Приборы прямого действия
Эти приборы основаны на методе непосредственной оценки.
Приборы прямого действия, как правило, выполняются по схеме состоящей из подвижной и неподвижной частей, соединённых упругим элементом (пружиной).
Измеряемая величина механизмом прибора преобразуется в силу, смещающую подвижную часть и деформирующую упругий элемент.
Противодействующая сила упругого элемента уравновешивает воздействующую силу, при этом указатель на шкале определяет измеряемую величину (пружинные весы, магнитоэлектрический милливольтметр).
Для примера рассмотрим манометр с одновитковой трубчатой пружиной (трубка Бурдона).
Основной чувствительный элемент - это полая изогнутая по дуге трубка 1, один конец которой, свободный, герметично заделан. А в другой, жестко закрепленный, подается измеряемое давление Р. В середине прибора на оси вращается маленькая шестеренка (трубка) 3, она соединена с зубчатом сектором 2, другой конец которого шарнирно связан со свободным концом трубки 1.
Все элементы прибора расположены последовательно:

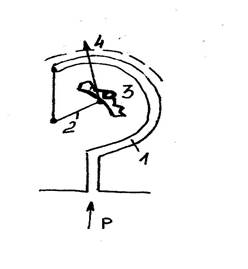
1 –чувствительный элемент (манометрическая трубка);
2 - сектор с зубчатой передачей;
3 - трибка (зубчатое колесо);
2,3 – передающие элементы;
4 - отчетное устройство (шкала со стрелкой).
При подаче избыточного давления Р трубка 1 стремится распрямиться, а при подаче разряжения, наоборот, скручивается. При этом свободный конец трубки перемещается и воздействует на передающие элементы 2, 3, которые поворачивают стрелку прибора 4.
Процесс измерения в данном методе характеризуется простотой и высокой скоростью. Точность измерений такими приборами оказывается невысокая из-за влияния различных воздействий, которые этот принцип не может компенсировать.
Для системы измерения прямого действия характерно последовательное включение элементов. При этом погрешности зависят от неточностей каждого отдельного элемента. Характерной особенностью приборов прямого действия является обязательное потребление энергии от объекта измерения.
Приборы сравнения
В приборах сравнения процесс измерения заключается в сравнении нулевым или дифференциальным методом измеряемой величины с мерой.
При этом можно использовать ручное или автоматическое управления.
I.Ручное управление:
а) Нулевой (компенсационный) метод.
Использует результирующие воздействие величин, на прибор сравнения, доводя это воздействие до нуля.
Примером нулевого метода может быть взвешивание груза х на рычажных равноплечих весах. В результате этой процедуры нужно обеспечить максимально точное уравновешивание, т.е. совпадение стрелки прибора с центральной (нулевой) риской.
СТРУКТУРНАЯ СХЕМА


НП – нуль-прибор - (стрелка и шкала);
ММ – многозначная мера - (разновес);
М – мера
Х – измеряемая величина;
К – компаратор (элемент сравнения) (коромысло весов).
Состояние равновесия достигается подкладыванием гирь до тех пор, пока величина меры М не уравновесит измеряемую величину навески Х. При этом стрелка ноль прибора НП займёт нулевое положение, а измеряемая величина Х будет определятся массой гирь М.
Алгоритм
На компаратор подается сигнал измеряемой величины Х, которая может быть предварительно преобразована, а также сигнал с многозначной меры М.
Компаратор выполняет операцию вычитания (сравнения) D=Х–М. Полученная разность подаётся на нуль- прибор.
Наблюдатель, в соответствии с показаниями, меняет меру М, пока D не станет равной нулю.
Определив значение меры, принимают её равной измеряемой величине Х.
б) Дифференциальный (разностный) метод.
Основан на измерении разности между известной величиной (мерой) и измеряемой величиной, после чего измеряемую величину находят сложением полученной разности и меры.

При этом, результат измерения находят как сумму массы гирь и показания на шкале.
II. При автоматическом управлении процесс уравновешивания автоматизирован.

Вместо нуль прибора здесь нуль индикатор, который состоит из усилителя (У) и исполнительного механизма (ИМ).
В зависимости от знака и значения разбаланса ИМ меняет многозначную меру до тех пор, пока D не станет равной нулю.
Для примера рассмотрим работу автоматического уравновешенного моста.
Автоматический уравновешенный мост предназначен для автоматического измерения температуры в комплекте с термопреобразователем сопротивления Rt.
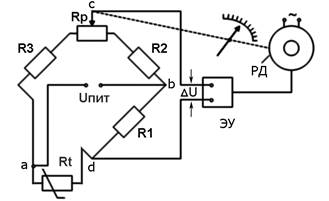
Компаратор (мост) с плечами R1, R2, R3;
Многозначная мера – реохорд (Rр);
Нуль индикатор – электронный усилитель ЭУ с реверсивным двигателем РД.
В измерительной схеме ток от источника Uпит. протекает по двум ветвям: асb и adb.
Если измеряемая температура остаётся неизменной и термопреобразователь сопротивления Rt не меняет свою величину, то мост находится в состоянии равновесия. Напряжение в измерительной диагонали c-d равно нулю (DU =0).
Но, если измеряемая температура поменяет своё значение, у термопреобразователя сопротивления Rt изменяется его электрическое сопротивление. Изменится и ток в ветви моста Rt, R1 по отношению к ветви R3, Rр, R2. Это приводит к появлению разбаланса напряжения в диагонали моста c-d, величина которого DU подаётся на вход усилителя.
Усиленный в ЭУ сигнал поступает на реверсивный двигатель РД, вал которого будет вращается до тех пор, пока движок реохорда Rр не устранит разбаланс, и DU станет равной 0. При этом, вал двигателя остановится, а стрелка прибора, связанная с ним, укажет значение измеряемой температуры.
При сравнении приборов необходимо отметить, что приборы сравнения более точные, по отношению к приборам прямого действия, так как проще определить равенство или неравенство нулю измеряемой величины, чем определить её размеры. В основном, погрешность приборов прямого преобразования лежит в пределах 1%-2,5%, приборов сравнения 0,2%-0,5%.
Дата добавления: 2020-07-18; просмотров: 567;
Поиск по сайту
Узнать еще
- III. Механизм действия ионизирующих излучений на биологические структуры
- III. Механизмы, средства и методы психологического воздействия.
- IP (Internet Protocol) – протокол межсетевого взаимодействия
- IV. Эффект действия реактивных и инерционных сил
- NON-STORED-действия
- VIII.3. Антропогенные воздействия на неблагоприятные экзогенные процессы
- А.3 Общий коэффициент полезного действия привода шасси.
- А.7 Устройство и принципы действия адсорбционных аппаратов

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
