Загальні відомості. Види кулачкових механізмів
За допомогою шарнірно-важільних механізмів багато законів руху та траєкторій точок вихідних ланок отримуються лише досить приблизно, а деякі і зовсім неможливі. Значно більші можливості для виконання заданих законів руху мають механізми з вищими парами. Перш за все, це відноситься до кулачкових механізмів. За допомогою кулачкових механізмів можна отримати практично будь-який закон руху, при цьому - меншим числом ланок, ніж у випадку застосування механізмів з нижчими парами.
Кулачкові механізми застосовують, коли необхідно, щоб рух вихідної ланки виконувався точно у відповідності до заданого закону; був узгоджений з рухом інших механізмів; при цьому, можна забезпечити тимчасову зупинку (вистій) вихідної ланки при неперервному русі вхідної.
Кулачкові механізми - найпростіші, компактні та надійні механізми для точного виконання складних законів руху.
Недоліком кулачкових механізмів є значний питомий тиск між елементами вищої кінематичної пари і, як наслідок, порівняно велике їх спрацювання.
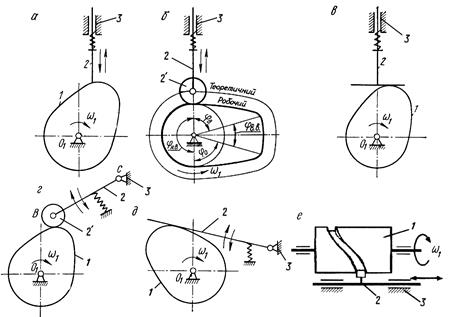
Рис. 6.1
Кулачковий механізм – механізм, до складу якого входить кулачок. Кулачком називається ланка, що утворює вищу кінематичну пару, елемент якої виконаний у вигляді поверхні змінної кривини.
Найпростіший кулачковий механізм являє собою триланковий механізм, що складається з кулачка 1, штовхача (штанги) 2 та стояка 3 (рис. 6.1). Кулачок, як правило, є вхідною ланкою механізму.
Кулачкові механізми поділяються: на плоскі та просторові; за видами руху вхідної та вихідної ланок; за способом замикання вищої пари; за видом елементу вищої пари вихідної ланки.
Найчастіше застосовують кулачкові механізми, в яких кулачок здійснює неперервний обертальний рух. Вихідна ланка переважно виконує зворотно-поступальний або коливальний рух. В останньому випадку вихідна ланка називається коромислом (рис.6.1, г, д).
Ще одним недоліком кулачкових механізмів є необхідність забезпечувати постійне замикання ланок, які утворюють вищу кінематичну пару. Постійний контакт елементів у вищій кінематичній парі може забезпечуватися геометричним замиканням (конструктивно за рахунок ролика у пазу чи охоплюючих роликів і т.ін.), або силовим замиканням (під дією сил пружності, сил ваги, гідравлічних чи пневматичних пристроїв). Завдяки простоті конструкції та меншим габаритам механізмів, найчастіше застосовують силове замикання за допомогою пружин. При структурному аналізі пружину не включають до загального числа ланок.
Вихідна ланка може мати різні форми елементів вищої пари: загострену (зі сферою малого радіуса), тарілчасту (з плоскою, циліндричною або сферичною контактними поверхнями) чи мати проміжну ланку – ролик; загострений штовхач здійснює найточніші переміщення за заданим законом, але швидко спрацьовується. Таку конструкцію застосовують у тихохідних механізмах з малими навантаженнями. Для зменшення втрат на тертя, підвищення стійкості проти спрацювання, надійності та довговічності механізму, між кулачком і штовхачем встановлюють ролик, або використовують тарілчастий штовхач. Встановлення ролика дозволяє частково замінити тертя ковзання тертям кочення.
Роликові вихідні ланки використовують в механізмах, у яких підвищені вимоги до стійкості проти спрацювання. Відмітимо, що в цьому випадку розрізняють два профілі кулачка: центровий (теоретичний) та дійсний (робочий, практичний). Центровий профіль являє собою траєкторію руху центра ролика при обкочуванні його навколо кулачка. Дійсний профіль-обгинну до послідовних положень ролика у тому ж відносному русі. Отже, центрові та дійсні профілі кулачка - еквідистантні (рівновіддалені) криві, відстань між якими, виміряна по нормалі, дорівнює радіусу ролика. Заміна дійсного профілю на центровий дуже зручна при аналізі та синтезі кулачкових механізмів; при цьому характер миттєвого відносного руху всіх ланок механізму не змінюється.
Тарілчастий штовхач (рис. 6.1, в) застосовують, коли у випадках жорстких обмежень габаритних розмірів ролик встановити не вдається. З метою розподілу спрацювання тарілки на більшу поверхню, кінематичну пару “штовхач-напрямна” виконують як циліндричну пару, з можливістю обертання тарілки навколо осі.
Кулачкові механізми можуть бути центральні (вісь штовхача проходить через вісь обертання кулачка), або зі зміщенням осі штовхача в той чи інший бік (з ексцентриситетом, дезаксиальні). Зміщення штовхача дає змогу при однакових інших умовах зменшити габарити механізму та тиск на напрямну.
При всій різноманітності профілів кулачкових механізмів, як правило, на ньому є чотири характерні ділянки, які накреслені (рис. 6.2, а): - радіусом – вектором що зростає (А0 – 6/); - дугою максимального радіуса (6/ - 7/); - радіусом – вектором, що спадає (7/ - 13/); - дугою кола мінімального радіуса r0, яке називають основним (початковим). Рух вихідній ланці передається від кулачка тільки в тому випадку, коли вона дотикається до ділянки профілю змінного радіуса - вектора (ділянки А0 - 6/ та 7/ - 13/ ). Якщо дотик відбувається на ділянці профілю, яка накреслена дугою кола з центром на осі обертання кулачка, то вихідна ланка буде нерухомою (ділянки 6/ - 7/ та 13/ - А0). Відповідно, в загальному випадку за час одного обертання кулачка розрізняють такі фази руху вихідної ланки: віддалення (піднімання; вихідна ланка віддаляється від центра кулачка О1); верхній вистій (далекий вистій, верхня пауза; вихідна ланка нерухома в положенні найвіддаленішого від центра О1); опускання (наближення, повернення; вихідна ланка наближається до центру обертання кулачка); нижній вистій (ближній вистій; вихідна ланка залишається нерухомою у початковому положенні). Кожній з цих фаз відповідає певний кут повороту кулачка  , звичайно
, звичайно  тому кут
тому кут  переважно не задається. Кути повороту кулачка, що визначають відповідні періоди руху штовхача, називають фазовими кутами. Кут повороту кулачка, який дорівнює сумі кутів
переважно не задається. Кути повороту кулачка, що визначають відповідні періоди руху штовхача, називають фазовими кутами. Кут повороту кулачка, який дорівнює сумі кутів  називається робочим кутом профілю.
називається робочим кутом профілю.
В ТММ розглядаються дві основні задачі: аналіз механізмів та синтез механізмів. Аналіз роботи кулачкових механізмів виконується досить рідко, але розгляд методів аналізу полегшує розуміння та розв’язок задач синтезу. Задача синтезу кулачкового механізму полягає в побудові профілю кулачка за відомими законами руху вхідної і вихідної ланок. Проектування кулачкового механізму проводиться в такій послідовності: вибір закону руху вихідної ланки (звичайно, кутову швидкість кулачка приймають сталою); вибір структурної схеми механізму; визначення основних розмірів; побудова профілю кулачка (розрахунок координат профілю). Методи виконання цих етапів можуть бути різні. В конспекті переважно наведені лише традиційні графічні методи.
Рис. 6.2
Дата добавления: 2016-07-22; просмотров: 1657;
Поиск по сайту
Узнать еще
- Інфляція, її види і вимір
- Інфляція: суть, види та наслідки.
- Авіаційна травма та її види. Особливості судово-медичної експертизи та її значення для встановлення причини авіаційної пригоди.
- АНАЛІЗ І ПРОЕКТУВАННЯ КУЛАЧКОВИХ МЕХАНІЗМІВ
- Аналітичне дослідження кінематики плоских важільних механізмів методом замкнутих векторних контурів
- Базові терміни ІС. Види ІТ
- Безробіття, його види та наслідки.
- Бюджетне субсидіювання та його види: субсидії, субвенції, дотації

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
