Расчетные формулы для различных отражателей
| Модельный отражатель | Формула акустического тракта | |
| Прямой преобразователь | Наклонный преобразователь | |
| Дисковый | 
| 
|
| Цилиндрический | 
| 
|
| Плоская донная поверхность | 
| 
|
| Цилиндрическая вогнутая поверхность | 
| 
|
АРД-диаграмма
Для сопоставления размеров несплошностей, выявленных УЗ дефектоскопией, их необходимо сравнить с каким-либо модельным отражателем. Для прямых преобразователей чаще всего в качестве отражателя принимают плоский диск, ориентированный перпендикулярно оси УЗ пучка. Эквивалентным диаметром (площадью) дефекта называют диаметр (площадь) круглого плоскодонного отражателя, расположенного перпендикулярно акустической оси на том же расстоянии, что и дефект в материале с одинаковыми акустическими свойствами, дающий эхо-импульс такой же амплитуды.
АРД-диаграммуприменяют для расчета амплитуды эхо-сигнала в зависимости от расстояния до отражателя и его размеров. Она устанавливает зависимость между амплитудой А эхо-сигнала от дискового отражателя, ориентированного перпендикулярно акустической оси ПЭП и отражающего на 100 % падающую УЗ энергию, и расстоянием r от излучателя до отражателя и диаметром D (или площадью) отражателя.
АРД-диаграммы бывают двух типов: обобщенные и рабочие. На обобщенных диаграммах (рис. 2.26) по оси абсцисс отложено расстояние между ПЭП и отражателем, нормированное на размер ближней зоны излучателя хб. По оси ординат отложено ослабление в отрицательных децибелах. На поле АРД-диаграммы нанесена серия кривых, каждая из них соответствует своему диаметру (или площади) эквивалентного отражателя, отнесенного к диаметру (площади) пьезоэлемента. Область r/хб<1 соответствует ближней зоне ПЭП. При r/хб>1 в дальней зоне амплитуда с ростом r убывает. Самая верхняя кривая соответствует донному сигналу.
Рис. 2.26. Обобщенная АРД-диаграмма
Рабочие АРД-диаграммы строят для конкретного вида ПЭП с учетом его размеров, частоты и угла ввода. Для построения рабочих АРД-диаграмм используют несколько способов: на основе обобщенных АРД-диаграмм, определенных расчетным путем, с использованием формул акустического тракта, и экспериментальным путем. На оси абсцисс рабочих АРД-диаграмм откладывают расстояние от ПЭП до отражателя в миллиметрах. Для наклонных ПЭП иногда по оси абсцисс указывается расстояние по горизонтальной (х) или вертикальной (у) координате.
 В отечественных нормативных документах АРД-диаграммы часто приводятся в виде таблиц с поправками, а в комплект УЗ дефектоскопов иногда входят АРД-шкалы – прозрачные накладные шкалы, которые устанавливаются на экран дефектоскопа. На шкалах нанесены кривые изменения амплитуд в зависимости от размеров отражателя и расстояния до него.
В отечественных нормативных документах АРД-диаграммы часто приводятся в виде таблиц с поправками, а в комплект УЗ дефектоскопов иногда входят АРД-шкалы – прозрачные накладные шкалы, которые устанавливаются на экран дефектоскопа. На шкалах нанесены кривые изменения амплитуд в зависимости от размеров отражателя и расстояния до него.
Определение эквивалентного размера отражателя производится следующим образом. С помощью УЗ дефектоскопа измеряется расстояние r до отражателя и разность  , дБ, между амплитудами сигналов от отражателя и донного сигнала, измеренного в изделии толщиной r0. Донный сигнал используется как опорный. По оси абсцисс откладывают расстояние r0 и восстанавливают перпендикуляр к оси до пересечения с АРД-кривой донного сигнала (рис. 2.27).
, дБ, между амплитудами сигналов от отражателя и донного сигнала, измеренного в изделии толщиной r0. Донный сигнал используется как опорный. По оси абсцисс откладывают расстояние r0 и восстанавливают перпендикуляр к оси до пересечения с АРД-кривой донного сигнала (рис. 2.27).
Из точки пересечения проводят горизонтальную линию, и значение по оси ординат принимают за точку отсчета, от которой вниз откладывают разность  . Из получившейся точки на оси ординат проводят горизонтальную линию. По оси абсцисс откладывают расстояние г и восстанавливают перпендикуляр. Точка пересечения горизонтальной линии и этого перпендикуляра попадает на АРД-кривую эквивалентного отражателя площадью SЭ. Если точка пересечения оказалась между двумя линиями, то выбирается ближайшая кривая или производится интерполирование.
. Из получившейся точки на оси ординат проводят горизонтальную линию. По оси абсцисс откладывают расстояние г и восстанавливают перпендикуляр. Точка пересечения горизонтальной линии и этого перпендикуляра попадает на АРД-кривую эквивалентного отражателя площадью SЭ. Если точка пересечения оказалась между двумя линиями, то выбирается ближайшая кривая или производится интерполирование.
2.8. Шумы и помехи при контроле
методами отражения и прохождения
Помехами называют сигналы, не вызванные отражениями ультразвука от несплошностей и не меняющие своего положения во времени при неизменных условиях контроля. Шумы – это беспорядочные непериодические по времени прихода сигналы, а также сигналы, имеющие случайные значения параметров.
Внешние шумы. Они имеют электрическую или акустическую природу и проявляются в виде импульсов на экране дефектоскопа. Электрические шумы возникают при включении и выключении мощных электрических аппаратов, при работе сварочной аппаратуры. Акустические шумы вызываются ударами по объекту контроля.
Влияние электрических шумов ослабляется экранированием корпуса дефектоскопа, кабелей и преобразователей, заземлением. Экранирование импульсов помех, поступающих по сети питания, осуществляется фильтром верхних частот, вводимым в схему блока питания.
Электрические внешние импульсные шумы поступают в случайные моменты времени. Они представляют опасность для автоматизированных систем контроля, вызывая ложное срабатывание сигнализатора дефектов. Существует метод борьбы с ложными срабатываниями, основанный на регистрации только повторяющихся несколько раз импульсов. Этот способ повышает помехоустойчивость, но снижает производительность контроля.
Электрические флуктуации. В элементах электронной схемы приемника дефектоскопа возникают электрические шумы, ограничивающие минимальную амплитуду принимаемого сигнала. При увеличении коэффициента усиления электрические флуктуации проявляются в увеличении ширины и размытии линии развертки на экране дефектоскопа. Эти флуктуации могут быть существенны в эхо-методе и в методе акустической эмиссии. В теневом методе усиление не очень велико и внутренние электрические флуктуации существенного значения не имеют. Для повышения помехоустойчивости проще всего увеличить амплитуду зондирующего импульса. Кроме того, иногда уменьшают ширину полосы пропускания приемника или применяют зондирующие импульсы специальной (колокольной формы).
Помехи преобразователя – это сигналы, вызванные распространением и отражением ультразвуковых волн в призме, демпфере, протекторе и других элементах ПЭП. Их называют реверберационными помехами. При контроле по совмещенной схеме после зондирующего импульса видны сигналы, уменьшающиеся по мере удаления от зондирующего импульса. Уменьшение этих помех достигается выбором рациональной конструкции ПЭП. При контроле по раздельной схеме эти помехи или отсутствуют совсем, или значительно ослаблены.
Наклонные преобразователи с большими углами ввода, кроме объемных, могут возбуждать поверхностные волны. Эти волны, отражаясь от границ ОК, от рисок и канавок на поверхности, создают импульсы помех. Обнаружить их довольно легко: нажатие пальцем, смоченным маслом, на точку, в которой отражается волна изделия на пути поверхностной волны, уменьшающей амплитуду импульса.
 Ложные сигналы. К ложным сигналам относят сигналы в зоне контроля, обусловленные отражениями ультразвука от элементов конструкции изделия и не связанные с дефектами типа несплошности. Ложный сигнал может быть принят за отражение от дефекта, он может наложиться на сигнал от дефекта и исказить его характеристики. Для исключения влияния ложных сигналов применяют тщательный выбор участка стробирования развертки, а также амплитудную дискриминацию, то есть отсечку сигналов ниже определенного уровня. Ложные сигналы разделяют на несколько групп.
Ложные сигналы. К ложным сигналам относят сигналы в зоне контроля, обусловленные отражениями ультразвука от элементов конструкции изделия и не связанные с дефектами типа несплошности. Ложный сигнал может быть принят за отражение от дефекта, он может наложиться на сигнал от дефекта и исказить его характеристики. Для исключения влияния ложных сигналов применяют тщательный выбор участка стробирования развертки, а также амплитудную дискриминацию, то есть отсечку сигналов ниже определенного уровня. Ложные сигналы разделяют на несколько групп.
1. Сигналы от мест изменения сечения ОК, от выступов и выемок возникают при контроле наклонными преобразователями (рис. 2.28). Сильный сигнал от двугранного угла возникает в преобразователе в положении I. Более слабый отраженный сигнал от галтели виден в положении II. В положении III тоже возникает весьма слабый сигнал от дифракционного рассеяния на ребре двугранного угла. Кроме того, возникает поверхностная волна, которая сначала бежит вдоль АВ, затем, отражаясь, бежит обратно и порождает дополнительный ложный сигнал.
Ложные сигналы при контроле сварных соединений возникают от усиления шва (рис. 2.29, положение I), от выпуклости в корне шва (положения II и III). Зеркальные отражения возникают при углах ввода 35°…55°. При больших углах ввода от границы основного и наплавляемого металла возникают дифракционные поля (положение IV).
Выявление ложных сигналов основано на нескольких способах. Ложные сигналы от выпуклостей в корне шва при контроле с разных сторон выявляются точным измерением координаты х. Если сигнал вызван дефектом, то l1+l2=L (L – расстояние между преобразователями). Если сигналы приходят от усиления, то l1+l2>L. Хорошо известен способ нажатия пальцем, смоченным маслом, на точку, в которой отражается волна, дающая ложный сигнал. При нажатии амплитуда ложного сигнала уменьшается. Этот способ эффективен и для выявления поверхностной волны, вызывающей ложный сигнал. Следует заметить, что этот способ не эффективен при определении ложных сигналов, созданных SH-волнами, а также SV-волнами, падающими перпендикулярно поверхности. Улучшение отношения сигнал/помеха достигают выбором угла ввода преобразователя или применением схем контроля тандем и дуэт.
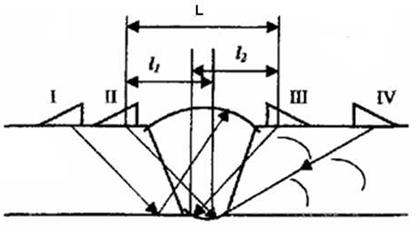
Рис. 2.29. Ложные сигналы
при контроле сварных соединений
2. Помехи от многократных отражений возникают в иммерсионном
варианте зеркально-теневого или эхо-метода. Они появляются в результате многократного прохождения УЗ волной в контактной жидкости между преобразователем и изделием. Для устранения влияния ложных сигналов толщина слоя иммерсионной жидкости должна быть достаточно велика, чтобы импульс от двукратного отражения в жидкости приходил позднее донного сигнала. Время прихода ложного импульса:
 ,
,
где Нк и ск – толщина слоя жидкости и скорость звука в ней. Время прихода донного сигнала: tд=2Нк/сk+2Hu/cu, Ни и си – толщина изделия и скорость звука в нем. Условие tл>tд приводит к неравенству:
Нк > Нu  , (2.37)
, (2.37)
которому должна удовлетворять толщина слоя иммерсионной жидкости.
При контроле тонких изделий комбинированными методами важно, чтобы сигнал, прошедший один раз сквозь изделие, и сигнал, двукратно отраженный в изделии, не интерферировали. Для этого длительность импульса  должна быть меньше двукратного времени пробега ультразвука в изделии:
должна быть меньше двукратного времени пробега ультразвука в изделии:
< 2Нu/cu . (2.38)
Для исключения интерференции уменьшают длительность зондирующего импульса. Обычно это сопровождается повышением частоты УЗК.
3. Влияние свободной поверхности сказывается при распространении вдоль поверхности волны и ее интерференции, отраженной от поверхности. Если дефект расположен вблизи поверхности изделия, то при широкой диаграмме направленности боковой луч пучка выходит на свободную поверхность, отражается от нее и попадает на дефект (рис. 2.30).
Рис. 2.30. Схема возникновения ложных сигналов
Условие отсутствия интерференции на расстоянии дефекта до поверхности h определяется неравенством:
h > 0,27d  /a , (2.39)
/a , (2.39)
где а – радиус излучателя; d – расстояние от преобразователя до дефекта (глубина залегания).
Чтобы исключить такие ложные сигналы, выполняется контроль наклонным преобразователем с боковой поверхности или используется
ЭМА-преобразователь для нормального ввода поперечной волны.
Структурные помехи. Рассеяние ультразвука на структурных неоднородностях, зернах материала приводит к структурным помехам. Многочисленные импульсы, образовавшиеся в результате рассеяния ультразвука на неоднородностях, приходят на приемный преобразователь с различным временем задержки и с разной фазой. На экране дефектоскопа они создают серию близкорасположенных пиков («травы»), затрудняющих наблюдение полезного сигнала. Структурные помехи ограничивают чувствительность контроля в методах отражения и комбинированных методах. Иногда структурные помехи превышают уровень донного сигнала, исключая возможность применения зеркально-теневого метода.
В теневом методе структурные помехи влияют на амплитуду сквозного сигнала. Однако импульсы помех поступают уже после переднего фронта, поэтому стробированием удается улучшить отношение «сигнал/шум» В некоторых случаях возможно применение временного теневого метода на низких частотах.
Известны два метода повышения чувствительности при сильном влиянии структурных помех. Первый заключается в оптимальном выборе параметров контроля, второй – в применении методов обработки сигналов. Для надежного обнаружения амплитуда полезного сигнала должна в 3 – 5 раз превосходить средний уровень помех. Можно рекомендовать следующие меры, повышающие отношение «сигнал/шум». Применение преобразователей с узкой диаграммой направленности и фокусирующих, так как эта мера уменьшает объем материала, являющегося источником помех. Если контроль производится в дальней зоне, то направленность улучшается при увеличении диаметра пьезопластины. В некоторой степени к снижению помех приводит уменьшение длительности зондирующего импульса.
В неоднородных анизотропных материалах, таких как аустенитная сталь, важно правильно выбрать направление прозвучивания. Использование продольных волн вместо поперечных уменьшает рассеяние. В грубозернистых материалах приходится уменьшать рабочую частоту. Иногда положительный эффект дает применение Р-С преобразователей. Удобным бывает введение компенсирующей отсечки, в объектах большой толщины применяют методики послойного контроля.
При сканировании малые смещения ПЭП в пределах 1…2 мм почти не влияют на амплитуду сигнала от дефекта. В то же время детальная структура импульсов структурных помех радикально изменяется. Это дает возможность опытному оператору обнаруживать дефекты, импульсы от которых сравнимы с уровнем структурных помех.
Контрольные вопросы
1. Что называется свободным и вынужденным колебанием?
2. Что такое поляризация волн?
3. Каковы причины затухания упругих волн?
4. На чем основывается закон Снеллиуса?
5. Назовите назначение критических углов ввода.
6. Что такое индикатриса рассеяния?
7. Перечислите виды дифракции.
8. Что такое прямой и обратный пьезоэффект?
9. Перечислите элементы конструкции ПЭП и каково их назначение?
10. Что называют ближней и дальней зоной преобразователя?
11. Для чего применяют АРД-диаграмму?
3. ФИЗИЧЕСКИЕ ОСНОВЫ
ВИХРЕТОКОВОЙ ДЕФЕКТОСКОПИИ
Методы вихретокового контроля основаны на законе электромагнитной индукции. Согласно М. Фарадею, внешнее по отношению к среде переменное магнитное поле наводит электродвижущую силу, которая, если среда проводящая, создает в ней вихревые токи, регистрирующиеся измерительным преобразователем. В качестве преобразователя используются обычно индуктивные катушки (одна или несколько). Электромагнитное поле вихретоковых токов воздействует на катушку преобразователя, проводя в них эдс или изменяя их полное сопротивление [21, 22].
Рассмотрим общую функциональную схему вихретокового контроля на примере прибора с накладными измерительным преобразователем (рис. 3.1).
Измерительный преобразователь состоит из возбуждающей оболочки, подключенной к генератору переменного тока, и измерительной обмотки, подключенной к блоку измерителя.
В измерительной обмотке преобразователя наводится эдс, определяемая потокосцеплением. Эта эдс (или напряжение) служит сигналом, передающим информацию об объекте в блок измерения, причем не только об одном параметре объекта контроля. Таким образом, напряжение зависит от следующих причин (факторов): толщины листа, электрической проводимости объекта, магнитной проницаемости, состояния поверхности, наличия и размеров дефектов, зазора и ориентации оси преобразователя, химического состава и структуры, температуры и т.д.
Магнитное поле преобразователя возбуждает в плоском объекте контроля концентрические вихревые токи, плотность которых максимальна на поверхности электропроводящего объекта в контуре, диаметр которого близок к диаметру возбуждающей обмотки. Магнитное поле вихревых токов противоположно первичному магнитному полю возбуждающей обмотки, поэтому результирующее поле зависит от электромагнитных свойств контролируемого объекта и от расстояния между преобразователем и объектом (от зазора).
Рис. 3.1. Принцип действия прибора с накладным преобразователем
Высокая степень информативности вихретокового преобразователя определяет достоинства и трудности метода вихретокового контроля. С одной стороны, метод вихретокового контроля позволяет осуществлять многопараметровый контроль, а с другой – требует применения специальных приемов с целью разделения информации об отдельных параметрах объекта.
Другая не менее важная особенность вихретокового контроля – это бесконтактность, т.е. между объектом контроля и преобразователем создается небольшое (до 2 мм), но достаточное расстояние для свободного движения преобразователя. Вихретоковый метод позволяет производить контроль на больших скоростях, которые недоступны другим методам.
Получение информации в виде электрических сигналов, бесконтактность и высокое быстродействие вихретокового контроля – всё это определяет высокую производительность и возможность автоматизации контроля.
На сигналы вихретокового преобразователя практически не влияют влажность, давление и загрязненность газовой среды, а также загрязнение поверхности объекта контроля непроводящими веществами.
Вихретоковые преобразователи устойчивы к механическим и атмосферным взаимодействиям, могут работать в агрессивных средах, при высоких температурах и давлениях, так как в большинстве случаев катушки преобразователей помещают в предохранительный корпус и герметически закрывают.
К недостаткам вихретокового метода контроля следует отнести, во-первых, то, что можно проводить контроль только у электропроводящих объектов: металлы, сплавы, графит, полупроводники, во-вторых, малую глубину зоны контроля, которая не превышает нескольких миллиметров, так как определяется глубиной проникновения в контролируемую среду электромагнитного поля.
Дата добавления: 2020-04-12; просмотров: 1857;
Поиск по сайту
Узнать еще
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- Cбор государственных налогов с различных слоев населения
- I тип реакций. Реакции, характерные для органических кислот.
- I. 5. Тесты для контроля знаний раздела I
- II раздел. Организация работы логопеда в группе для детей с ОНР
- III. Здания для проживания людей
- III. Тесты для самоконтроля студентов
- III. ТРЕБОВАНИЯ РКФ ДЛЯ ДОПУСКА СОБАК В ПЛЕМЕННОЕ РАЗВЕДЕНИЕ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
