Всенаправленный измеритель малой скорости с приемником давления на двухстепенном подвесе
Измеритель малой скорости с приемником давления на двухстепенном подвесе, как и измерители ЛОРАС и КВИС, использует эффект наддува в измерительной пневматической системе полного давления. В измерителях ЛОРАС и КВИС наддув достигается за счет окружной скорости приемника давления при его вращении на штанге или на лопасти.
Измеритель малой скорости с приемником давления ПВД на двухстепенном подвесе был впервые разработан в начале семидесятых годов английской фирмой Маркони Авионикс (Marconi Avionics) и получил условное название ЛЭССИ (LASSIE) (рис. 5.21).
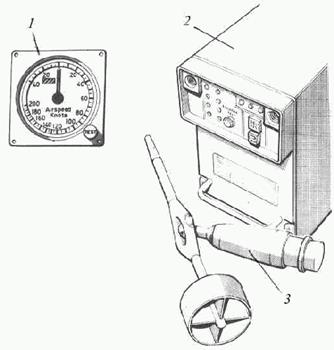
| Рис. 5.21. Внешний вид измерителя ЛЭССИ: 1 – индикатор; 2 – вычислитель; 3 ‑ датчик |
Измеритель ЛЭССИ состоит из индикатора 1, вычислителя 2, датчика 3. Для получения наддува в пневмосистеме Рп датчик 3 измерителя размещается на фюзеляже вертолета под НВ. В процессе вращения НВ скорость отбрасывания потока воспринимается ПВД 1, пропорциональное ей полное давление передается по тракту 7 в вычислитель (рис. 5.22).
Как было показано во второй главе, величина наддува зависит от интенсивности вихря от НВ и составляет 50 – 130 км/ч (таблица 2.5). Это уже достаточно большие скорости, которые можно легко преобразовать в электрические сигналы для обработки их в вычислителе.
Измеритель ЛЭССИ способен воспринимать и вычислять параметры Рп , Рст , Рд , Тт, угол атаки местный αм , угол скольжения βм, скорости по продольной оси ± vх , по попереч ной оси ± vz . Основу системы составляет ее датчик первичных аэродинамических параметров (рис. 5.22). Он представляет собой комбинированное устройство, совмещающее в себе ПВД и флюгер, закрепленные на общей штанге, свободно вращающейся на двухстепенном подвесе 2 относительно осей Х – Х и Z –Z.
Рис. 5.22. Принципиальная схема датчика измерителя ЛЭССИ: 1 – ПВД; 2 – подвес двухстепенной; 3 – датчик угла β; 4 – флюгер; 5 – датчик угла α, 6 – корпус
ПВД и флюгер сами по себе в отдельности не являются оригинальными. Оригинальным является их сочетание вместе с подвесом. В качестве выходных устройств по угловым координатам применены БСКТ. Давления с ПВД (Рп, Рст) передаются на выход устройства через подвижный шарнир с помощью гибких шлангов. Датчик устанавливается на вертолете под несущим винтом и обдувается местным воздушным потоком, который представляет собой сумму потоков от несущего винта и от скорости движения вертолета относительно воздуха. В режиме висения при отсутствии ветра ось Y – Y датчика совпадает с вертикальной осью вертолета Y – Y. Во всех остальных случаях ось Y – Y датчика совпадает по направлению с суммарным вектором воздушного потока (рис. 5.24).
На рис. 5.23 представлена векторная диаграмма воздушных потоков в месте установки датчика ЛЭССИ при полете вертолета по оси X – X без скольжения. В режиме висения весь поток НВ направлен по вектору АД. Плоскость НВ перпендикулярна вектору АД. При движении плоскость НВ наклоняется в сторону предполагаемого движения.
Появляется угол наклона плоскости НВ φ. Вектор потока АД занимает положение АС. По направлению движения вертолета появляется поток ДС – проекция вектора АС на ось X – X. Одновременно, под действием тяги винта, расположенного под углом φ, появляется вектор воздушного потока СВ. Этот вектор пропорционален воздушной скорости. В результате действия потока от НВ и от скорости полета результирующий вектор занимает положение АВ. Как показано на рисунке, датчик отслеживает положение суммарного потока АВ.
По аналогии с самолетом будем обозначать аэродинамические углы через α и β. Под углом α будем понимать аэродинамический угол между проекцией вектора суммарного потока АВ на плоскость ZOX (вектор ДВ) и вектором суммарного потока АВ. Под углом β будем понимать аэродинамический угол между вектором скорости по оси Х - Х (вектор ДВ) и проекцией вектора суммарного потока на плоскость ZOX (вектор ДВ2 , риc. 5.24).
Рис. 5.23. Векторная диаграмма воздушных потоков в месте установки датчика ЛЭССИ при полете вертолета в направлении оси Х – Х без скольжения (β = 0)
Из приведенных определений следует, что полной аналогии аэродинамических углов на вертолете, определяемых с помощью всенаправленного датчика, и на самолете, нет. Тем не менее, это уже аэродинамические углы, однозначно связанные с суммарным аэродинамическим вектором, который на вертолете определяет и несущую и движущую силы. С привлечением дополнительной информации (угол автомата перекоса и др.) можно определить значения аэродинамических углов относительно фюзеляж вертолета. Эти зависимости определяются при трубных продувках и летных испытаниях конкретного вертолета.
В соответствии с векторной диаграммой рис.5.23 для полета без скольжения определим алгоритмы скорости по давлению, воспринимаемому ПВД. Напишем систему уравнений
DВ = DС + СВ
АD = АВ·sin α
DС = АD·tg φ = АВ·sin α·tg φ (5.36)
DВ = АВ·cos α
Решая совместно уравнения системы (5.36) получим:
СВ=DB–DC=AВ·cosα-AB·sinα·tgφ=AB(cos α - sin α·tg φ). (5.37)
Так как вектop СВ пропорционален величине скоростного напора по траектории полета Х - Х: СВ ≡ 0,5 ρ  , то скорость равна в околонулевом диапазоне
, то скорость равна в околонулевом диапазоне
 . (5.38)
. (5.38)
На рис. 5.24 представлена векторная диаграмма потоков в месте установки всенаправленного датчика аэродинамических параметров при полете вертолета со скольжением (общий случай полета).
Используя известные тригонометрические зависимости, получим систему уравнений для определения вектора СВ:
СВ = DB – DC;
DC = AD·tg φ;
AD = AB2·sin α; (5.39)
DB = DB2·cos β;
DB2 = AB2 cos α.
Решая совместно уравнения системы (5.39) получим формулу для определения скоростного напора, пропорционального скорости полета по оси Х-Х.:
СВ = DB2·cosβ – AD · tgφ = AB2 · cosα · cosβ - AB2 · sinα · tgφ =
= AB2 (cosα · cosβ – sinα · tg φ) (5.40)
Из общей формулы (5.40) получается частный случай при полете без скольжения, когда β = 0.
Для определения вектора, пропорционального скоростному напору при движении вертолета по оси Z-Z напишем систему уравнений:
C1B3 = DB3 – DC1;
DC1 = AD · tgφ1;
AD = AD2·sin α; (5.41)
DB3 = DB2 · sinβ;
DB2 = AB2 · cos α.
Решая совместно уравнения системы (5.41) получим окончательную формулу для скоростного напора при полете по оси Z-Z:
C1B3 = DB2 · sinβ – AD · tgφ1 = AB2 · cosα · sin β - AB2 · sinα · tg φ1 =
= AB2(cosα · sin β - sin α · tg φ1). (5.42)
| Рис. 5.24. Векторная диаграмма воздушных потоков в месте установки датчика ЛЭССИ при полете вертолета со скольжением |
С учетом того, что CB = 0,5 ρ , C1B3 = 0,5 ρ  , AB2 = Рд, получим формулы для определения скоростей по осям Х-Х и Z-Z:
, AB2 = Рд, получим формулы для определения скоростей по осям Х-Х и Z-Z:
 , (5.43)
, (5.43)
 , (5.44)
, (5.44)
где Pд – динамическое давление от суммарного потока НВ вертолета и скорости полета.
Принципиальной особенностью датчика системы ЛЭССИ является наиболее благоприятные условия для измерения давлений Рп, Рст. Кроме того, этот датчик способен измерять аэродинамические углы.
Недостатком датчика является ограниченная возможность по измерению малой, околонулевой скорости вертолета. Ограничение наступает из-за наличия трения в шарнире. Судя по некоторым зарубежным сведениям начальная скорость измерения составляет около 20 – 30 км/ч.
Как показали результаты теоретических исследований в облегченном варианте датчика (без обогрева) с точностью до 1о по углам α и β можно достичь начальной скорости 15 – 20 км/ч. Кроме углов застоя датчика величина измеряемой минимальной скорости в системе аэродинамических параметров с датчиком типа ЛЭССИ определяется динамической погрешностью и порогом чувствительности по давлению (статической погрешностью) решающих устройств.
Специалисты ОАО УКБП существенно улучшили схему датчика измерителя ЛЭССИ за счет замены трубопроводов по каналам Рп и Рст на специальную конструкцию воздухопроводов с магнитно-жидкостной герметизацией и за счет оптимизации флюгера с целью увеличения его момента. Эти технические решения позволили разработать датчик вертолетной скорости ДВС с улучшенными характеристиками (рис. 5.25).
Рис. 5.25. Внешний вид датчика ДВС
В одном из вариантов ДВС были реально получены следующие технические характеристики:
- масса 1,6 кг;
- диапазон скоростей от 20 до 400 км/ч;
- диапазон по углу атаки α = ± 180°;
- диапазон по углу скольжения β = ± 70°;
- погрешность восприятия Рд ± 0,02q;
- погрешность восприятия Рст ± 0,02q;
- погрешность измерения угла атаки от 0,5 до 2 градусов;
- погрешность измерения угла скольжения от 0,5 до 2 градусов.
Оригинальность рассмотренных измерителей малых скоростей сказывается на месте их установки на вертолете (рис. 5.26).
Дата добавления: 2020-07-18; просмотров: 672;
Поиск по сайту
Узнать еще
- Grad Р (градиент давления)
- I. Критерии поражения волной давления
- А) Деградация почв и определение ее скорости
- А) Распределение давления.
- Автоматические регуляторы и контрольно-измерительные приборы
- Аккредитация органов по сертификации и испытательных (измерительных) лабораторий
- Активные измерительные трансреакторы
- Алгоритм проектирования кулачкового механизма по допустимому углу давления

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
