Расчет маховика по методу Н. И. Мерцалова
Способ Мерцалова основан на определении кинетической энергии всех звеньев механизма и последующем выделении из этой кинетической энергии той ее части, которая приходится только на звено приведения вместе с маховиком. Расчет момента инерции маховика выполняется графоаналитическим методом в предлагаемой последовательности.
1. По заданной индикаторной диаграмме или графику изменения сил полезных сопротивлений, приведенных в задании, производится расчет приведенного момента Мпр сил полезных сопротивлений в зависимости от угла поворота кривошипа, Мпр =f (j) для одного цикла работы механизма.
Для двухцилиндровых ДВС и компрессоров момент Мпр определяется по формуле
 , (5.26)
, (5.26)
где  и
и  – соответственно сила давления газов на поршень 3 и его скорость в положении j;
– соответственно сила давления газов на поршень 3 и его скорость в положении j;
 и
и  – соответственно сила давления газов на поршень 5 и его скорость в положении j.
– соответственно сила давления газов на поршень 5 и его скорость в положении j.
В выражении (5.26) ставится знак «плюс» при совпадении направлений силы давления и скорости, а «минус» – когда они противоположны. Результаты определения Мпр= f(j) удобно представлять в форме табл.5.4.
Т а б л и ц а 5. 4. Расчет приведенного момента сил
| Положение кривошипа | р3, Н/м2 | Р3, Н | V3*,м | Р3V3*, Н×м | Р5, Н/м2 | Р5, Н | V5*,м | Р5V5*, Н×м | Мпр, Н×м |
| . . |
Для механизмов рабочих машин приведенный момент сил полезного сопротивления определяется по формулам
 ; (5.27)
; (5.27)
 , (5.28)
, (5.28)
где  – сила полезного сопротивления для положения j, Н;
– сила полезного сопротивления для положения j, Н;
 – сила тяжести i-го звена, Н;
– сила тяжести i-го звена, Н;
 – вертикальная составляющая скорости центра тяжести звена к, определяемая из плана скоростей для каждого положения, м.
– вертикальная составляющая скорости центра тяжести звена к, определяемая из плана скоростей для каждого положения, м.
В выражениях (5.27) и (5.28) ставится знак «минус», так как направление вектора силы противоположно направлению вектора скорости. Момент сил тяжести положителен, если центр масс звена опускается вниз, и отрицателен при движении звена вверх.
Зависимость (5.28) применяется при определении Мпр для механизмов, у которых вес звеньев сравним с силой Рпс и центры тяжести последних перемещаются по вертикальным направлениям или близко к ним (глубинные насосы, вертикальные штампы, прессы и др.).
2. Данные расчета сводятся в табл. 5.4 и строится график Мпр= f (j). Общий вид диаграммы приведенного момента сил полезных сопротивлений одноступенчатого компрессора, построенной в масштабе μм, представлен на рис. 5.5, а.
3. Приводится расчет масштаба μА работ и подробное описание построения графика работ движущих сил Адс= f (j) методом графического интегрирования диаграммы Мпр= f (j). В рассматриваемом примере диаграмма работ сил полезного сопротивления построена методом графического интегрирования диаграммы Мпр= f (j) по методу хорд (рис. 5.5,а). Для этого ось ОХ разбиваем на ряд равных участков 0–1, 1–2, 2–3 и т.д. Внутри каждого участка переменный момент заменим средним его значением. Для этого проведем горизонтальные отрезки внутри каждого участка 0–1, 1–2, 2–3 с ординатой, изображающей среднее значение приведенного момента так, чтобы площади выступающих и входящих углов (на рис.5.5,б заштрихованные площадки) были равными. Ординаты полученных средних моментов сносим на ось О–Мпр и соединяем лучами р –I (например, р –6) с полюсом р, взятым на расстоянии Н (мм) от начала координат. В системе осей А–Оj из точки О на соответствующих участках проводим отрезки, параллельные лучам (р–j), например, 5–6. Соединив плавной кривой вершины ломаной линии, получим график работы А = f (j). Масштаб полученного графика находим по формуле
μА = μм μφ Н,(5.29)
где μм– масштаб приведенных моментов, Н×м/мм;
μφ – масштаб угла поворота кривошипа, рад/мм;
Н– полюсное расстояние, мм.
4. Учитывая то, что за цикл установившегося движения работа сил сопротивления равна работе движущих сил, и принимая для механизмов рабочих машин момент движущих сил Мдс = const, а для двигателей – момент сил сопротивления Мс = const, соединяют начало координат графика работ с его концом прямой линией ОС. Она и представляет собой график работ движущих сил для рабочей машины или сил сопротивления для двигателей внутреннего сгорания (см. рис.5.5, б).
5. Графически вычитая из ординаты работ движущих сил ординаты работ сил сопротивления, строят график избыточной работы ΔА= f (φ). Описывается построение этого графика. График изменения избыточной работы кривошипно-шатунного механизма одноступенчатого компрессора за цикл установившегося движения представлен на рис.5.3, в.
6. По зависимостям (5.11), (5.12) и (5.13) подсчитывается кинетическая энергия каждого звена механизма для 12 положений (табл.5.5).
7. По полученным данным кинетической энергии отдельных звеньев подсчитывается кинетическая энергия всего механизма для каждого из 12 его положений по зависимости
 , (5.30)
, (5.30)
где  – кинетическая энергия i-го звена в j-м положении.
– кинетическая энергия i-го звена в j-м положении.
8. По данным табл.5.5 строится график изменения кинетической энергии механизма Тзв= f (j). Масштаб mТ графика Тзв= f (j) по оси ординат принимается равным масштабу графика работ, т.е. mт = mА.
Общий вид диаграммы изменения кинетической энергии звеньев кривошипно-шатунного механизма показан на рис. 5.5,г.
Т а б л и ц а 5.5. Определение кинетической энергии механизма
| Положение кривошипа | Значения кинетических энергий звеньев механизма | |||||
| Т1 | Т2 | Т3 | Т4 | Т5 | ТΣ | |
| . . . |
9. По методу графического вычитания строится график DА–Тзв= =f(j). Наибольший размах DУmax (рис 5.5,д) по оси ординат графика DА–Тзв = f(j) определяет максимальную величин изменения кинетической энергии массы моховика за цикл работы механизма:
DТmax =DУmax ×mм. (5.31)
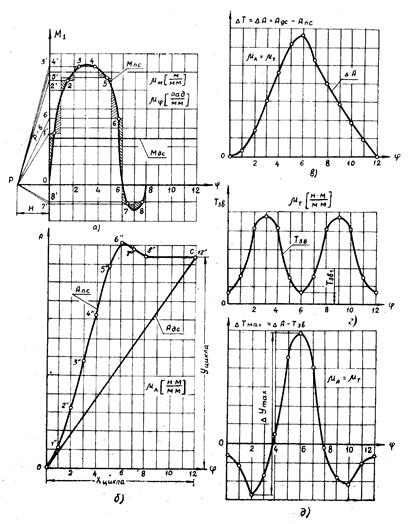
Рис. 5.5. Диаграммы расчета маховика по методу Мерцалова:
а – приведенных моментов; б – работ сил полезных сопротивлений;
в – избыточной работы; г – кинетической энергии; д – энергии маховика.
10. Момент инерции маховика определяется по формуле
 (5.32)
(5.32)
где d – коэффициент неравномерности движения;
wср – средняя угловая скорость вала, с–1.
11. Производится описание последовательности расчета размеров маховика и его массы.
Маховики выполняются в виде отдельных стальных дисков или в виде чугунных ободов со спицами и ступицей. Последние применяются на тихоходных приводах различных машин с окружной скоростью на ободе, не превышающей 30 м/с. Диаметр маховика в виде сплошного диска рассчитываем по формуле
 , (5.33)
, (5.33)
где r – плотность материала маховика, кг/м3;
b = b/DM = (0,08...0,15) – отношение ширины маховика к его диаметру. Диаметр маховика должен находится в пределах Dм = (6 –10 r1).
Средний диаметр обода маховика со спицами находится по зависимости
 , (5.34)
, (5.34)
где r – плотность материала маховика, кг/м3,
b = b/DСР= (0.08...0.15) – отношение ширины обода к его диаметру,
x = h/Dcp= (0,8 ...0,12) – отношение толщины обода к его диаметру.
Определяется масса маховика, его вес и маховый момент. Общая масса маховика в виде обода m = 1,3 mобода .
Расчет эффективной мощности двигателя или полезной мощности рабочей машины. Мощность, снимаемая с вала двигателя, или мощность, затраченная на выполнение технологического процесса, определяется по формуле
 , (5.35)
, (5.35)
где УДВ.Ц – значение ординаты графика работы движущих сил или сопротивления в конце цикла, мм;
ХЦ – длина абсциссы, изображающей угол поворота кривошипа за цикл на графике работ, мм;
tЦ – продолжительность цикла, с.
Дата добавления: 2020-10-25; просмотров: 664;
Поиск по сайту
Узнать еще
- E) Расчет структурных составляющих очага деформации с одним нейтральным сечением
- I. Погрешности механической обработки. Точность обработки. Методы их расчёта
- IV. РАСЧЕТ РЕКТИФИКАЦИОННЫХ КОЛОНН
- V. ПРИМЕР РАСЧЕТА ФИЛЬТРА ВЫСОКИХ ЧАСТОТ ЧЕБЫШЕВА
- А) Расчет электрической цепи методом свертывания
- А. Расчет на устойчивость
- АВТОМАТИЗАЦИЯ МЕЖБАНКОВСКИХ РАСЧЕТОВ
- Автоматизация расчета и построения базовых конструкций одежды

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
