIN с уставкой в соответствии с заданием: > 30000, (как было условлено, 30000 – это число, в 10 раз превосходящее верхний контролируемый уровень среды). Как только выходной сигнал блока GAIN превысит значение 30000, компаратор активизирует выдачу прерывистого звукового сигнала (O 06) с частотой следования секундных импульсов (M 03) и вызовет формирование мигающей подсветки на позиции X = 11, Y= 3 экрана контроллера.
В нижней части рис. 3.17 совмещённо показаны два состояния окна мониторинга: с включённым и погашенным отображением мигающей метки. Формирование метки задано выбором кнопки Graph в окне описания блока B 06.
Поскольку выдача сигнала тревоги свидетельствует о выходе объекта из штатного режима работы, должны быть приняты меры принудительного возвращения его в обычный режим. В одном случае может стать достаточным некоторое увеличение порога сравнения в компараторе (неровность поверхности, волна, рябь при наливе), в другом – могут потребоваться средства для экстренного перекрывания питающей магистрали, в третьем - включение аварийного слива. Выбор конкретного решения зависит от характеристик объекта и тех материальных затрат, на которые можно пойти из соображений технической целесообразности и требований экологии.
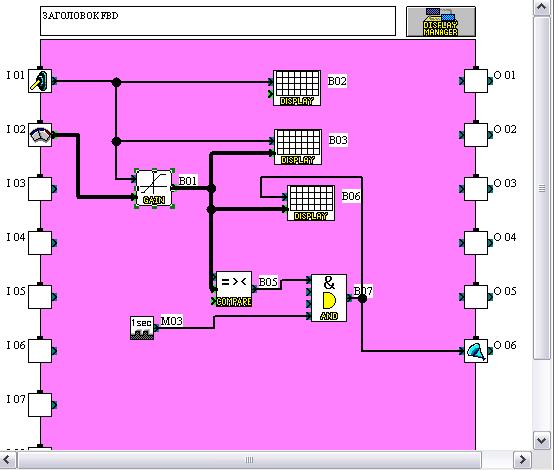
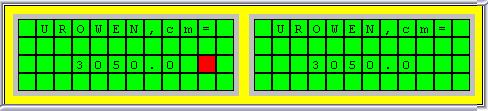
Рис.3.17
10.Блок DELAY  -блок задания временных задержек.Онпозволяет обеспечить задержку фронтов импульса на дискретном выходе блока по отношению к импульсу на дискретном входе. Величина задержки может задаваться в пределах:
-блок задания временных задержек.Онпозволяет обеспечить задержку фронтов импульса на дискретном выходе блока по отношению к импульсу на дискретном входе. Величина задержки может задаваться в пределах:
On Operation Delay (задержка на включение) …. (0 to 32767) • ∆t;
Off Operation Delay(задержка на выключение) …. (0 to 32767) • ∆t.
Коэффициент ∆t выбирается из трёх значений в списке Time Unit(единиц времени): 1s; 100ms; 10ms - для α – 2;
100ms - для α.
Особенности использования блока DELAY:
Задержка на включение не может быть больше времени включенного состояния I 01(рис.3.18).
Задержка на выключение (она может быть реализована только в том случае, если за время включённого состояния I 01 выход блока B 01 на рис.3.18 успел перейти в состояние ON) отрабатывается блоком, даже если она задана по максимуму отведённых значений.
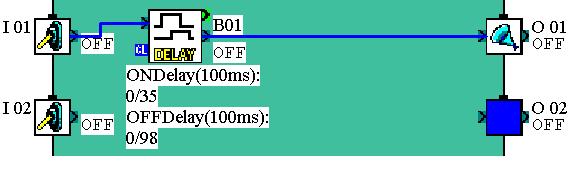
Рис.3.18
Р
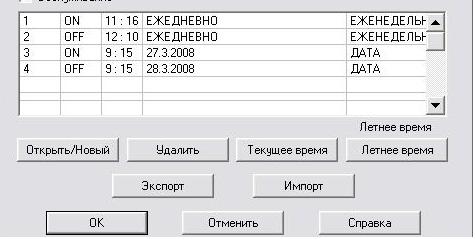
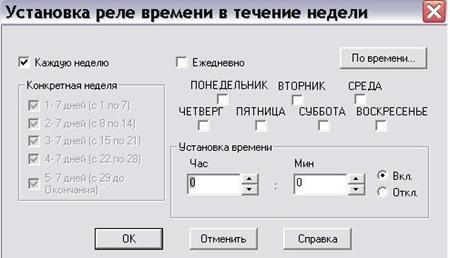
11. Блок TIME SW  - реле времени. Он предоставляет большие возможности по заданию управляющих воздействий, происходящих «по расписанию» в соответствии с вводимыми временными установками. В окне диалога выбор Open / New (открыть / новый) можно задать включение (ON) и выключение (OFF) выходного сигнала блока в конкретное время (часы, минуты), задаваемое в поле Setting Time (установка времени) с дискретностью в один день или ежедневно (Daily), с конкретизацией по целым неделям месяца или месяцам в целом (Everi Week), а также по конкретной дате.
- реле времени. Он предоставляет большие возможности по заданию управляющих воздействий, происходящих «по расписанию» в соответствии с вводимыми временными установками. В окне диалога выбор Open / New (открыть / новый) можно задать включение (ON) и выключение (OFF) выходного сигнала блока в конкретное время (часы, минуты), задаваемое в поле Setting Time (установка времени) с дискретностью в один день или ежедневно (Daily), с конкретизацией по целым неделям месяца или месяцам в целом (Everi Week), а также по конкретной дате.
Перечисленные возможности позволяют запрограммировать достаточно сложные расписания работы, охватывающие длительные интервалы времени, составить программы работы различных автоматических устройств.
12. Блок  - выполняет функцию модуляции ширины импульсов. Благодаря широтно– импульсной модуляции (ШИМ) достигается возможность плавного изменения величины выходного сигнала. До сих пор говорилось только о том, как ввести изменяемый по величине входной сигнал, но управление выходом велось исключительно по принципу «включено / выключено». Только сейчас появилась возможность говорить о плавном изменении какого – либо выходного параметра, допустим, о регулировании скорости вращения электрической машины, об управлении температурой объекта за счёт регулируемого электропитания нагревательных элементов.
- выполняет функцию модуляции ширины импульсов. Благодаря широтно– импульсной модуляции (ШИМ) достигается возможность плавного изменения величины выходного сигнала. До сих пор говорилось только о том, как ввести изменяемый по величине входной сигнал, но управление выходом велось исключительно по принципу «включено / выключено». Только сейчас появилась возможность говорить о плавном изменении какого – либо выходного параметра, допустим, о регулировании скорости вращения электрической машины, об управлении температурой объекта за счёт регулируемого электропитания нагревательных элементов.
В простейшем варианте это можно представить следующим образом. Задающее воздействие в виде уровня напряжения определяет температуру, до которой нужно нагреть объект. Фактическая температура измеряется датчиком, сигнал преобразуется в напряжение, которое сравнивается с напряжением задатчика. Их разность, представляющая собой ошибку регулирования, после усиления (блоки, позволяющие это сделать, нами уже рассматривались) подаётся на аналоговый вход блока PWM, который формирует широтно – модулированное напряжение, среднее значение которого пропорционально сигналу рассогласования. Это напряжение через выходной порт контроллера увеличивает ток в нагревательном элементе, температура объекта приближается к заданной.
Б
Б
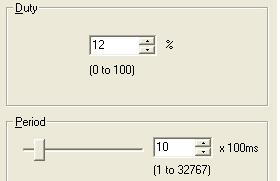
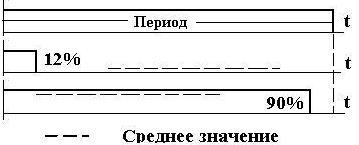
В диалоговом окне блока задаётся длительность периода в диапазоне от 0,1 до 3276,7 секунд. В окне Duty – количество процентов ( можно задать от 0 до 100, но введено 12%) от этого периода, в течение которых выходной сигнал принимает значение ON, а в оставшуюся часть периода – OFF. Если теперь в поле Duty ввести 90%, то, как это можно заметить из рис. 3.19, среднее значение выходного напряжения блока (его уровень показан штриховыми линиями) Uвых. ср. = [(введённое значение в %)• Uпит ] /100 увеличится.
Б
Рис. 3.19
Возможность изменять среднее значение напряжения с помощью этого блока – очевидна. Но изменение это выполнять вручную, с клавиатуры, неинтересно, да и пользы мало. Поэтому надо сделать так, чтобы уровень выходного напряжения стал зависящим от какого – либо сигнала, и им можно было бы управлять «автоматически».
Сделать это нетрудно: достаточно лишь на аналоговый вход блока PWM подать сигнал от того функционального блока программы, который отслеживает изменения мгновенного значения управляющего сигнала. При этом тот временной интервал, который задаётся процентной долей периода и характеризуется активным уровнем сигнала, будет определяться величиной этого сигнала.

Использование блока PWMобеспечивает хоть и достаточные, но не совсем удобные возможности для вывода аналоговых управляющих воздействий через порт дискретного выхода контроллера. Дискретная форма ШИМ - сигнала (рис.3.19), выводимого через этот порт, с точки зрения средних значений не может считаться нормированным сигналом. Для того, чтобы обеспечить его сопрягаемость с нормированными параметрами входа исполнительных устройств (краны, задвижки, частотные преобразователи и т.д.), его надо подвергнуть промежуточным преобразованиям в такой последовательности: фильтрация, сглаживание фильтром низкой частоты и преобразование в один из нормированных сигналов. Для последнего этапа такого преобразования вполне подходят специализированные модули фирмы DATAFORTH [ПРОСОФТ, 2005/06,стр. 5 - 3]. Модули с входным сигналом 0 ÷ 5 В преобразуют его :
SCM5B392 – 01 в токовый сигнал 4 ÷ 20 mA,
SCM5B39 – 03 в токовый сигнал 0 ÷ 20 mA,
а модуль SCM5B392 - 03 входной сигнал 0 ÷ 10 В преобразует в токовый 4 ÷ 20 mA.
13.В разных средах программирования для некоторых моделей ПЛК предусмотрен блок аналогового выхода, который в Alpha Programming имеет обозначение  .
.
14.Блок  реализует функцию одновибратора. Его назначение состоит в формировании длительности одиночного импульса при поступлении на вход блока управляющего сигнала. Начало выходного импульса всегда совпадает с передним фронтом входного дискретного сигнала. Длительность формируемого импульса задаётся в окне описания режима работы блока, но отрабатывается в зависимости от установленного одного из двух режимов. В первом режиме – длительность выходного импульса не зависит от времени нахождения входного сигнала в состоянии ON. Во втором – длительность выходного сигнала не может превышать время нахождения разрешающего сигнала на уровне ON. По сути дела блок позволяет получить из входного импульса произвольной длительности один - единственный импульс требуемой длительности.
реализует функцию одновибратора. Его назначение состоит в формировании длительности одиночного импульса при поступлении на вход блока управляющего сигнала. Начало выходного импульса всегда совпадает с передним фронтом входного дискретного сигнала. Длительность формируемого импульса задаётся в окне описания режима работы блока, но отрабатывается в зависимости от установленного одного из двух режимов. В первом режиме – длительность выходного импульса не зависит от времени нахождения входного сигнала в состоянии ON. Во втором – длительность выходного сигнала не может превышать время нахождения разрешающего сигнала на уровне ON. По сути дела блок позволяет получить из входного импульса произвольной длительности один - единственный импульс требуемой длительности.
Одним из возможных примеров применения блока ONE SHOT рассмотрим формирование сигналов включения и отключения трёхфазной нагрузки через магнитный пускатель от контроллера. Схема магнитного пускателя без устройств защиты, приведенная на рис. 3.20, содержит три силовых СК и один блокировочный БК контакты и обмотку контактора ОК. При нажатии кнопки Пуск потечёт ток по цепи: фаза C– ОК – кнопка Пуск – кнопка Стоп – фаза B.
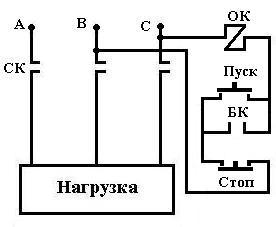
Рис. 3.20
Контактор сработает, нагрузка окажется включенной на напряжение сети, так как силовые контакты СК замкнутся. Но вместе с ними замкнётся блокировочный контакт БК, который зашунтирует кнопку Пуск. С этого момента кнопку Пуск нет необходимости удерживать в нажатом состоянии, так как ток через ОК сможет протекать через БК. Такое состояние сохраняется до тех пор, пока не будет нажата кнопка Стоп. Обмотка контактора обесточится, контактные группы разомкнутся, а нагрузка отключится.
Так происходит ручное управление включением нагрузки (через кнопочный пульт). Для автоматического управления (по программе) надо выходными цепями контроллера выполнить те же функции, которые выполняли управляющие кнопки.
Быстродействие контактора при включении и выключении достаточно высокое для того, чтобы утверждать: длительность сигналов управления через кнопки Пуск и Стоп может быть небольшой.
По потребностям управления нужны один замыкающий и один размыкающий контакты. Если управляющее устройство такими контактами располагает, то, для перехода с ручного управления (через кнопки) на автоматическое, надо заменить кнопку Пуск замыкающим контактом, а кнопку Стоп – размыкающим.
Если в наборе выходных средств контроллера нет размыкающего контакта, его можно организовать применением промежуточного реле. Контроллер своим замыкающим контактом включит обмотку реле, а размыкающие контакты этого реле - разорвут цепь обмотки контактора. Мера, конечно, вынужденная, но она легко реализуемая.Б
Схема одного из типов реле приведена на рис. 3.21.

Б
Рис. 3.21
Б
При подключении выводов “с “ - “д“ обмотки к источнику питания по обмотке потечёт ток; пропорционально квадрату ампервитков ( I • w )2 , где w – число витков обмотки, создаётся электромагнитное усилие, заставляющее якорь 10 притянуться к сердечнику 12. Поворачиваясь по часовой стрелке, якорь своей левой консолью переместит вверх штифт 4, что, в свою очередь, приведёт к размыканию нормально замкнутой контактной пары 7 – 8. Таким образом, каждое срабатывание реле будет вызывать размыкание контактов на линии “а “ - “б “.
Чтобы теперь обеспечить и включение, и выключение нагрузки через контактор от контроллера, надо выполнить следующее. Подключить выход Q1 контроллера (рис. 3.22) вместо кнопки ПУСК – этим достигается возможность включения нагрузки. Выключение нагрузки станет возможным, если выводы “а“ - “б “ контактной группы реле подключить вместо кнопки СТОП, а обмотку реле ( выводы “с” – “д") включить последовательно через выходной контакт Q2 контроллера с питанием от источника напряжения, соответствующего паспортным характеристикам реле.
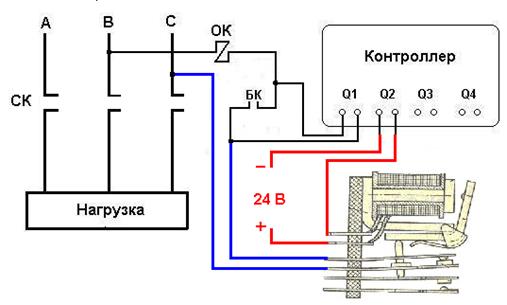
Рис. 3.22
Ранее говорилось, что для срабатывания и отпускания контактора достаточно коротких импульсов. В указываемой ниже программной реализации переключения контактора (рис. 3.23) эту длительность (500ms) задают блоки ONE SHOT с номерами B 09 и B 04. Под сигналом I 02 предполагается дискретный выход того блока программы, который управляет состоянием выхода. Оба выхода контроллера при такой реализации включаются на короткие промежутки времени, от источников питания потребляется минимальный ток, ни один из компонентов схемы не перегревается. Поддержание контактора в замкнутом состоянии СК обеспечивается питанием ОК от силовой сети переменного тока через блокирующий контакт БК.
Необходимую длительность импульсов включения и выключения нагрузки от контроллера обеспечивает использование в его программе двух блоков ONE SHOT.
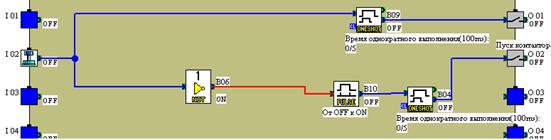
Рис. 3.23
15. Блок  - ПИД – регулятор. Даже в контроллерах, относящихся к рассматриваемой в данной работе «лёгкой группы», в некоторых типах (Alpha – 2, например) предусмотрена возможность управления процессом на основе любого из применяющихся в настоящее время видов регулирования. Применение этого блока хорошо согласуется с применением блока PWM, а также с наличием у некоторых контроллеров транзисторных выходных цепей, которые позволяют передавать с контроллера выходные управляющие объектом сигналы в виде плавно регулируемых воздействий.
- ПИД – регулятор. Даже в контроллерах, относящихся к рассматриваемой в данной работе «лёгкой группы», в некоторых типах (Alpha – 2, например) предусмотрена возможность управления процессом на основе любого из применяющихся в настоящее время видов регулирования. Применение этого блока хорошо согласуется с применением блока PWM, а также с наличием у некоторых контроллеров транзисторных выходных цепей, которые позволяют передавать с контроллера выходные управляющие объектом сигналы в виде плавно регулируемых воздействий.
Необходимо отметить, что описательный материал, данный по назначению, “работе” и применению некоторых функциональных блоков среды программирования Alpha – Programming не исчерпывает её функциональных возможностей. Чтобы не перегружать содержание анализом всего набора функциональных блоков, не рассмотрены важные и очень полезные при составлении программ блоки, допускающие программирование случайных событий. Не рассмотрены блоки, позволяющие передавать сигналы оповещения и диспетчеризации через коммуникационные модемы; не упоминались модули расширения, позволяющие объединять датчики и исполнительные устройства в сетевые структуры на базе AS – интерфейса, а также подключать к контроллерам датчики с ненормированными выходными сигналами (например, термометры сопротивления).
Дадим два примера программирования на Alpha Programming.
Дата добавления: 2016-07-29; просмотров: 2703;
Поиск по сайту
Узнать еще
- A ... метка (без метки) на шатуне (стрелка) для 26.20b Измерение внутреннего диаметра
- A Отсоедините внешние масло ... и этот болт на картере 5.14 Отсоедините болт заземления
- A. Повышение температуры кипения
- A. Трубопроводная обвязка окружения испарителя.
- AIP – ИЗМЕРЕНИЕ И ПРЕДОСТАВЛЕНИЕ СВЕДЕНИЙ ОБ ЭФФЕКТИВНОСТИ ТОРМОЖЕНИЯ
- Andante cantabile con espressione В. Моцарт. Соната для ф-п. № 8, ч. II
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- Applications (приложения)

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
