Принцип регулирования по ошибке (по отклонению)
Это самый широко применяемый принцип, обладает многими достоинствами. Может применяться во всех системах (как и предыдущий принцип).
Изобразим структурную схему САР, в которой используется принцип. Рассмотрим на примере стабилизации.
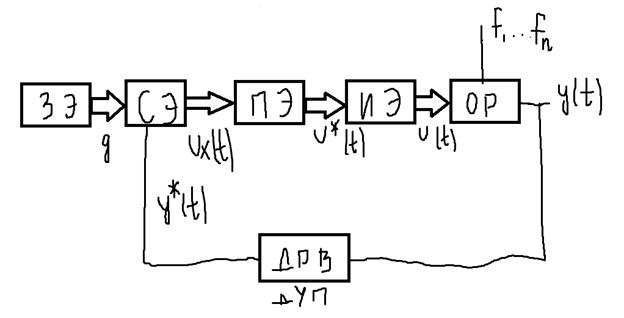
Ошибка и отклонение связаны между собой, как видно. Обратные величины.
Для идеального ДРВ математическая модель имеет следующий вид:

Для идеального СЭ схема будет такая:

Теперь управляющее устройство состоит из двух элементов – сравнивающего элемента и преобразовательного элемента.
Для этой системы g(t) = const.
f1 и f2 приблизительно const во время работы, чтобы обеспечивать требуемое значение выходной величины. Пример – у профессионального магнитофона 5 скоростей записи, выбираем что-либо из них.
В паспортных данных задают диапазон возмущающих воздействий f1min-f1max, f2min-f2max.
Теперь надо изменить модель объекта регулирования.
Установившийся режим – статический.
Построим структурную модель для установившегося режима, а точнее для статического режима.
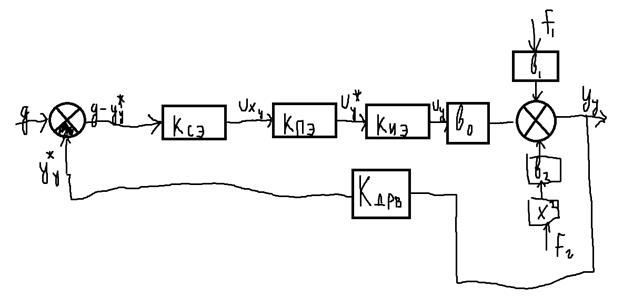
Для статического режима:
 (1.19)
(1.19)
Это уравнение статики. Коэффициенты постоянные.
Рассмотрим статическую ошибку.

yтр задано и является постоянным. Надо рассчитать yy.
Хоть и имеется возведение в квадрат, всё равно применим принцип суперпозиции. Применим его.
Есть 4 составляющих.

09.10.2012

Разомкнутая САР – размыкание мысленное. На входе этой системы размыкается ОС и в качестве входной величины рассматривается задающее воздействие, а выходной величиной рассматривается сигнал на выходе датчика. Тогда если известно задающее воздействие g(t), то выход находится простым перемножением с коэффициентом передачи (этот коэффициент служит, чтобы находить амплитуду выходного сигнала, если задана амплитуда входного сигнала).

Из определения видно, что данная система является статической. Сие можно доказать.
1) Допустим, что f1 = f11 = const. f2 = f21 = const. При этом yуст = yтр.
2) Даём положительное приращение Δf1. В этом случае уже f12 = f11 + Δf1. f2 = f21 неизменно. Значит, yу увеличится. Возникнет статическая ошибка (разница между требуемым и установившимся значениями не станет нулевой, она станет меньше нуля). Всё, доказали.
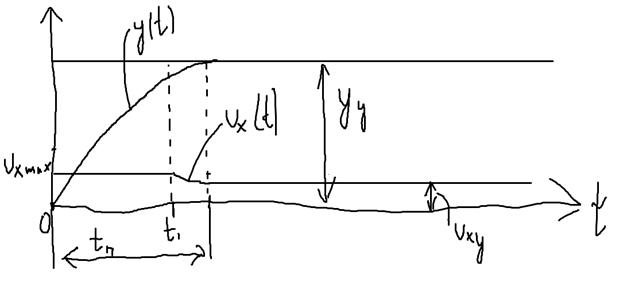
Рассмотрим переходной процесс, работу этой системы в переходном режиме.
В момент включения в работу системы допустим, что y = 0. Тогда сигнал на выходе датчика будет равен тоже нулю. А чему будет равен сигнал ошибки?
Допустим, что g = g0. Таким образом, x = g0*КСЭ. Таким образом, получается большой сигнал ошибки. На практике этот сигнал обычно ограничивают (стабилитроны etc), чтобы в первый момент времени не возникали больше токи и так далее. Но всё равно сразу же к двигателю (если двигатель) будет приложено достаточно большое напряжение, и двигатель будет разгоняться с большим ускорением (это хорошо, за счёт этого сокращается время переходного процесса). С ростом регулируемой величины сигнал на выходе датчика возрастает, а сигнал ошибки начинает уменьшаться. Этот сигнал ошибки сначала неизменен, а наступая с определённого момента t1 этот сигнал будет максимальным.
g выбирают, исходя из того, чтобы при f1 = f1 сред и f2 = f2 сред выполнялось равенство yy = yтр.
Берут средние, потому что таким образом осуществляется настройка.
Выведем формулу статической ошибки xст = F(f1, f2).
Надо знать конкретное значение g.
Вспоминаем формулу 1.21:
Подставим её вместо yтр, вместо f1 f1 сред, вместо f2 f2 сред (сделать дома).
Надо найти статическую ошибку xст = yтр - yуст.

Подставим 1.22 в формулу xст.

fср находится с использованием паспортных данных (где заданы максимальное и минимальное значения возмущающих воздействий).
Если бы не было ОС, то был бы только числитель (по задающему воздействию).
Достоинства:
1) САР реагирует на изменение любого возмущения и параметра преобразовательного элемента, исполнительного элемента и объекта регулирования (в регулировании по возмущению ограниченное число датчиков). Остальные коэффициенты упущены, потому что ключевые элементы – преобразовательный, исполнительный, объект регулирования.
2) В статических системах автоматической стабилизации статическую ошибку можно уменьшить до допустимого значения путём увеличения коэффициента передачи разомкнутой САР.
Недостаток:
1) САР склонна к неустойчивости (к расходящимся процессам). Пояснение: используется отрицательная обратная связь. Надо спроектировать, чтобы она была на всех частотах. Но стоит только появиться положительной обратной связи, образуется генератор. Раскачка пойдёт от возмущений, пульсаций, помех. Этого недостатка нет в предыдущих двух принципах регулирования. Чем больше Кр, тем больше вероятность, что система будет неустойчивой.
16.10.2012
Дата добавления: 2020-10-25; просмотров: 715;
Поиск по сайту
Узнать еще
- I. Понятие о принципах обучения, их взаимосвязь.
- III триместр беременности (поздний плодный период)
- III. Общий принцип сочетания методов в процессе обучения.
- III. Части речи и принципы их классификации
- IV. Критерии и принципы обеспечения безопасности
- IV. Основные принципы этикета государственного служащего
- IV.2. Несущая способность (потенциальная емкость)
- VIII. Принципы развивающего обучения.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
