ТЕМА 2.5. ХОДКОСТЬ СУДНА И ЕГО ДВИЖИТЕЛИ.
ХОДКОСТЬ.
Способность судна двигаться в окружающей среде с заданной скоростью при определенной мощности главных двигателей и соответствующем движителе называется ходкостью. Судно движется на границе двух сред — воды и воздуха. Поскольку плотность воды примерно в 800 раз больше плотности воздуха, то и сопротивление воды значительно больше воздушного сопротивления.
Сила сопротивления воды состоит из сопротивления трения, сопротивления формы, волнового сопротивления и сопротивления выступающих частей.
Вследствие вязкости воды между корпусом судна и ближайшими к корпусу слоями воды возникают силы трения, на преодоление которых затрачивается часть мощности главного двигателя. Равнодействующая этих сил называется сопротивлением трения RT. Сопротивление трения зависит также от скорости, от смоченной поверхности корпуса судна и от степени шероховатости. На величину шероховатости влияет качество окраски, а также обрастание подводной части корпуса морскими организмами. Чтобы сопротивление трения по этой причине не увеличилось, судно подвергают периодическому докованию и очистке подводной части. Сопротивление трения определяют расчетным путем.
При обтекании корпуса судна вязкой жидкостью происходит перераспределение гидродинамических давлений по его длине. Равнодействующая этих давлений, направленная против движения судна, называется сопротивлением формы RФ. Сопротивление формы зависит от скорости судна и от его формы. При плохо обтекаемой форме в кормовой части судна образуются вихри, что приводит к понижению давления в этом районе и увеличению сопротивления формы судна.
|
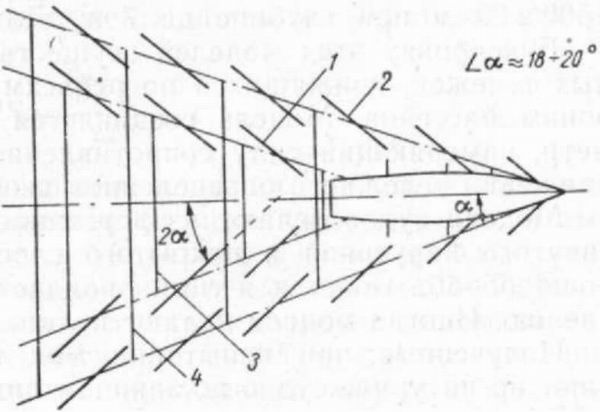
Рис. 171. Система волн, возникающих при движении судна. 1, 2 — расходящиеся кормовые и носовые соответственно; 3, 4 — поперечные носовые и кормовые соответственно.
Волновое сопротивление RВ возникает из-за образования волн в зонах повышенного и пониженного давления при движении судна. На волнообразование также расходуется часть энергии главного двигателя. Волновое сопротивление зависит от скорости судна, формы его корпуса, а также от глубины и ширины фарватера.
Сопротивление выступающих частей RВЧ зависит от сопротивления трения и от формы выступающих частей (рулей, скуловых килей, кронштейнов гребных валов и пр.). Сопротивление формы и волновое объединяются в остаточное сопротивление, которое можно рассчитать только приближенно. Для точного определения величины остаточного сопротивления проводят испытания моделей судов в опытовом бассейне.
Воздушное сопротивление RВОЗД движению судна можно найти путем продувки надводной части модели в аэродинамической трубе.
Таким образом, полное сопротивление движению судна определяется как сумма отдельных составляющих
R= RФ + RT + RВ + RВЧ + RВОЗД
Это сопротивление называют буксировочным, так как оно равно усилию в тросе, возникающему при буксировке судна.
Мощность, необходимая для буксировки судна со скоростью v, называется буксировочной мощностью (кВт или л. с):
EPS = Rv / 102 или EPS = Rv / 75,
где R — полное сопротивление, Н или кГс; v — скорость судна м/с.
Мощность на фланце главного двигателя больше буксировочной, так как при ее определении необходимо учитывать пропульсивный коэффициент η (η=ηPηK, где ηP — коэффициент полезного действия движителя, а ηK — коэффициент влияния корпуса), КПД редуктора ηРЕД, КПД валопровода ηВ (опорных и упорных подшипников) или других специальных передач:
Ne=EPS /η ηРЕДηВ
Следует отметить, что скорость судна на волнении уменьшается. Поэтому на некоторых судах мощность двигателя увеличивают с целью получения заданной скорости на определенном волнении.
СУДОВЫЕ ДВИЖИТЕЛИ.
Движителями называются специальные устройства, преобразующие механическую работу судовой силовой установки в упорное давление, преодолевающее сопротивления и создающее поступательное движение судна. На судах в качестве движителей применяются: гребные винты, крыльчатые движители и водометные движители. Находят применение также паруса, гребные колеса и другие движители. По принципу действия движители разделяют на активные, к которым относят паруса, непосредственно преобразующие энергию ветра в поступательное движение судна, и реактивные — все остальные, так как создаваемое ими упорное давление получается в результате реакции масс воды, отбрасываемой в сторону, противоположную движению судна. Наиболее распространенными благодаря простоте устройства и работы, компактности, надежности в эксплуатации и наибольшему коэффициенту полезного действия являются гребные винты. В зависимости от конструкции их подразделяют на два типа: цельные винты (ступица с лопастями изготовляется совместно) и винты со съемными лопастями , применяемые на судах, плавающих во льдах. Такие винты называются винтами фиксированного шага, а винты, имеющие механизмы, поворачивающие лопасти в ступице и изменяющие шаг винта, называются винтами регулируемого шага. Шагом винта называется путь в направлении оси, который проходит любая точка поверхности винта за один его оборот. Гребные винты фиксированного шага — ВФШ (рис. 172) изготовляют цельными (одной деталью), литыми, сварными или штампованными, и они состоят из следующих основных элементов: ступицы, представляющей собой втулку, наезживаемую на конус шейки гребного вала, и лопастей (от 3 до 6), радиально расположенных на ступице. Нижняя часть лопасти, соединяющая ее со ступицей, называется корнем лопасти; верхняя часть — вершиной или концом; поверхность лопасти, обращенная в сторону корпуса судна, носит название засасывающей поверхности, обратная поверхность — нагнетающей, которая в большинстве случаев представляет собой правильную винтовую поверхность. Пересечение этих двух поверхностей образует кромки лопастей.
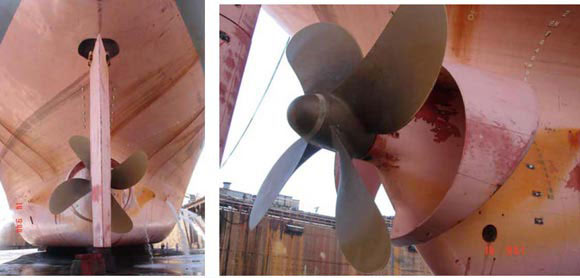
Рис. 172. Четырехлопастной гребной винт фиксированного шага.
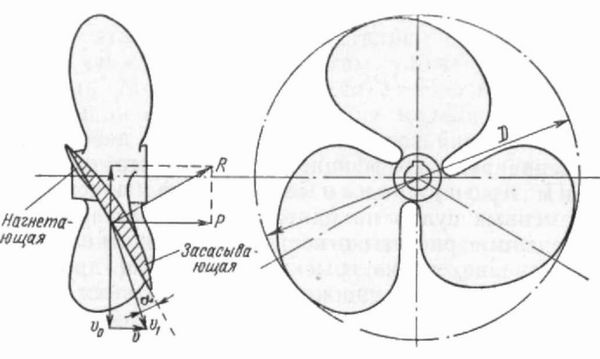 Рис. 173. Гребной винт фиксированного шага (ВФШ) и схема создания упорного давления элементарной площадкой лопасти винта.
Рис. 173. Гребной винт фиксированного шага (ВФШ) и схема создания упорного давления элементарной площадкой лопасти винта.
Диаметром гребного винта D называется диаметр окружности, описанной вершиной лопасти. Диаметр винта крупных судов доходит до 6,0 м и более. Применяют гребные винты правого и левого вращения, их различают по общим правилам: если винт завинчивается вращением по часовой стрелке, то он называется винтом правого вращения, а если против часовой стрелки — винтом левого вращения. При вращении винта его лопасти отбрасывают массы воды в одну из сторон. Реакция этой воды воспринимается нагнетающей поверхностью лопасти, создающей упор винта, который через ступицу и гребной вал передается на упорный подшипник, преобразуясь в силу, движущую судно. Чтобы понять, как возникает упорное движение при вращении винта, рассмотрим те силы, которые действуют при этом на элементарной площадке его лопасти, двигающейся по окружности со скоростью v0 И одновременно перемещающейся вместе с судном со скоростью v1. Угол а, образовавшийся между результирующей этих сил v и хордой рассматриваемой элементарной площади лопасти, будет углом атаки, создающим на ней подъемную силу R. Если разложить эту силу на составляющие, то одна составляющая —сила Р, действующая по направлению движения судна, и будет силой-упора, а вторая—сила T, действующая по окружности в сторону, обратную вращению винта, создает момент относительно его оси, который преодолевается судовым двигателем.
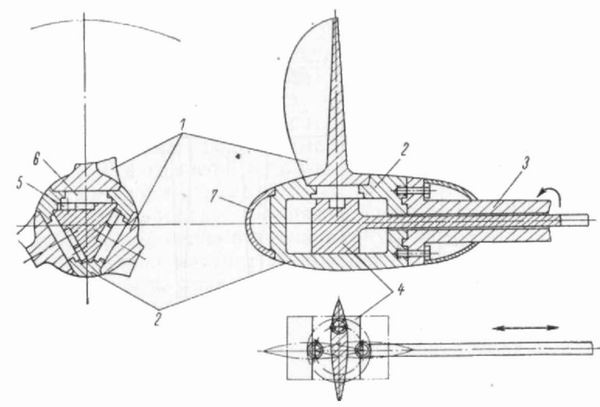 Рис. 174. Гребной винт регулируемого шага (ВРШ) с поворотношатунным механизмом изменения шага. 1 — лопасти винта; 2— ступица; 3— гребной вал; 4 — ползун со штангой; 5 — палец шатуна; 6 —подшипник лопастной заделки; 7 — обтекатель винта.
Рис. 174. Гребной винт регулируемого шага (ВРШ) с поворотношатунным механизмом изменения шага. 1 — лопасти винта; 2— ступица; 3— гребной вал; 4 — ползун со штангой; 5 — палец шатуна; 6 —подшипник лопастной заделки; 7 — обтекатель винта.
Гребной винт регулируемого шага (ВРШ) имеет конструкцию, обеспечивающую поворот лопастей в ступице во время работы винта на ходу судна из поста управления, расположенного в рубке. При повороте лопастей, осуществляемом механизмом по многообразным кинематическим схемам (одна из которых—поворотно-шатунная—приведена на рис. 174), изменяется шаг винта, отчего изменяется и величина создаваемого им упора, увеличивающего или уменьшающего скорость хода, и направление движения судна, при этом число оборотов, мощность главной машины и направление ее вращения остаются неизменными. Использование винтов регулируемого шага допускает применение на судах нереверсивных главных машин с упрощенной системой обслуживания, что сокращает износ их цилиндров примерно на 30—40% (возникающий у реверсивных машин от частого изменения режима работы и направления вращения), позволяет полнее использовать мощность машин и поддерживать высокое значение к. п. д. винта. Суда с ВРШ обладают гораздо более высокими маневренными качествами, чем суда с ВФШ.
Винт регулируемого шага (ВРШ) — это гребной винт, у которого регулируется угол разворота лопастей. Лопасти такого винта разворачиваются специальным механизмом в любое положение в диапазоне «полный вперед — стоп—полный назад», т. е. в зависимости от степени разворота лопастей, не изменяя работы главного двигателя, судну можно придать или движение вперед, или остановиться на месте, или создать движение назад.
При эксплуатации всех видов ВРШ применяется принципиально одинаковая система управления. Гидравлическая система управления ВРШ дает возможность широко использовать в качестве главного двигателя нереверсивные силовые установки (турбины, дизели большой мощности и т. д.).
Внедрение ВРШ на судах позволяет улучшить маневренные качества судов. К ним в первую очередь относится уменьшение тормозного пути (за счет быстрого перевода лопастей винта на режим работы заднего хода) и периода торможения. Гашение инерции начинается почти немедленно после дачи команды «Полный назад» (отдельные суда с полного хода останавливаются за 1 мин при тормозном пути 1—1,5 корпуса). На судах с ВРШ облегчается выполнение многих видов маневров при съемке с якоря и постановке на якорь, при швартовке судна к причалу и лагом к другому судну, при расхождении судов для предотвращения столкновений и т. д.
Суда с ВРШ обладают гораздо более высокими маневренными качествами, чем суда с ВФШ.
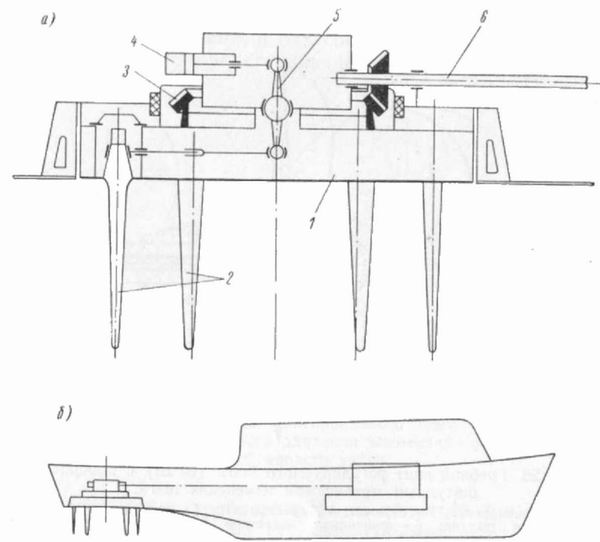
Крыльчатый движитель (рис. 175) представляет собою конструктивное устройство, состоящее из горизонтально вращающегося цилиндра с вертикально расположенными на нем 6—8 лопастями мечевидной, обтекаемой формы, поворачивающимися вокруг своих осей маятниковым рычагом, управляемым из рулевой рубки.
|
Рис. 175. Крыльчатый движитель: а — конструктивная схема; б — размещение движителя на судне. 1 — несущий диск; 2 — поворотные лопасти; 3 — ведомая шестерня, приводящая во вращение диск; 4 — гидравлическое устройство управления маятниковым рычагом; 5 — маятниковый рычаг, изменяющий положение лопастей вокруг своей оси; 6 — гребной вал с ведущей конической шестерней.
При вращении диска на лопастях, как на крыле, возникает подъемная сила, составляющая которой создает упорное давление. При повороте лопастей изменяется величина упора и его направление, что дает возможность варьировать направление движения судна без помощи руля (на судне с этим движителем руль не устанавливается), а также величину упора движителя от «Полного вперед» до «Полного назад» или останавливать судно, не изменяя скорости и направления вращения (без реверса) главной силовой установки. К. п. д. крыльчатого движителя почти равен к. п. д. гребного винта, но крыльчатый движитель значительно сложнее по конструкции. Выступающие лопасти часто ломаются. Однако в последнее время этот движитель находит все более широкое применение, обеспечивая судам хорошую маневренность, позволяющую им свободно работать в узкостях.
Водометный движитель относится к серии водопроточных движителей. Современные водометные движители делают трех типов: с выбросом водяной струи в воду, в атмосферу и с полуподводным выбросом. Гребной винт работает как насос, засасывающий воду в канал через трубу, проходящую в днище корпуса впереди винта. Для защиты от попадания на винт посторонних предметов в начале канала укрепляется защитная решетка. Для уменьшения потерь от закручивания гребным винтом водного потока и повышения к. п. д. движителя за винтом устанавливается контрпропеллер. Направление хода судна изменяется перекладкой реверс-руля. Коэффициент полезного действия такого движителя составляет только 35—45%, а отсутствие всяких выступающих частей в подводной части судна обеспечивает ему большую проходимость на мелководье, в узкостях и на засоренных фарватерах. Для судна с таким движителем не являются препятствием даже плавающие предметы, через которые оно свободно переходит. Перечисленные преимущества водометного движителя сделали его применение особенно удобным на речных судах, в первую очередь на лесосплаве. В последние годы водометные движители стали применяться и на быстроходных судах, таких, как суда на подводных крыльях, развивающие скорость хода до 95 км/час. Использование современных паровых и газовых турбин позволяет успешно применить водометные движители на крупных морских судах, где по расчетам пропульсивный к. п. д. может достичь около 83%, что на 11% выше пропульсивного коэффициента гребного винта, запроектированного для того же судна. К недостаткам судов с этим движителем следует отнести потери судном грузоподъемности на величину веса прокачиваемой воды и потери объема внутренних помещений, занимаемого каналом.
Вопросы и задания для самоконтроля:
Что вы понимаете под судовыми движителями?
Что называется шагом винта?
Что называется х о д к о с т ь ю?
Что называется с и л о й д а в л е н и я?.
Что определяет с о п р о т и в л е н и е д а в л е н и я?
Что называется с о п р о т и в л е н и е ф о р м ы?
Что называется в о л н о в о е с о п р о т и в л е н и е?
Что называется сопротивлением выступающих частей?
Что означает в о з д у ш н о е с о п р о т и в л е н и е?
Что означает о с т а т о ч н о е с о п р о т и в л е н и е?
Что означает т у р б у л е н т н ы й р е ж и м?
Дата добавления: 2020-11-18; просмотров: 754;
Поиск по сайту
Узнать еще
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- B) в угле Интинского месторождения и продуктах его сжигания.
- B). Система относительных координат.
- DSM — система классификации Американской психиатрической ассоциации
- I. Государственный бюджет и его структура. три состояния государственного бюджета.
- I. Математические понятия
- I. Общая характеристика категории состояния как часть речи

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
