Упругие элементы передних и задних подвесок
На рис. 166 изображена колебательная система - кузов автомобиля подрессоренной массой Мп, опирающийся на упругие элементы передних и задних подвесок.
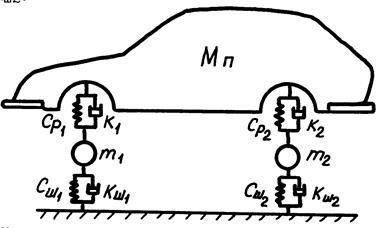
Рис. 166. Колебательная система - кузов автомобиля на колесах
На рис. 166 обозначены: коэффициенты сопротивления амортизаторов – К1 и К2 , массы колес – m1 и m 2, жесткости шин – Сш1 и С ш2 , коэффициенты внутреннего трения шин – Кш1 и К ш2 , жесткости рессор – Ср1 и С р2 .
При расчетах колебаний автомобиль может быть представлен в виде балки, опирающейся на два упругих элемента – передние и задние рессоры автомобиля (рис. 167).
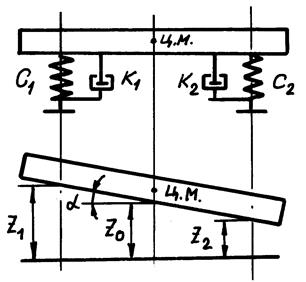
Рис. 167. Модель автомобиля
Вертикальные перемещения и поворот балки на упругих элементах с жесткостями С1 и С2, представляющей собой модель автомобиля, можно выразить уравнениями:
вертикальные силы, действующие на кузов
М п ×  + C1 × z 1 + C 2 × z2 = 0; (104)
+ C1 × z 1 + C 2 × z2 = 0; (104)
продольные моменты, действующие на кузов относительно центра масс
M п ×r 2 ×  – C1 × z 1 × L1 + C 2 × z 2 × L 2 = 0, (105)
– C1 × z 1 × L1 + C 2 × z 2 × L 2 = 0, (105)
где М п - подрессоренная масса; z 1 - перемещение балки над передним упругим элементом; z 2 - перемещение балки над задним упругим элементом; a - угол поворота балки; L1 - расстояние от центра масс балки до середины переднего упругого масс балки; L2 – расстояние от центра масс балки до середины заднего упругого элемента; r - радиус инерции; z - перемещение центра масс балки.
Выразив из рис.163 перемещения z1 = z + a×L1 и z 2 = z - a × L 2 и продифференцировав их дважды, запишем:
 = + × L1 . и
= + × L1 . и  =
=  + × L2 . (106)
+ × L2 . (106)
Подставив в уравнения (104) и (105) правые части из выражений (107) после преобразований получим:
Мп + C1 × z 1 × (1 +  ) + C 2 × z2× (1 –
) + C 2 × z2× (1 –  ) = 0 ; (107)
) = 0 ; (107)
Мп + C2 × z 2 × (1 +  ) + C1 × z1× (1 – ) = 0 . (108)
) + C1 × z1× (1 – ) = 0 . (108)
Поделив эти уравнения на Мп, запишем:
+  × +
× +  × z1 = 0 ; (109)
× z1 = 0 ; (109)
+  × +
× +  × z2 = 0 . (110)
× z2 = 0 . (110)
Обозначим выражения:
= m 1 и = m 2 ,
где m 1 , m 2 – коэффициенты связи колебаний передней и задней частей автомобиля.
В уравнениях (119) и (111) обозначим:
= w12 ; = w22 ,
где w1 и w2 –частоты колебаний передней и задней частей автомобиля без учета взаимной связи колебаний (парциальные частоты).
Характеристическим для системы уравнений с использованием m и w является уравнение вида:
W4 – (w12 + w22) ×  +
+  = 0 . (111)
= 0 . (111)
Решая это биквадратное уравнение, можно получить выражение для определения частот связанных колебаний:
Для высокой частоты колебаний
W1 =  ; (112)
; (112)
Для низкая частота колебаний
W2 =  . (113)
. (113)
Если в выражениях (110) и (111) L1 × L 2 = r2, то коэффициенты связи  и
и  равны нулю. Тогда колебания передней и задней частей кузова автомобиля оказываются не связаны между собой: каждая из них колеблется со своей частотой, называемой парциальной, которая рассчитывается по выражению
равны нулю. Тогда колебания передней и задней частей кузова автомобиля оказываются не связаны между собой: каждая из них колеблется со своей частотой, называемой парциальной, которая рассчитывается по выражению
w =  .
.
Для легковых и грузовых автомобилей отношение r2 / (L1 × L 2) близко к единице. Поэтому колебания передней и задней частей этих автомобилей считаются не связанными между собой. Для автобусов это отношение может приближаться к 2, вследствие чего взаимное влияние подвесок автобусов необходимо учитывать. Если
0,8L1× L 2 < r2 < 1,2L1 × L 2 ,
частоты связи W и парциальные частоты w1 и w2 отличаются лишь на 5...6 % . Таким образом, на величину W и w влияет положение центра тяжести, момент инерции подрессоренной части автомобиля и отношение статических прогибов передней и задней подвесок.
Дата добавления: 2020-06-09; просмотров: 747;
Поиск по сайту
Узнать еще
- III. Упругие столкновения
- IV.3. Элементы стратегии выживания человечества
- VI.II. Элементы складки
- А - решетчатая конструкция из бетонных элементов; б - пространственная георешетка; в - укрепление откоса георешеткой; 1, 2 - бетонные элементы; 3 - анкеры; 4 - тяжи анкеров
- Активные и пассивные элементы электрических цепей. Закон Ома
- Анализ возможных последствий неадекватного поведения элемента на смежные элементы
- Архитектурные элементы
- Б. Элементы контрольных приспособлений

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
