Состав оборудования системы «Трасса» и принцип работы навигационного вычислителя
В состав оборудования системы «Трасса» входят следующие основные устройства и приборы (рис. 20.1):
1. Доплеровский измеритель путевой скорости и угла сноса (ДИСС).
2. Автоматическое навигационное устройство (АНУ); его называют также навигационным вычислителем.
3. Датчик курса.
4. Датчик воздушной скорости.
5. Задатчик угла карты.
6. Указатель угла сноса и путевой скорости.
7. Счетчик координат.
Доплеровский измеритель путевой скорости и угла сноса непрерывно измеряет путевую скорость и угол сноса и выдает эти данные на указатель. Одновременно с этим значения путевой скорости и угла сноса подаются в навигационный вычислитель, который осуществляет счисление пройденного самолетом пути по осям С (Y) и В (X) в ортодромической системе координат.
Навигационный вычислитель связан с курсовой системой и задатчиком угла карты. При установке на задатчике МУК = ОЗМПУ координатная ось С совмещается с ЛЗП, а координатная ось В располагается перпендикулярно к ней.
Сигналы курса самолета, поступающие от курсовой системы, и сигналы угла сноса, поступающие от доплеровского измерителя, складываются и их сумма сравнивается с ОЗМПУ, установленным на задатчике угла карты.
В основу работы навигационного вычислителя положено автоматическое определение углового бокового уклонения самолета, т. е. решение равенства БУ = (ОМК + УС) — ОЗМПУ.
Если сумма курса и угла сноса равна ОЗМПУ, то вектор путевой скорости самолета совмещен с координатной осью С. Если это равенство
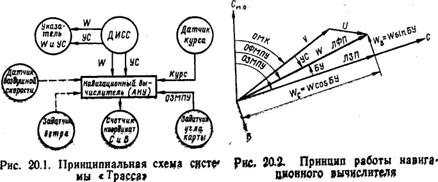
не обеспечивается, то вектор путевой скорости раскладывается навигационным вычислителем на две составляющие. Одна из них Wc направлена по направлению ЛЗП, а другая WB — перпендикулярно к ЛЗП (рис. 20.2). Суммирование углов и разложение вектора путевой скорости на составляющие по осям С и В происходит непрерывно электромеханическим способом.
Полученные составляющие Wc и WB интегрируются по времени специальными моторчиками, которые и выдают на счетчик координат текущие значения координат места самолета в виде пройденного пути по ортодромии и линейного бокового уклонения.
Дата добавления: 2019-02-08; просмотров: 892;
Поиск по сайту
Узнать еще
- Cпецифика логопедической работы в остром периоде
- E) Расчет структурных составляющих очага деформации с одним нейтральным сечением
- F45.38 другие органы или системы
- H. Разработка мер по повышению качества работы органа здравоохранения
- I. История возникновения и развития классно-урочной системы.
- I. Понятие о принципах обучения, их взаимосвязь.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
