Силовий розрахунок шарнірно-важільного механізму
Розглянемо графічний метод силового дослідження плоских важільних механізмів шляхом складання рівнянь рівноваги та побудови плану сил. Наведемо розрахунок шестиланкового кулісного механізму поперечно-стругального верстата. Вихідними даними для розрахунку є: кінематична схема механізму в заданому положенні (рис. 3.8); маси mi та моменти інерції ISi ланок; положення їх центрів мас si; кутова швидкість  кривошипа; сила корисного опору, в розглядуваному прикладі FР - сила різання, яка прикладена до різця (ланка 5), в напрямку, протилежному руху.
кривошипа; сила корисного опору, в розглядуваному прикладі FР - сила різання, яка прикладена до різця (ланка 5), в напрямку, протилежному руху.
Невідомими є реакції у кінематичних парах та зрівноважувальна сила Fзр. Оскільки у даному прикладі задано, що верстат з’єднаний з двигуном за допомогою зубчастої передачі  , то зовнішній силовий фактор, який прикладений до зубчастого колеса
, то зовнішній силовий фактор, який прикладений до зубчастого колеса  (ланка 1), являє собою силу, модуль якої треба визначити (напрям та точка прикладання відомі).
(ланка 1), являє собою силу, модуль якої треба визначити (напрям та точка прикладання відомі).
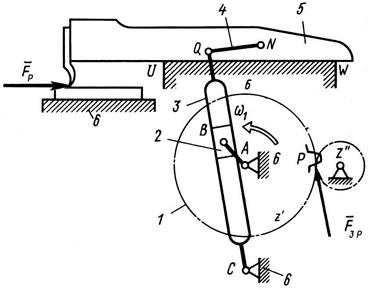
Рис. 3.8
Підкреслимо, що до силового розрахунку приступають лише після виконання кінематичного аналізу. Припустимо, що кінематичний розрахунок виконаний, і, отже, відомі повні прискорення центрів мас усіх ланок та їх кутові прискорення за величиною та напрямком. За знайденими прискореннями визначаємо модулі та напрями головних векторів та головних моментів сил інерції всіх ланок за формулами

Вектори сил інерції  прикладені в центрах мас і напрямлені в протилежну сторону до напрямків векторів відповідних прискорень aSi , моменти МФі напрямлені протилежно до кутових прискорень
прикладені в центрах мас і напрямлені в протилежну сторону до напрямків векторів відповідних прискорень aSi , моменти МФі напрямлені протилежно до кутових прискорень  .
.
Визначимо сили ваги усіх рухомих ланок за рівністю

і прикладемо їх у центрах мас sі ланок вниз по вертикалі.
Розбиваємо механізм на групи Ассура. Даний механізм утворений шляхом послідовного приєднання до механізму І класу (ланки 1,6) двох груп Ассура другого класу: групи третього виду (ланки 2,3) та другого виду (ланки 4,5).
Накреслимо в масштабі найвіддаленішу від вхідної ланки групу Ассура (ланки 4,5) і нанесемо діючі на неї сили: корисного опору Fp, ваги G4, G5, сили (і моменти сил) інерції Ф4, Ф5, МФ4 – усі вони відомі; а також реакції від’єднаних від групи Ассура ланок (рис. 3.9, а). Невідомими є реакції. Реакція стояка на повзун R56 нормальна до напрямної UW. Невідомим є її модуль, а також точка прикладання, яка визначається через плече b. Реакцію в обертальній парі Q, невідому за модулем і напрямом, розкладемо на дві складові  ,
,  так, щоб момент нормальної складової відносно точки N дорівнював нулю. Невідомі модуль та напрям внутрішньої реакції
так, щоб момент нормальної складової відносно точки N дорівнював нулю. Невідомі модуль та напрям внутрішньої реакції  в шарнірі N визначаються пізніше, через план сил.
в шарнірі N визначаються пізніше, через план сил.
Під дією цих сил згідно з принципом Д’Аламбера група Ассура перебуватиме в стані умовної рівноваги.
Складову  знайдемо з умови рівноваги ланки 4, за рівнянням моментів
знайдемо з умови рівноваги ланки 4, за рівнянням моментів  ,
,  ,
,
звідки
 ,
,
де QN, h1, h2 - плечі сил, які вимірюємо на кресленні групи Ассура.
Якщо права частина рівності додатна то це означає, що напрям реакції на схемі прийнято правильно. При від’ємному значенні – потрібно замінити напрям реакції на протилежний.
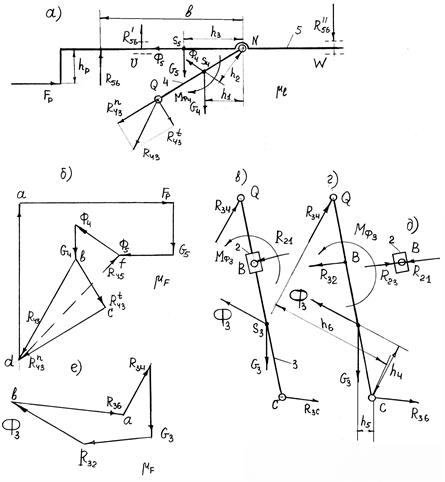
Рис. 3.9
Подальші силові розрахунки проводимо графічним методом. Складаємо векторне рівняння рівноваги сил, прикладених до всієї групи Ассура (4,5):
 ,
,  , (3.5)
, (3.5)
пам’ятаючи, що для системи, яка перебуває в рівновазі, многокутник сил буде замкненим.
Будуємо план сил. Для цього вибираємо масштаб  та вираховуємо відповідні відомим силам довжини відрізків. Потім, починаючи від т.а (рис. 3.9, б), відкладаємо, згідно з рівнянням (3.5), вектори, що зображають ці сили FР, G5, Ф5, Ф4, G4, у масштабі . Після цього через початок вектора, що зображає на плані силу
та вираховуємо відповідні відомим силам довжини відрізків. Потім, починаючи від т.а (рис. 3.9, б), відкладаємо, згідно з рівнянням (3.5), вектори, що зображають ці сили FР, G5, Ф5, Ф4, G4, у масштабі . Після цього через початок вектора, що зображає на плані силу  (т.а), проводимо лінію, паралельну до
(т.а), проводимо лінію, паралельну до  на кресленні групи Ассура, а через кінець вектора, що зображає (т.с) – лінію, паралельну . Точка d перетину цих двох прямих визначить невідомі реакції
на кресленні групи Ассура, а через кінець вектора, що зображає (т.с) – лінію, паралельну . Точка d перетину цих двох прямих визначить невідомі реакції  . Напрям їх приймається таким, щоб стрілки на векторах сил були орієнтовані в напрямку обходу контура. Повну реакцію
. Напрям їх приймається таким, щоб стрілки на векторах сил були орієнтовані в напрямку обходу контура. Повну реакцію  в шарнірі Q отримуємо графічно згідно рівняння
в шарнірі Q отримуємо графічно згідно рівняння  .
.
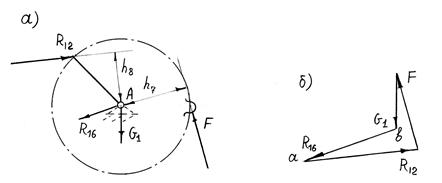
Рис. 3.10
Модулі знайдених реакцій визначаємо за відомими формулами

де  - відрізки на плані сил.
- відрізки на плані сил.
Для визначення реакцій  у внутрішній кінематичній парі N розглянемо умову рівноваги сил, що діють на ланку 4,
у внутрішній кінематичній парі N розглянемо умову рівноваги сил, що діють на ланку 4,

Розв’язок отримуємо, замкнувши на плані сил точки d і f. Модуль реакції дорівнює  .
.
Визначимо координату b точки прикладання реакції  . З рівняння моментів усіх сил, що діють на ланку 5 відносно т. N,
. З рівняння моментів усіх сил, що діють на ланку 5 відносно т. N,  , отримаємо:
, отримаємо:

 .
.
Якщо плече b буде мати таку довжину, що т.D виявиться поза поверхнею UW, то силова дія стояка 6 на повзун 5 зведеться до двох реакцій  ,
,  . Знайдена є тоді лише їхньою рівнодійною. Шукані реакції визначаються за допомогою теореми Варіньона
. Знайдена є тоді лише їхньою рівнодійною. Шукані реакції визначаються за допомогою теореми Варіньона 
Перейдемо до розгляду групи Ассура 2,3. Накреслимо в масштабі групу Ассура і прикладемо діючі сили (рис. 3.9, в). Двоповодкова група Ассура третього виду частіше за інші зустрічається в сучасному машинобудуванні. При цьому, часто G2=0, Ф2=0 або настільки малі, що ними нехтують
До ланок групи прикладені: відома з попереднього розрахунку реакція  , а також відомі сили та момент G3, Ф3, МФ3. Невідомими є модуль та напрям реакцій R36 i R21 в шарнірах С та В, модуль реакції взаємодії
, а також відомі сили та момент G3, Ф3, МФ3. Невідомими є модуль та напрям реакцій R36 i R21 в шарнірах С та В, модуль реакції взаємодії  в поступальній парі 2-3.
в поступальній парі 2-3.
Розглянемо рівновагу не групи Ассура, а окремих ланок, які входять до групи, оскільки відомо напрям реакції R32 повзуна на кулісу (реакції у внутрішній кінематичній парі В). Ця реакція нормальна до напрямної CQ і прикладена в т.В (рис. 3.9, г).
За модулем реакцію R32 знайдемо з рівняння моментів сил, що діють на кулісу, відносно т.С
 ,
,
звідки  ,
,  .
.
Із рівноваги повзуна (рис. 3.9, д) маємо 
 ,
,  .
.
Реакцію R36 знаходимо методом планів сил згідно з векторним рівнянням для ланки 3 ,  .
.
Для цього з довільно вибраної точки (полюса a, рис. 3.9, е ) в масштабі  відкладаємо сили
відкладаємо сили  Невідома реакція R36 замкне многокутник сил. За модулем
Невідома реакція R36 замкне многокутник сил. За модулем  .
.
Переходимо до силового розрахунку механізму І класу. Накреслимо його в масштабі (рис. 3.10, а) і нанесемо діючі сили: відому силу  , силу ваги G1, невідому за модулем і напрямком реакцію R16, та невідому лише за модулем зрівноважувальну силу Fзр. В даному прикладі зрівноважувальна сила являє собою рушійну силу. Лінія дії сили Fзр проходить через полюс зачеплення Р під кутом зачеплення
, силу ваги G1, невідому за модулем і напрямком реакцію R16, та невідому лише за модулем зрівноважувальну силу Fзр. В даному прикладі зрівноважувальна сила являє собою рушійну силу. Лінія дії сили Fзр проходить через полюс зачеплення Р під кутом зачеплення  . Положення полюса Р та величина кута визначаються з геометричного розрахунку зубчастої передачі.
. Положення полюса Р та величина кута визначаються з геометричного розрахунку зубчастої передачі.
Сила Fзр знаходиться з рівняння моментів сил відносно т.А

 ,
,
Звідки Fзр=  .
.
Відмітимо, що силу Fзр можна також отримати і коротшим шляхом, не роблячи розбивки механізму, застосувавши теорему М.Є. Жуковського.
Реакцію R16 стояка 6 на кривошип 1 визначимо за допомогою побудови плану сил (рис. 3.10, б ) згідно з рівнянням
 .
.
За модулем невідома реакція 
Дата добавления: 2016-07-22; просмотров: 1666;
Поиск по сайту
Узнать еще
- Визначення закону руху механізму
- ВИЗНАЧЕННЯ ЗВЕДЕНОГО МОМЕНТУ ІНЕРЦІЇ МЕХАНІЗМУ.
- Визначення морфометричних характеристик та їх розрахунок
- Визначення основних розмірів кулачкового механізму
- ВИЗНАЧЕННЯ ПОЛОЖЕНЬ ЛАНОК ГРУП І ПОБУДОВА ТРАЄКТОРІЙ, ОПИСУВАНИХ ТОЧКАМИ ЛАНОК МЕХАНІЗМУ.
- Обмеженість ринкового механізму і необхідність державного втручання в економіку
- Основні параметри кулачкового механізму
- Побудова положень ланок механізму і траєкторій окремих точок

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
