Асинхронные электродвигатели
Для асинхронных двигателей можно принять:

и

поэтому 
и 
Рассмотрим некоторые зависимости. Скольжение асинхронного двигателя
где n1 – синхронная скорость;
n2 – скорость вращения ротора.
Электромагнитная мощность, передаваемая через воздушный зазор,
 .
.
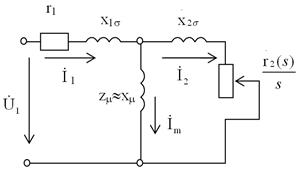
Рис. 4.2. Схема замещения асинхронной машины двигателя.
Электромагнитный момент уравновешивается тормозным моментом, при этом механическая мощность

Потери в роторе

Согласно схемы замещения асинхронной машины (см. Рис. 4.2) имеем:
 .
.
Из условия

определим Ра,макс и соответствующий ей Ммакс. Они будут иметь место при  .
.
В дальнейшем воспользуемся приближенными выражениями:
где

При s = 1 пусковой момент:
Рассмотрим как изменяются эти величины при изменении U и f?

так как

очевидно, что при 

Изменение моментных характеристик асинхронного двигателя при измeнeнии напряжения и частоты показано соответственно на Рис. 4.3 и 4.4,а изменение моментных характеристик при совместном пропорциональном изменении U и f — на рис 4.5.
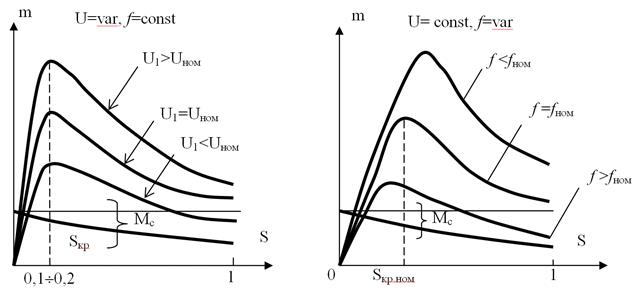
| Рис. 4.3. Изменение моментной характеристики асинхронного двигателя при изменении напряжения | Рис. 4.4. Изменение моментной характеристики асинхронного двигателя при изменении частоты |
Из Рис. 4.5 следует, что можно получить благоприятные условия пуска двигателя с механизмом при пониженном напряжении и пониженной частоте.
Моменты сопротивления разнотипных механизмов (Рис. 4.6) различны.
Для большинства механизмов

где mС1 — момент сопротивления при s = 1;
mС0 — тоже при s = 0, причем mС0 » mС,НОМ.
Для большинства центробежных механизмов (за исключением насосов, работающих с большим статическим набором)

Кривые Рис. 4.3 и 3.4 наглядно показывают влияние изменения U и f на режим работы двигателя с механизмом.
При этом следует иметь в виду, что производительность механизмов прямо пропорциональна числу оборотов и, следовательно, частоте.
При работе асинхронных двигателей в условиях несинусоидального напряжения возникают добавочные потери мощности, обусловленные высшими временными гармоническими тока в цепях статора и ротора. Добавочные потери, обусловленные током n-й гармоники равны:
где  и
и  –соответственно активное сопротивление статора и приведенное сопротивление ротора на частоте n-й гармоники.
–соответственно активное сопротивление статора и приведенное сопротивление ротора на частоте n-й гармоники.
При повышенных частотах в обмотках статора и ротора резко возрастает поверхностный эффект.
При несимметрии напряжения под влиянием токов обратной последовательности результирующий момент двигателя М снижается, скольжение при том же моменте сопротивления на валу Мс увеличивается и, следовательно, увеличиваются потери и нагрев машины, а также снижается КПД. И также в результате взаимодействия прямых и обратных полей возникают вибрационные радиальные силы частоты 2f1.
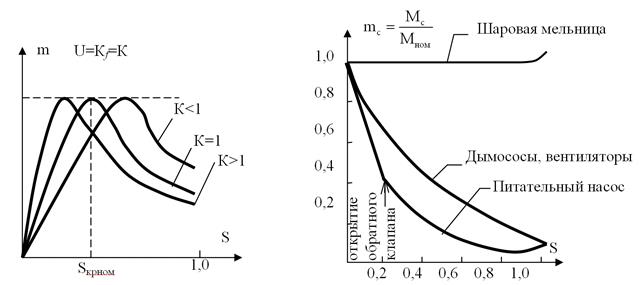
| Рис. 4.5. Изменение моментной характеристики асинхронного двигателя при пропорциональном изменении напряжения и частоты | Рис. 4.6. Моменты сопротивления различных механизмов |
Отметим, что нагрузка обладает регулирующим эффектом: потребление активной и реактивной мощности изменяется при изменении подведенного напряжения (см. Рис. 4.7).
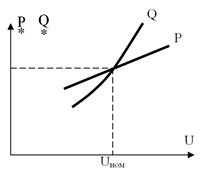
Рис. 4.7. Регулирующий эффект нагрузки (статические характеристики)
Для основной массы потребителей – асинхронных двигателей – при снижении напряжения реактивная нагрузка растет быстрее активной, в результате чего при отрицательных отклонениях напряжения коэффициент мощности возрастает, а при повышении напряжения падает. Это следует учитывать при построении графиков для периодов малой нагрузки и при расчетах по регулированию напряжения.
Дата добавления: 2016-09-26; просмотров: 2045;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
